Изобретение относится к области автоматизации производственных процессов с применением промышленных роботов.
Известен схват промышленного робота, губки которого закреплены на двух симметрично расположенных относительно оси захвата плоских пружинах. На каждой пружине сформированы два участка, параллельных оси схаата, и два. образующих с этой осью некоторый угол. Концы пружин закреплены на корпусе и проходят через пазы пластины, соединенной с цилиндром.
Недостатком известного схвата является необходимость формирования пружин для образования рабочих участков, что усложняет конструкцию схвата. Кроме того, в схвате используется цилиндр двухстороннего действия, что также усложняет его конструкцию.
Известно захватное устройство, содержащее губки, установленные в корпусе с возможностью возвратно-поступательного перемещения под действием привода, и механизм передачи движения от выходного звена привода к губкам.
Недостатком этого устройства является сложность конструкции механизма передачи движения от привода к губкам, выполненного в виде вала с резьбовыми частями, гаек, установленных на резьбовых частях вала и соединенных с зажимными губками с помощью шарнирных планок.
Цель изобретения - упрощение конструкции.
С этой целью в схвате промышленного робота, содержащем корпус, губки, установленные в корпусе с возможностью возвратно-поступательного перемещения и кинематически связанные с приводом, при этом в кинематическую связь каждой губки включена плоская пружина, расположенная своей средней частью в выполненных е губках пазах, один конец которой имеет возможность упора в корпус, а Другой - в шток, при этом каждая губка выполнена с возможностью перемещения по дополнительно выполненным направляющим корпуса и с возможностью взаимодействия с плоской пружиной, причем длина пружин в свободном состоянии больше максимального расстояния между упорными плоскостями корпуса и штока.
Таким образом, заявляемый схват соответствует критерию изобретения новизна.
Сравнительный анализ заявляемого технического решения с другими техническими решениями показал, что известные технические решения в данной области техники не содержат признаки, аналогичные
отличительным признакам заявляемого схвата. Это позволяет сделать вывод о соответствии критерию существенные отличия.
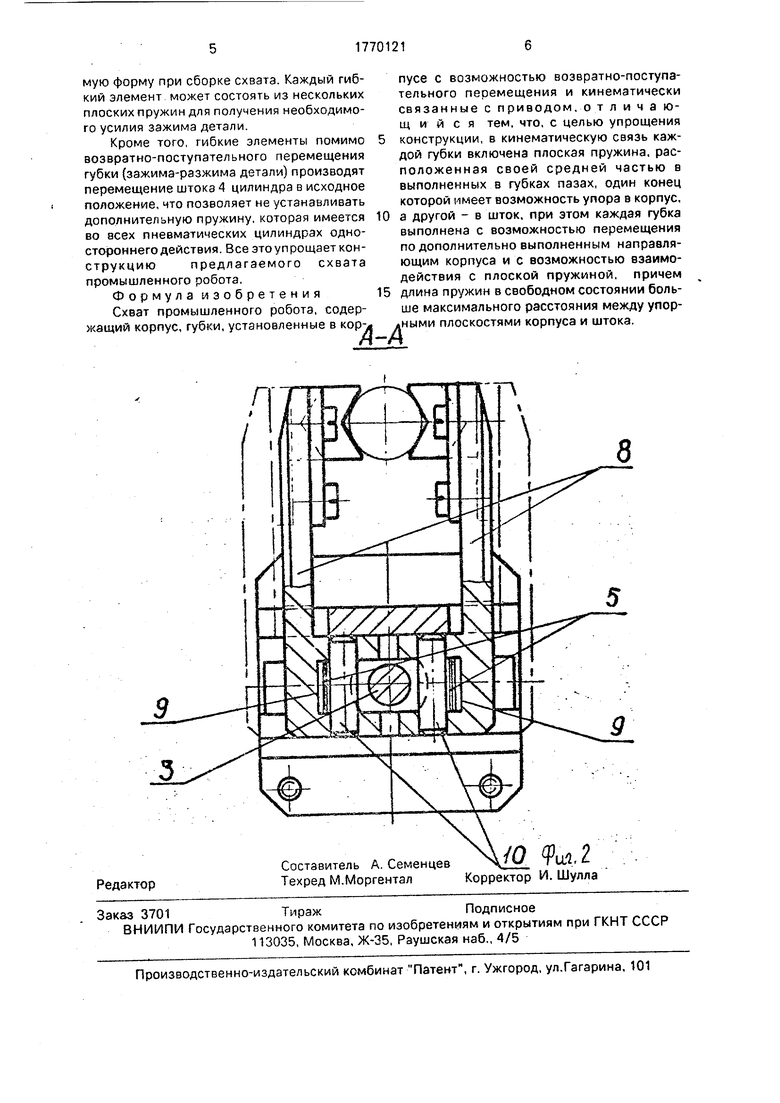
На фиг. 1 показан общий вид схвата промышленного робота, на фиг.2 - сечение А-А на фиг.1.
