1
; Изобретение относится к управлению прицепными звеньями автопоездов, преимущественно длиннобазных и многозвенных.
Известен способ управления поворотом прицепных звеньев автопоезда, заключающийся в том, что определяют угол поворота управляемых колес предшествующего звена и задерживают сигнал, пропорциональный углу поворота управляемых колес {.
Недостатком данного способа является то, что он применим для управления колесами прицепов или независимых поворотных тележек, базы которых равны между собой. При неравенстве баз звеньев появляются смещения колес на повороте, которые могут достигать значительной величины.
Целью настоящего изобретения является повышение точности управления путем повторения яеповоротными колесами последующего звена траектории движения неповоротных колес предшествующего звена независимо от рельефа дороги и изменения скорости движения автопоезда в процессе поворота.
Указанная цель достигается тем, что поворачивают управляемые колеса последующего звена на угол, при котором мгновенный радиус поворота пеповоротных колес последующего звена равен зафиксированному радиусу поворота неповоротных колес предшествующего звена, а задержку сигнала проводят на время, необходимое для прохождения неповоротпыми колесами
5 последующего звена пути, равного расстоянию вдоль траектории движения до неповоротных колес предшествующего звена, а также тем, что угол, на который поворачивают управляемые колеса последующего
10 звена, определяют по формуле:
YKO (-T3), LI
где LI - база предшествующего звена; 15 /-2 - база последующего звена;YI ( - Тз ) - угол поворота управляемых колес предшествующего звена в момент времени (t-Тз); / - текущее время; 20 Тз - время задержки сигнала, пропор:ционального углу поворота.
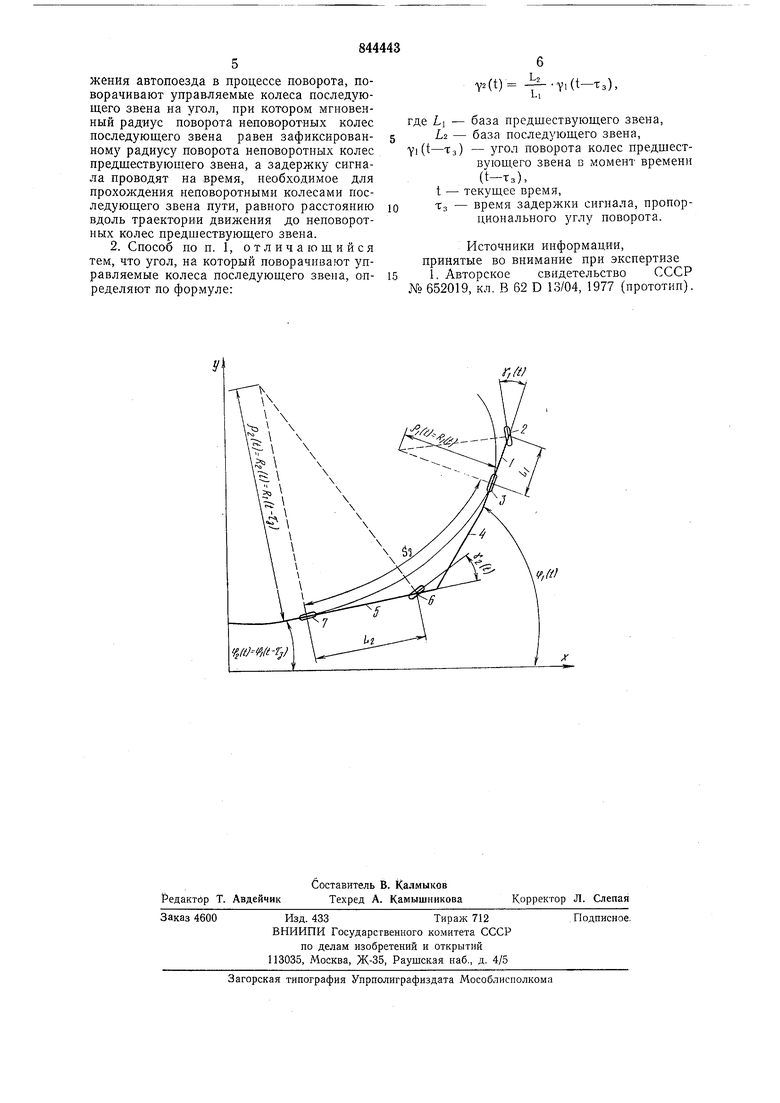
На чертеже изображена схема автопоезда на повороте при движении задних непо воротных колес звеньев по одной траектории.
