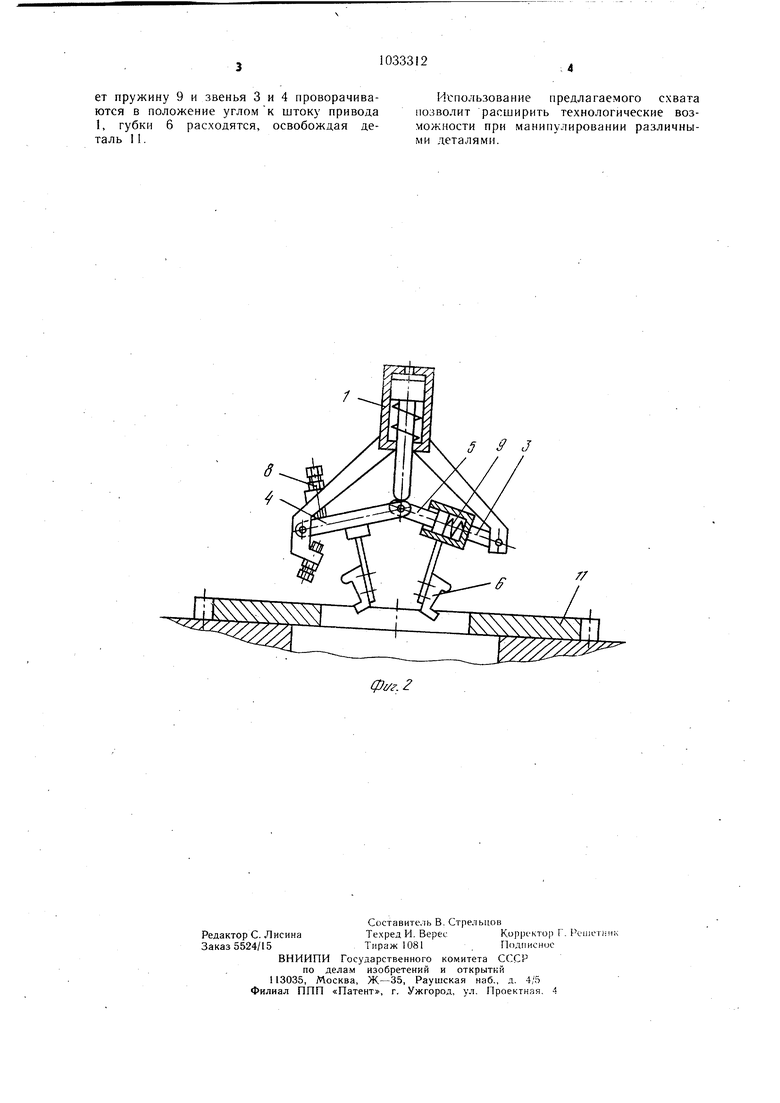
ii: u6poTciiiie относится к автоматизации )из,1ичны. процессов и может быть испольjoisaiK) в машиностроении, приборостроении и других областях как средство для удержания ;1,егали при трамсгюртировке.
Известе - схват промышленного робота, с;).чержаг1. г1бки и приводной механизм поступательного действия, выполненный в вялс упругой гибкой ленты, концы которой закреплены на неподвижном элементе ) механизма, а подвижный элемент нрисоедипен к среднему перегибу ленты, причем два крайних перегиба служат губками захвата 1.
Недостаток известного схвата - нена;|,ежное удержание детали.
Известен схват промышленного робота, содержащий корпус, губки, расположенные на упругом элементе и привод перемещения 2.
Недостатком известного схвата является то, что он захватывает деталь только снаружи путем ее oxisaTa по внешней поверхности и с его помощью невозможно надежно захватить детали, имеющие наружную поверхность сложной конфигурации (детали типа niecTCpen). детали с большими линейными размерами (длиной и шириной) и детали, имеющие отверстия. Кроме того, на,1ичие в извесгном схвате только двух устойчивых положений упругого элемента и связаяных с ннм губок затрудняет его регулировку, что отражается на надежности работы схвата.
Цель изобрегения - расширение технологических возможностей схвата за счет захвата деталей за наружные и внутренние поверхности, ось которых смещена относительно оси схвата.
Постав,;спная цель достигается тем, что и i,Miai.- нпомьпиленного робота, содержаИ1.м кормуг, губки, расположенные на упруiOM элементе, и привод перемещения, упругий элемент выполнен в виде трехзвенной стержпевой системы, первые и вторые звенья которой жестко связаны с губками и И1арнирно с корпусом, а первое и третье звенья шарнирнг) связаны между собой и иодпружинеиы (,ч косительно друг друга.
