(54) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА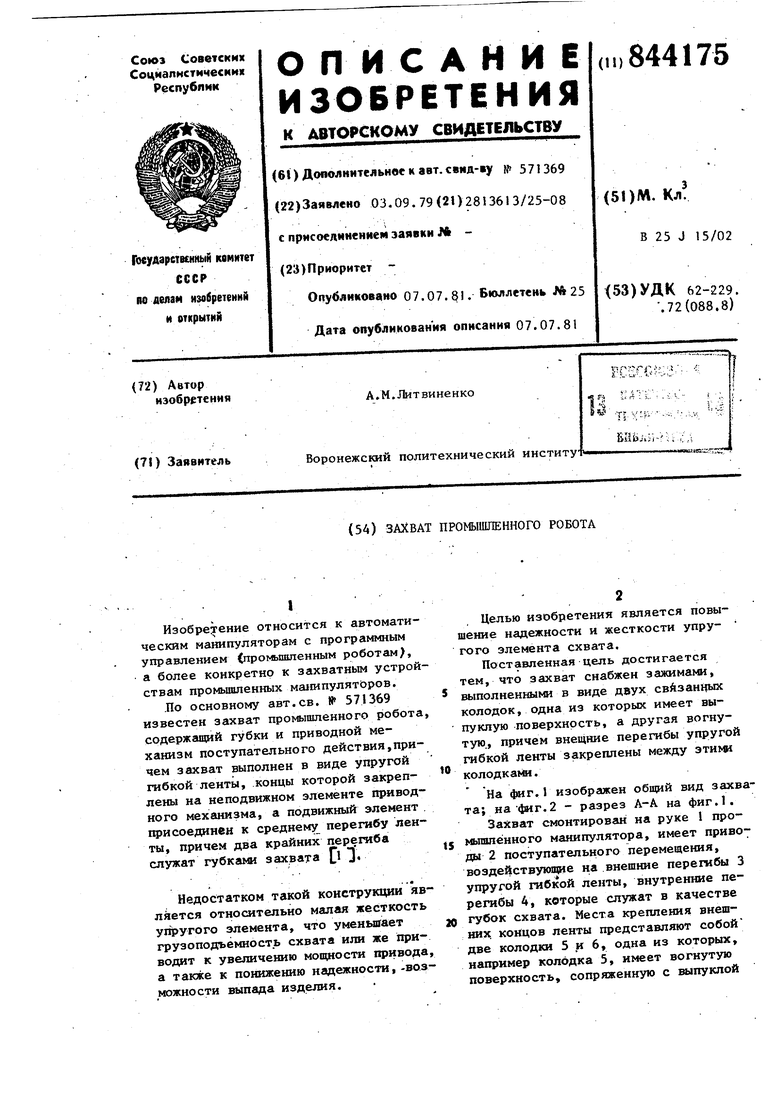

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| Захват промышленного робота | 1983 |
|
SU1110628A2 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Схват промышленного робота | 1989 |
|
SU1770121A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
Изобретение отиосится к автоматическим манипуляторам с программным управлением Спромьшшенным роботам), а более конкретно к захватным устройствам промьшшенных ма1гапулятОров.
.По основному авт.св. № 571369 известен захват промышленного робота содержащий губки и приводной механизм поступательного действия,причем захват выполнен в виде упругой гибкой ленты, концы которой закреплены на неподвижном элементе приводного механизма, а подвижный элемент . присоединен к среднему перегибу ленты, причем два крайних перегиба служат губками захвата D J
Недостатком такой конструкции является относительно малая жесткость упругого элемента, что уменьшает грузоподъемность схвата ИJш же приводит к увеличению мощности привода, а также к понижению надежности, -возможности выпада изделия.
Целью изобретения является повышение надежности и жесткости упругого элемента схвата.
Поставленная цель достигается тем, что захват снабжен зажимами, выполнениями в виде двух связанных колодок, одна из которых имеет выпуклую поверхность, а другая вогнутую., причем внещние перегибы упругой гибкой ленты закреплены между этигда колодкакм.
На . 1 изображен общий вид захвата; на 4иг. 2 - разрез А-А на фиг.1.
Захват смонтирован на руке 1 промышленного манипулятора, имеет приводы 2 поступательного перемещения, воздействующие на внешние перепсбы 3 упругой гибкой ленты, внутренние перегибы 4, которые служат в качестве губок схвата. Места кретшения внешних, концов ленты представляют собой две колодки 5 и 6, одна из которых, например колодка 5, имеет вогнутую поверхность, сопряженную с выпуклой