Схват содержит корпус 1, на котором закреплен привод 2, выполненный, например. з виде пневматического мембранного цилиндра со штоком 3. На штоке 3 закреплен упор 4. В корпусе 1 размещены упругие элемент ; 5, выполненные в виде плоских пружин, одни концы которых контактируют
с плоскостями 6 упора 4, а другие - с плоскостями 7 корпуса 1.
Длина упругих элементов 5 в свободном (плоском) состоянии больше, например, на 3-4% максимального расстояния Н между
плоскостями 6 и 7. Это позволяет при сборке схвата образовать на упругих элементах выпуклые и вогнутые части.
В корпусе 1 установлены губки 8 с возможностью возвратно-поступательного перемещения. В губках 8 плоскостями 9 и штифтами 10 образованы пазы, в которых упругие элементы 5 размещены с возможностью контактирования выпуклыми частями с плоскостями 9. а вогнутым - со штифтами 10.
В корпусе 1 и упоре 4 выполнены также наклонные плоскости 11 и 12. которые препятствуют перемещению концов упругих элементов 5 в направлении, перпендикуляриом продольной оси схаата. Подача сжатого воздуха в рабочую полость пневматического мембранного цилиндра производится через отверстия 13.
Схват промышленного робота работает следующим образом.
При подаче сжатого воздуха через отверстие 13 в рабочую полость мембранного цилиндра 2 происходит перемещение штока 3 с закрепленным на нем упором 4. Перемещение упора вызывает изгиб гибких элементов 5 (плоских пружин), которые выпуклой частью воздействуют на плоскости 9 губок 8, перемещая их, происходит раскрытле схвата. При отключении подачи воздуха гибкие элементы 5, воздействуя на упор 4, перемещают его вместе с мембраной в исходное положение, При этом вогнутые части гибких элементов, контактируя со штифтами 10, сближают губки 8. происходит зажим детали.
В предлагаемом схвате в качестве гибких элементов использованы обычные плоские пружины, выполненные, например, из стали 65Г, которые приобретают необходимую форму при сборке схвата. Каждый гибкий элемент может состоять из нескольких плоских пружин для получения необходимого усилия зажима детали.
Кроме того, гибкие элементы помимо возвратно-поступательного перемещения губки (зажима-разжима детали) производят перемещение штока 4 цилиндра в исходное положение, что позволяет не устанавливать дополнительную пружину, которая имеется во всех пневматических цилиндрах одностороннего действия. Все это упрощает конструкцию предлагаемого схвата промышленного робота.
Формула изобретения Схват промышленного робота, содержащий корпус, губки, установленные в кор
пусе с возможностью возвратно-поступательного перемещения и кинематически связанные с приводом, отличающийся тем. что, с целью упрощения
5 конструкции, в кинематическую связь каждой губки включена плоская пружина, расположенная своей средней частью в выполненных в губках пазах, один конец которой имеет возможность упора в корпус,
10 а другой - в шток, при этом каждая губка выполнена с возможностью перемещения по дополнительно выполненным направляющим корпуса и с возможностью взаимодействия с плоской пружиной, причем
15 длина пружин в свободном состоянии больше максимального расстояния между упорными плоскостями корпуса и штока.
-Д
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2008200C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
Использование: для автоматизации производственных процессов с применением П / Ч 1 промышленных роботов. Сущность изобретения: привод каждой губки 8 выполнен в виде плоской пружины 5, один конец которой упирается в поверхность 7 корпуса, а другой - в упор 4 штока 3. Каждая губка перемещается по направляющим корпуса. При подаче сжатого воздуха в рабочую полость цилиндра шток 3 с упором 4 перемещается, обеспечивая изгиб плоских пружин 5, которые перемещают губки 8, происходит раскрытие губок. При отключении прдачи воздуха пружины 5 перемещают шток в исходное положение, губки 8 сближаются, происходит зажим детали, 2 ил. 7 / VI V| О ю
Редактор
Составитель А. Семенцев 1М Т1ДД, - Техред М.МоргенталКорректор И. Шулла
8
| 0 |
|
SU264881A1 | |
| Устройство для регистрации замерзания и оттаивания почвы | 1923 |
|
SU825A1 |
