(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИ ЗВЕНЬЕВ АВТОПОЕЗДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU710855A1 |
| Устройство для управления поворотом ведомых звеньев автопоезда | 1976 |
|
SU652019A1 |
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство для управления поворотом транспортного средства | 1977 |
|
SU660883A1 |
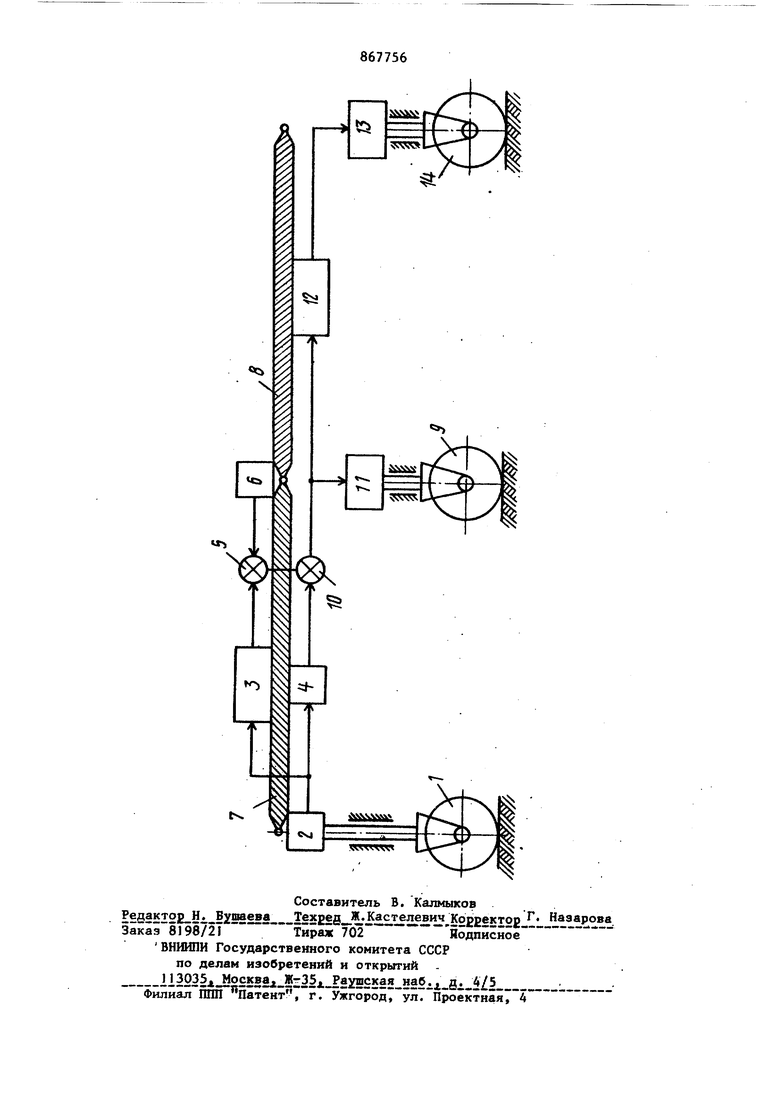
Изобретение относится к автомобилестроению, в частности к системам упр ления поворотом автотранс- портных звеньев автопоездов с четным числом звеньев. Известно устройство для управления поворотом звеньев автопоезда, со держащее для каждого звена привод поворота колес и механические датчик п ворота предшествующих колес, датчик угла складывания смежных звеньев автопоезда, сумматор углов ПЗНедостатком, такого устройства является то, что оно обеспечивает движения задних колес звена по траекто-. рии предшествующих колес только при круговом установившемся движении. В реальных же условиях эксплуатации, ха рактерных наличием неустановившихся режимов поворота, появляются смещения задних колес относительно траектории движения предшествующих колес. Известно также устройство для управления колесами звеньев автопоезда содержащее привод поворота колес каждого звена, датчик угла поворота предшествуювцсх колес звена, блок запаздывания, датчик угла складываиня предшествующего звена с последующим и сумматор, одни из входов которого соединен с датчиком угла складывания, а другой вход - с выхо-; дом блока запаздывания, вход которого соединен с датчиком угла поворота предшествующих колес fz. Недостатком данного устройства является то, что оно не обеспечивает устойчивости курсового движения автопоезда. При возникновении отклонения задних колес от траектории двкг жения предшествующих колес под действием случайных факторов или в результате погрешностей, которые возможны в процессе работы устройства, задние колеса не возвращаются к траектории движения передних колес, а монотонно удаляются от нее при даль3нейшем движении (даже при прямолинейном движении автопоезда). Цель изобретения - повышение безопасности и маневренности путем обеспечения устойчивого курсового движения автопоезда. Указанная цель достигается тем, что устройство снабжено пропорциональ ным звеном, вторым блоком запаздывания и вторым сумматором, один из входов которого соединен с выходом первого сумматора, другой вход - с выходом пропорционального звена, вход которого соединен с датчиком угла поворота предшествунщих колес, а выхо второго сумматора соединен с приводом поворота колес предшествунщего звена автопоезда и через второй блок запаздывания - с приводом поворота колес по следующе го звена. Кроме того, пропорциональное звено выполнено в виде усилителя с коэффициентом усиления, меньшим единицы. На чертеже показана блок-схема устройства для управления колесами двух звеньев автопоезда. Передние колеса 1 предшествующего звена соединены с датчиком 2 угла поворота, соединенным со входом блока 3 запаздывания и со входом пропорционального звена 4. Выход блока 3 запаздывания соединен с одним из входов сумматора 5, второй вход которого соединен с датчиком 6 угла складывания смежных звеньев, а именно рамы 7 предшествунлцего звена с рамой 8 поЪледукицего звена относительно задних управляемых колес 9. Выход сумматора 5 соединен с одним из входов вто рого сумматора 0, второй вход которого соединен с выходом пропорционального звена 4, а выход - с приводом 1 1 поворота предшествукицего звена колес 9 и с входом блока 12 запаздывания последующего звена, выход которого соединен с приводом 13 поворота задних колес 14 последукщегр звен Устройство работает следуннцим обр зом. При повороте передних колес 1 да чик 2 угла поворота фиксирует угол поворота колес 1 относительно рамы 7 данного звена автопоезда и посылает соответствующий сигнал в блок 3 запа дывания и на вход пропорционального звена 4. При складывании звеньев рам 7 и 8 в горизонтальной полости датчи 6 угла складывания смежных звеньев п сылает соответствующий, сигнал на оди 6 из входов сумматора 5. Блок 3 запаздывания задерживает поступивший в сигнал на время, зависящее от скорости движения автопоезда, расстояния между колесами 1 и 9 и разности поступательных скоростей движения этих колес. По истечении времени запаздывания блок запаздывания посылает сигнал на второй вход сумматора 5, который производит алгебраическое сложение сигналов, и посылает результирующий сигнал на один из входов второго сумматора 10.