(54) СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
1
Изобретение относится к электротехнике,, может быть использовано для регулирования. электропривода и предназначено для установки механизма в заданное падожение.
По основному авт. св. N 8 42707 известна система управления электроприводом, содержащая злектропривод, выход которого через датчик скорости подключен к регулятору скорости, а через датчик положения - к рёгуляг тору положения, второй вход которого подсоединен к задатчику, а выход регулятора скорости подключен к выходу электросфивода, а также последовательно соединенные источник опорного сигнала, блок выделения максимума и делительное устройство, второй вход которого подключен к выходу регулятора положения, а выход - к второму входу регулятора скорости, второй вход блока выделения максимума с выходом датчика скорости 11.
Недостатком известного устройства явля- , ется наличие некоторых динамических перегрузок, вызываемь1х пиками токов в точках перелома тахограммы, особенно при треугольном характере тахограмм. Указанные пики токов определяются форсирующим действием сигнала, пропорщгаиального факти ской ско ;рости электропривода (по сравнению с оагиалом, пропорциоиальным заданной скорости) при формировании параболической функции на дeлитeльнo устройствеЦелью изобретения является -сшжеиие динамических перегрузок электропривода.
Цель достигается тем, что в систему введены сумматор и блоки устшовки коэффициентов заданной и фактической скорости, при этом выход датчика скорости соедниен с блоком выделения максимума через последовательно соединенные блок установки коэффициента фактической скорости и сумматор, второй вход которого через блок установки коэффициента заданной скорости подключи к выходу делите1а ного устройства.
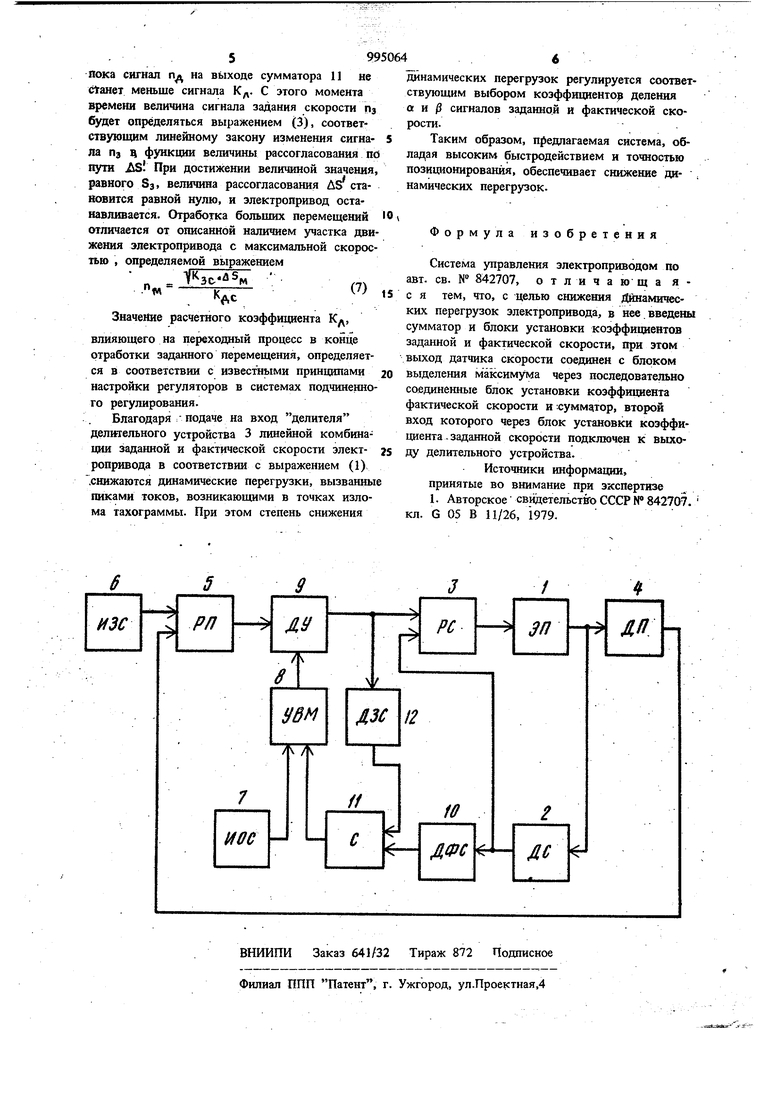
На чертеже приведена функциональная схема системы.ч
Система содержит электропривод 1, выход которого через датчик 2 скорости подключен к регулятору 3 скорости, а через 399 датчик 4 положения - к регулятору 5 положения, второй вход которого подсоединен к задатчику 6, а выход регулятора скорости подключен к входу электропривода 1. Система содержит также последовательно соединенные источник 7 опорного сигнала, блок 8 вьщелення максимума и делительное устройство 9, второй вход которого подклюг чен к выходу регулятора 5 положения, а выход - к второму входу регулятора 3 скорости, .второй вход блока 8 выделения максимума соединен с выходом датчика 2 скорости Выход датчика 2 скорости соединен с блоком 3 вьщеления максимума через последовательно соединенные блбк 10 установки коэффицие та фактической скорости и сумматор 11, вто рой вход которого через блок 12 установки коэффициента заданной скорости подключен к выходу делительного устройства 9. Делительное устройство 9 предназначено для деления рассогласования по пути AS на величину, пропорциональную скорости электропривода, либо на постоянную величину. Электропривод 1 содержит регулятор тока усилитель мощности и электродвигатель.. Датшк 4 положения предназначен для измерения величины перемещения механизма относительно точки, принятой за начало отсчета. Узел выделения максимума 8 предназначен для вьщеления большей из двух величин, поступающих на. его входы: величины, про порциональной линейной комбинации заданной и фактической скоростей электропривода, и величины расчетного коэффициента Кд. Источник 7 опорного сигнала предназначен для ввода величины рассчетного коэффициента Кд. Блок 12 установки коэффициента заданной скорости предназначен для. выбора коэффициента деления а сигнала заданной скорости, а блок 10 установки коэффициента фактической скорости - для выбора коэффициента делеиия : ft сигнала фактической скорости. Система работает следующим образом. С выхода задатчика 6 сигнал заданного .дйложенияМеханизма подается на первый вход регулятора 5 положения. На выходе регулятора положения возникает сигнал рассогласования Д sf Д S, если БЗ Д S, или Д s 5з, если SB Д 5,ц. Сигнал Д s поступа ет на йход делимого делительного устройств 9. На вход делителя делительного устройства 9 с выхода блока 8 выбора максимума подае . ся либо сигнал .hv с выхода источника 7 опорного сигнала, либо сигнал 1Пд с выхода сумматора И, представляюпщй собой линейную комбинациюСигналов заданной Пз и фактической Пф скорости где коэффициент передачи датчика, с%рости. Для удобства настройки можно положить а + 1(2) Так как в начальный Момент времени заанная и фактическая скорости электрЬпривода равны нулю, на вход делителя делительного устройства 9 с блока 8 выбора максимума подается сигнал Кд. При этом на выхое делительного устройства 9 возникает сигнал п -Ьс. где Kgj.