На . 1 изображен предлагаемый схват в положепии .чли захвата дета.П за наружную поверхность; на фиг. 2 тп же, в положении для захвата детали за liiiутреннюю П(Ж1 рлНОСТЬ.
(;. состоит из прии.одг: , например, цилиндра корпуса 2, трсхзвенной стержневой системы, .включающей звенья 3, н и 5. Г1ричем звенья 3 и 4 шарнирно связаны с корпусом 2, образуя врапхательные пары, а . .о 5 подпружинено относительно : .. образуя с ним поступательную пару, г : 1|)нирно связано со звеном 4, образуя ним вращательную пару. На звеньях 3
и 4 установлены сменные губки 6, на корпусе 2 - фиксаторы 7 и 8, ограничивающие положения звеньев стержневой системы 3, 4 и 5. Звенья 3 и 5, входящие в поступательную пару, подпружинены пружиной 9.
Для захвата детали за наружные поверхности (фиг. I) трехзвенная стержневая система, состоящая из звеньев 3, 4 и 5, устанавливается углом к деталям 10. Губки 6 располагаются на звеньях 3 и 4 рабочей поверхностью к оси штока привода 1. При отключенном приводе I губки 6 разведены в стороны, причем степень разведения регулируется фиксатором 7. При подходе схвата
5 к датели 10 он упирается звеном 4 в зажимаемую деталь 10. Звено 5 проворачивается относительно звена 4, причем звено 5, перемещаясь поступательно относительно звена 3, сжимает пружину 9, и звенья 3 и 4, провернувшись во вращательных парах с корпусом 2, совершают переход из исходного положения (УГЛОМ к детали 10) в положение углом к приводу 1, ограниченное фиксатором 8. При этом губки 6 сходятся и зажимают деталь 10 в силу изменения угла меж.ау
5 звеньями 3 и 4. Далее зажатая деталь 10 переносится на рабочую позицию, включается привод 1, шток которого, упираясь в звено 4, проворачивает звено 5 относительно звена 4, причем звено 5, перемещаясь поступательно относительно звена 3, сжимает
0 пружину 9, и звенья 3 и 4, провернувшись во вращательных парах с корпусом 2. переходят в исходное положение (углом к детали), губки Н расходятся и освобождают деталь 0.
Для захвата деталей за внутренние поверхности (фиг. 2) трехзвенная стержневая система, состоящая из звеньев 3, 4 и 5, устанавливается в исходное положение - углом к приводу 1, ограниченное фиксатором 8, губки 6 устанавливаются на звеньях 3 и 4 )абочей поверхностью в сторону, противоположную оси И1тока привода 1. При подх(х1о схвата к датели 11 включается привод. 1, ;:ггок которого, упираясь в звено 4, поворачивает звено 5 относительно звена 4,
звено 5, перемещаясь поступательно относительно звена 3, сжимает пружину 9, в результате звенья 3 и 4 проворачиваются во враи ательных парах с корпусом 2 и переходят в положение углом к детали il, ограниченное фиксатором 7. При этом губки б
0 разводятся в стороны благодаря изменению угла между звеньями 3 и 4 и захватывают деталь 11. Зажатая деталь 11 переносится на рабочую позицию, здесь схват опускает ее на рабочую поверхность и продолжает движение до тех пор, пока перемещение
корпуса 2 относительно неподвижных губок 6 не заставит звено 5 нровернуться относительно звена 4, причем звено 5, перемещаясь поступательно относительно звена 3, сжимает пружину 9 и звенья 3 и 4 проворачиваются в положение угломк штоку привода 1, губки 6 расходятся, освобождая деталь 11.
Использование предлагаемого схвата позволит расширить технологические возможности при манипулировании различными деталями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Схват манипулятора | 1984 |
|
SU1214410A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Схват | 1982 |
|
SU1057272A1 |
СХВАТ ПРОМЫШЛЕННОГО РО.БОТА, содержащий корпус, губки, расположенные на упругом элементе, и привод перемещения, отличающийся тем, что, с целью расщирения его технологических возможностей за счет захвата деталей за наружные и внутренние поверхности, ось которых смещена относительно оси схвата, упругий элемент выполнен в виде трехзвенной стержневой системы, первые и вторые звенья кotopoй жестко связаны с губками и щарнирно с корпусом, а первое и третье звенья шарнирно связаны между собой и подпружинены относительно друг друга. в 1(Л со ОО СО NMk to ттт ф{/г.
5 J
Фе/г.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват промышленного робота | 1975 |
|
SU571369A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захват промышленного робота | 1977 |
|
SU672014A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