Звено 4 пропорционально уменьшает поступивший в него сигнал и полученный сигнал посылает на второй вход сумматора 10, который алгебраически складывает nocf тупившие на его входы сигналы и результирующий сигнал с выхода посылает в привод 11 поворота задних колес 9 и в блок 12 запаздывания последующего звена автопоезда. Привод 11 поворота отрабатывает поступивший в него сигнал и поворачивает задние колеса 9 относительно рамы 7 на угол r(t)rn(t-r)-t-rcKn(t)-K-rn(t), где тп) угол поворота предшествующих колес относительно рамы 7 звена в данный момент времени t; Тг(() угол поворота колес .|, задержанный на время С , т.е. определенный в мент времени (t-t); Tpjtj/t) угол складывания звена рамы 7 CD звеном рамы 8 в горизонтальной плоскости, определенный в момент времени t; К - коэффициент пропорциональности, задаваемый звеном 4. Блок 12 запаздывания, работакщий в соответствии со скоростями движения колес 9 и 14, задерживает поступивший в него сигнал, а затем подает его )з привод 13, который поворачивает задние колеса 14 последующего звена рамы 8 на угол, на который были повернуты колеса 9 до истечения времени запаздывания. Приведенная формула справедлива при соблюдении следующих правил знаков для углов. Углы поворота передних колес Г и задних колес 9 относительно рамы 7 имеют положительные значения при повороте против часовой стрелки (вид сверху на автопоезд) и отрицательные - по часовой стрелке. Угол
складывания имеет положительное значение при повороте последующего звень рамы 8 относительно предшествующего звена раьш 7 против часовой стрелки н отрицательные значения - при повороте по часовой стрелке.
Для. управления последующими двумя звеньями автопоезда устройство необходимо дополнительно снабдить такими же злементамн, связанными между собой аналогично, за исключением датчика угла поворота предшествующих колес. Такими колесами для последукнцих двух звеньев автопоезда являются колеса 4. Позтому схема управления должна быть соединена с выходом блока I2 запаздьшания. Аналогично можно построить устройство для управления автопоезда с любым четным числом звеньев,о
Предлагаемое устройство позволяет улучшить безопасность движения и маневренность автопоездов, что в свою очередь} повышает производительность труда и снижает себестоимость транспортировки.
Формула изобретения
I. Устройство для управления колесами звеньев автопоезда, содержащее дпя каждого звена привод поворота колес, датчик угла поворота предшествую щих колес звена, блок запаздывания, датчик угла складывания предшествующего звена с последующим и сумматор один из входов которого соединен с упомянутым датчиком угла складывания, а другой вход - с выходом блока запаздывания, вход которого соединен с датг чиком угла поворота предшествующих колес, отличающееся тем, что, с целью повышения безопасности и маневренности путем обеспечения устойчивого курсового движения автопоезда, оно снабжено пропорциональным звено:, вторым блоком запаздывания и вторым сумматором, один нз входов которого соединен с выходом 5 первого сумматора, другой вход - с выходом пропорционального звена, вход которого соединен с датчиком угла поворота предшествукицих колес, а выход второго су№1атора соединен с привйдом поворота колес предшествую0щего звена автопоезда и через второй блок запаздывания - с приводом поворота колес последукнцего звена. , 2. Устройство по п. I, отличающееся тем, что, пропорци5ональное звено выполнено в виде усилителя с козффициентом усиления, меньшим единицы.
Источники информации, принятые во внш4ан е при зкспертизе