- масштабный коэффициент. Этот сигнал подается на первый вход регулятора. 3 скорости, на выходе которого возникает сигнал з, не превышающий некоторогр максимального значения i,.,, который подается на вход подчиненного ему регулятора тока электропривода I. В результате Этого двигатель электропривода начинает разгоняться с темпом, определяемым величиной сигнала 1з, а на выходе датчика 2 скорости, возникает сигнал Кдр С. момента времени, когда сигнал Кд станет меньше величш№1 п л , выходной сигнал делительного устройства 9 будет определяться выражением д в. процессе разгона электропривода его скорости Пф увеличивается, а величина рассогласования по пути Д 8 уменьшается. При достатотао высоком коэффициенте усиления регулятора 3 скорости можно считать, что к моменту окрщания процесса разгона электропривода и при его движении на участке торможения имеет место равенство сигналов задания и обратной связи на входах регулятора 3i скорости. При этом Пз Кдс Пф (5) Решая совместно (4) и (5) получим Пз Кэс-AS(6) Из выражения (6) видно, что сигнал задания скорости электропривода пз плавно изменяется на участке торможения по паработшческому закону в функции величины рассогласованйя по пути Д S. При этом скорость электропривода изменяется линейно во времени с постоянным заданным замедлением. Такой процесс торможения продолжается до тех пор. 599 пока сигнал пд на выходе сумматора 11 не ctaHCT меньше снгнала К. С этого момента времени величина сигнала задания скорости Пэ будет определяться выражением (3), соответствуюидим линейному закону изменения сигнаяа Пз ц функции величины рассогласования по пути JiS. При достижении величиной значения, равного 8з величина рассогласования AS становится равной нулю, и электропривод останавливается. Отработка больших перемещений отличается от описанной наличием участка движения электропривода с максимальной скоростью , определяемой выражением Значение расчетного коэффициента Кд, влияющего на переходаый процесс в конце отработки заданного перемещения, определяется в соответствии с известными принципами настройки регуляторов в системах подчиненного регулирования. Благодаря .-подаче на вход делителя делкгельного устройства 3 линейной комбинации заданной и фактической скорости электронривода в соответствии с выражением (1) снижаются динамические перегрузки, вызванны пиками токов, возникающими в точках излома тахограммы. При этом степень снижения динамических перегрузок регулируется соответствующим выбором козффнциентор деления а и /3 сигналов заданной и фактической скорости.. Таким образом, предлагаемая система, обладая высоким быстродействием и точностью позивдюнированйя, обеспечивает снижение ди- ; намических перегрузок. Формула изобретения Система управления электроприводом по авт. св. N 842707, о т л и ч а ю щ а я с я тем, что, с целью снижения Динамических перегрузок электропривода, в нее введены сумматор и блоки установки коэффициентов заданной и фактической скорости, при этом выход датчика скорости соединен с блоком выделения максимума через последовательно соединенные блок установки коэффициента фактической скорости и «уммчтор, второй вход которого через блок установки коэффициента. заданной скорости подключен к выходу делительного устройства. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 842707. кл. G 05 В 11/26, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электроприводом | 1979 |
|
SU842707A1 |
| Система управления приводом летучих ножниц | 1978 |
|
SU874279A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Система управления электроприводом летучих ножниц | 1986 |
|
SU1433657A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU746418A1 |
| Устройство для управления летучими ножницами | 1984 |
|
SU1212716A1 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Устройство управления электроприводом летучих ножниц | 1990 |
|
SU1750868A1 |
