о
05
го
00
Изобретение относится к за.хвгциым устpoiicTHaM д,1И промышленных роботов.
По основ}юму авт. св. № 571369 известен за.хват промышленного робота, содержащий приводной механизм поступательного действия и губки в виде упругой гибкой ленты, концы которой закреплены iia неподвижном элементе приводного механизма, а подвижный элемент присоединен к среднему перегибу ленты, причем два крайних перегиба служат губками захвата 1.
Однако эта конструкция обладает низкой надежностью работы вследствие того, что при включении приводного механизма губки захвата сближаются на малую величину, которая может обеспечить только слабое прижатие детали.
Целью изобретения является повышение надежности работы и увеличение грузоподъемности захвата промышленного робота.
Поставленная цель достигается тем, что захват промышленного робота снабжен установленными в крайних перегибах упругой гибкой ленты дополнительными упругими элементами, закрепленными одними концами в одной для каждого перегиба точке на неподвижном элементе приводного механизма, а другими концами - на другой гибкой ленте с интервала.ми между этими концами.
На чертеже показан промышленный робот, обший вид.
За.хват, смонтированный на руке 1 нро.мышленного робота, имеет приводной механизм 2 с неподвижным элементом 3 и упругую гибкую ленту 4, соединенную средни.м перегибом 5 с подвижным элементом - штоко.м 6 приводного механизма 2.. Крайние перегибы 7 упругой ленты 4 являются губками захвата.
В крайних перегибах 7 упругой гибкой ленты 4 закреплены дополнительные упругие элементы 8 одними концами в одной точке на неподвижном элементе 3 приводного механизма 2, а други.ми концами - на упругой гибкой ленте 4 с интервалами 9 между этими концами. Вследствие этого упругие элементы 8 имеют различную длину. Между губками 7 располагается деталь 10.
Работа захвата осуществляется следующим образом.
При наличии детали 10 .между губками 7 захвата срабатывает приводной механизм 2. При этом шток 6 приводного механизма 2, 0 перемешаясь, тянет за собой упругую гибкую ленту 4. Последняя увлекает за еобой упругие элементы 8, которые поворачиваются относительно точки закрепления на неподвижном элементе 3, и прижимает деталь 10. А упругие элементы 8 усиливают прижатие.
Упругие элементы, выполненные, например, из ленты, увеличивают кривизну крайних перегибов, что увеличивает величин} сжатия детали губками, т. е. приводит к повышению надежности работы захвата и увеличению его грузоподъемности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
| Захват промышленного робота | 1979 |
|
SU844175A2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захват промышленного робота | 1977 |
|
SU611775A2 |
| Захват | 1977 |
|
SU662343A1 |
| Захват промышленного робота | 1978 |
|
SU666074A2 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| Захват промышленного робота | 1988 |
|
SU1696299A1 |
ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА по акт. св. Л 571369, отличающийся тем, что. с целью повышения надежности н чвелнчения грхзоподъемностн. он снабжен установленными в крайни.х . нругои гибкой ле1:ты дополнительн1 1мн унру|-нми -(лемеи.тамн. закрепленными одннми конпамн в одной для каждого перегиба точке на неподв 1жном элементе прнводно1о механизма, а ;iin:iiMn концами --- на ynpvi-oii гибкой лсчгго с HHTepii;:i;;;iMH между концами.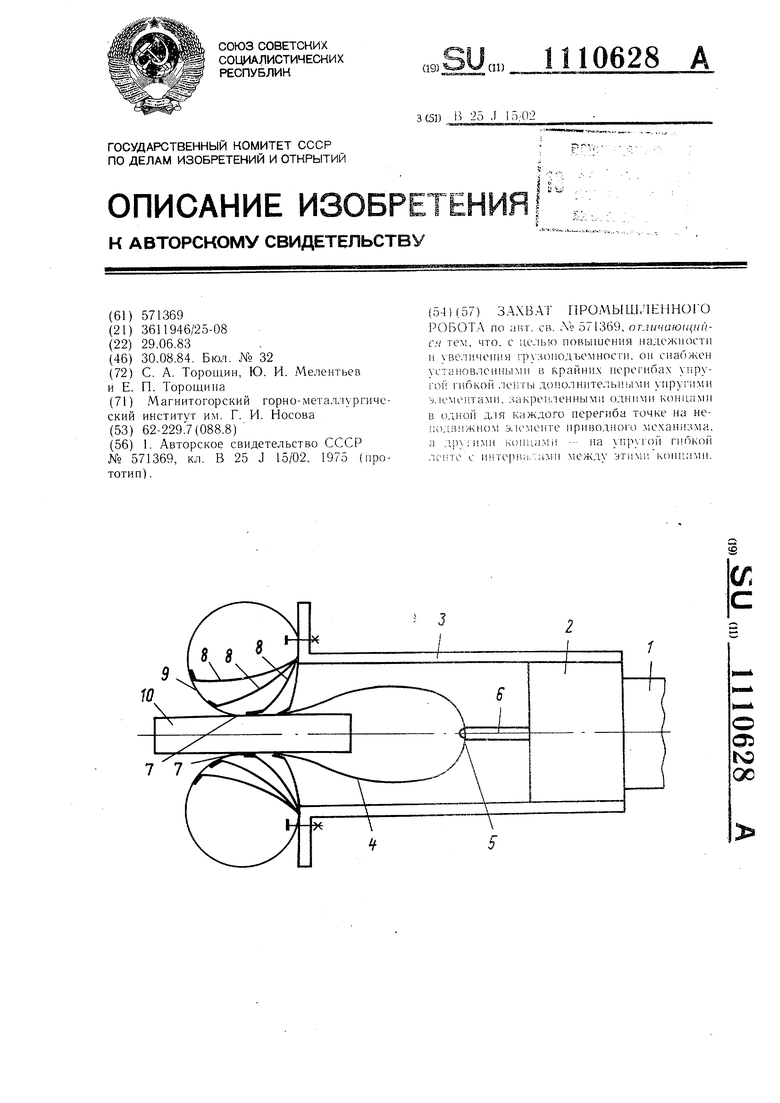
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват промышленного робота | 1975 |
|
SU571369A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