Автопоезд имеет головное (предшествующее) звено 1 с передними поворотными колесами 2 и задними неповоротными колесами 3, дышло 4 и последующее звено 5 с 30 передними поворотными колесами 6 и задними неповоротными колесами 7. Угол поворота колес 2 предптествующего звена 1 определяют в функции пути, пройденного задними неповоротными колесами 3. Сигнал, пропорциональный углу поворота колес 2, задерживают на время Тз, необходимое для прохождения недоворотными колесами 7 последующего звена 5 пути, равного расстоянию вдоль траектории движения до неповоротных колес 3 предн1ествующего звена I, т. е. L+ I (V,-V2)dt 5з. о - V.где L - расстояние от колес 3 до колес 7 при прямолинейном движении автопоезда; 5з - то же, при криволинейном движении; V; - поступательная скорость движения колес 3; Vz - поступательная скорость движения колес 7 t - время. Колеса 6 последующего звена поворачивают так, чтобы мгновенный радиус поворота неповоротных колес 7 был равен задержанному мгновенному радиусу поворота неповоротных колес 3 предшестБуюп1его звена, т. е.: R2(t) R,(t-T3),(2) где (t) - мгновенный радиус поворота колес 7, определенный в момент времени t, 1 ( - Тз ) - мгновенный радиус поворота колес 3, определенный не в данный момент времени г, а раньше на величину времени запаздыва НИЯ Та . При этом угол, на который поворачивают колеса 7 для выполнения условия (2), определяют из следующего выражения: Y4t)arctg ,(t-T3), где LI - база предшествующего звена 1; Ls - база последующего звена 5; Y2(t) - относительный угол поворота колес 6 в момент времени /; YI (t-Тз) - относительный угол поворота колес 2 в момент времени (t - Тз). Как известно, для обеспечения движения колес автопоезда по одной траектории на повороте необходимо и достаточно, чтобы в каждой точке пути абсолютные углы последующих колес были бы такими же, как и у предшествующих колес. Ф2(1)ф1(1 -Тз),(4) где ф2(1) - абсолютный угол поворота колес 7 в момент времени t 9i(t - Тз) - абсолютный угол поворота колес 3 в момент времени (t-Тз). Поскольку производная от абсолютного угла поворота колес представляет собой кривизну траектории движения в данной точке, то для выполнения равенства (4) необходимо и достаточно, чтобы в соответствующих точках траектории совпадали радиусы кривизны, т. е.: P2(t) ,p,(t-T3),(5) где p2{t) - радиус кривизны траектории движения колес 7 в момент времени t; PI (t - Тз) - радиус кривизны траектории движения колес 3 в момент вре мени (t - Т-,). Поскольку колеса 3 и 7 неповоротные относительно рамы звеньев 1 и 5 соответственно, то радиусы кривизны траекторий совпадают с мгновенными радиусами поворота этих колес. Поэтому, для выполнения равенства (4), с учетом (5), необходимо и достаточно, чтобы в каждый момент времени выполнялось равенство (2). Заменяя мгновенные радиусы поворота их выражениями через базы звеньев и относительные углы поворота колес 2 и 6, равенство (2) запишется (t|) () Из равенства (6) после преобразований, получаем выражение (3), которое приблилсенно, при сравнительно небольшой величине углов Y2(t) и Yi(t-Тз), быть записаноYi(t-Тз) Аналогичным образом осуществляется управление поворотом длиннобазного прицепа с независимыми поворотными тележками, на которые шарпирно опирается грузонесущая рама, при этом предшествующим звеном является передняя поворотная тележка, а последующим звеном - задняя поворотная тележка. Использование заявляемого способа позволяет улучшить маневренность автопоездов, снизить стоимость строительства специальных дорог, предназначенных для их движения, повысить безопасность движения и уменьшить помехи, создаваемые ими транспортному потоку на дорогах. Формула изобретения 1. Способ управления поворотом прицепных звеньев автопоезда, заключающийся в том, что определяют угол поворота управляемых колес предшествующего звена и задерживают сигнал, пропорциональный углу поворота управляемых колес, о т л и ч аю щ и и с я тем, что с целью повынюния точности управления путем повторения неповоротными колесами последующего звена траектории движения неповоротных колес предшествующего звена независимо от рельефа дороги и изменения скорости движения автопоезда в процессе поворота, поворачивают управляемые колеса последующего звепа на угол, при котором мгновенный радиус поворота неповоротных колес последующего звена равен зафиксированному радиусу поворота неповоротных колес предществуюи1его звена, а задержку сигнала проводят на время, необходимое для прохождения неповоротными колесами последующего звена пути, равного расстоянию вдоль траектории движения до неповоротных колес предшествующего звена.
2. Способ по п. 1, отличающийся тем, что угол, на который поворачивают управляемые колеса последующего , определяют по формуле:
Y2(t) -.1(1-Тз),
LI
где L - база предшествующего звена,
Li - база последующего звена, Yi(t-Тз) - угол поворота колес предшествующего звена D момент времени
(t-Тз),
t - текущее время,
Тз - время задержки сигнала, пропорционального углу поворота.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 652019, кл. В 62 D 13/04, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Система рулевого управления многозвенного большегрузного седельного автопоезда | 1988 |
|
SU1664643A1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ ГРУЗОВ АВТОПОЕЗДОМ | 2013 |
|
RU2530208C1 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Способ управления задними колесами транспортного звена | 1977 |
|
SU683942A1 |
| Способ управления поворотом автотранспортного звена | 1980 |
|
SU979192A1 |
| Устройство для управления поворотом двухосной тележки полуприцепа | 1987 |
|
SU1482848A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Система рулевого управления колесами прицепного звена автопоезда | 1989 |
|
SU1740229A1 |
/;///
