15
16
17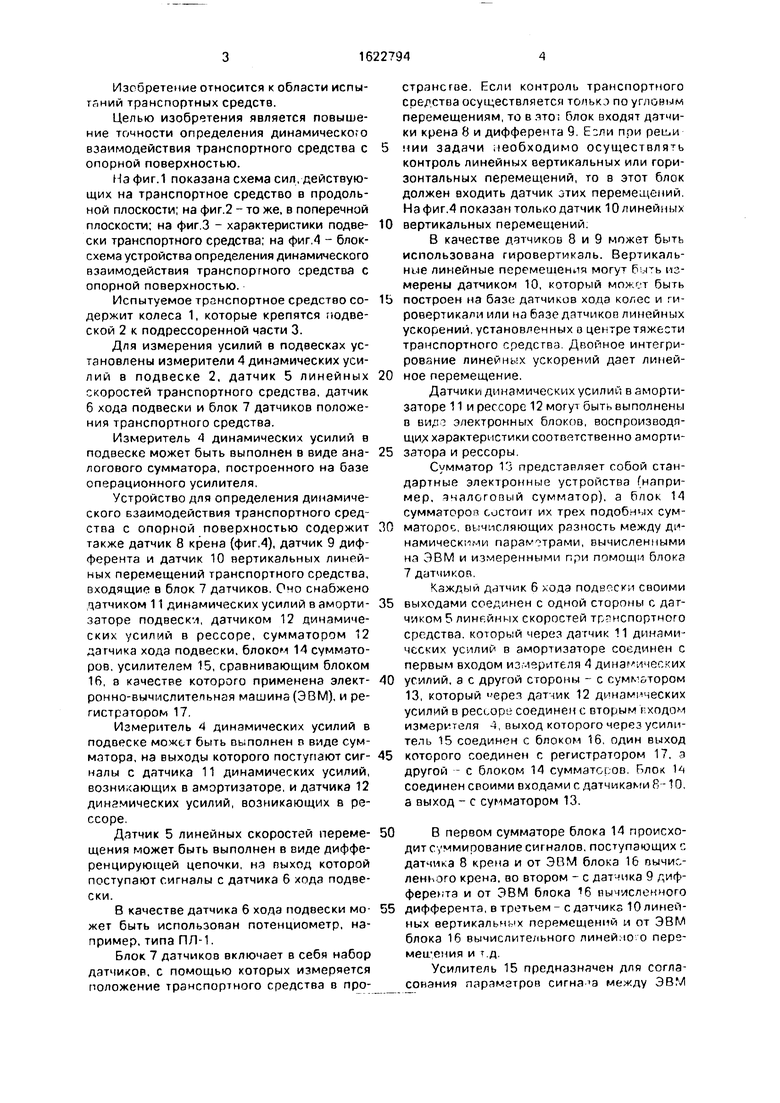

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для предотвращения опрокидывания транспортного средства | 1985 |
|
SU1243963A2 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для измерения профиля местности | 1986 |
|
SU1483259A1 |
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1999 |
|
RU2168146C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
Изобретение касается испытаний транспортных средств. Целью изобретения является повышение точности определения динамического взаимодействия транспортного средства с опорной поверхностью. Эта цель достигается способом определения динамического взаимодействия, реализуемого с помощью устройства, содержащего датчики усилий в рессоре 12 и амортизаторе 11 подвески, а также датчики крена 8, дифферента 9 и вертикальных перемещений 10 транспортного средства. С помощью датчиков 11 и 12 измеряют силовые возмущения в подвеске, а затем корректируют их после измерения положения транспортного средства датчиками 8-10 и обработки этих измерений в блоке 16, содержащем ЭВМ, что позволяет повысить точность определяемых динамических взаимодействий транспортного средства с опорной поверхностью. 2 с.п. и 1 з.п.ф-лы. 4 ил. Чт/ Ё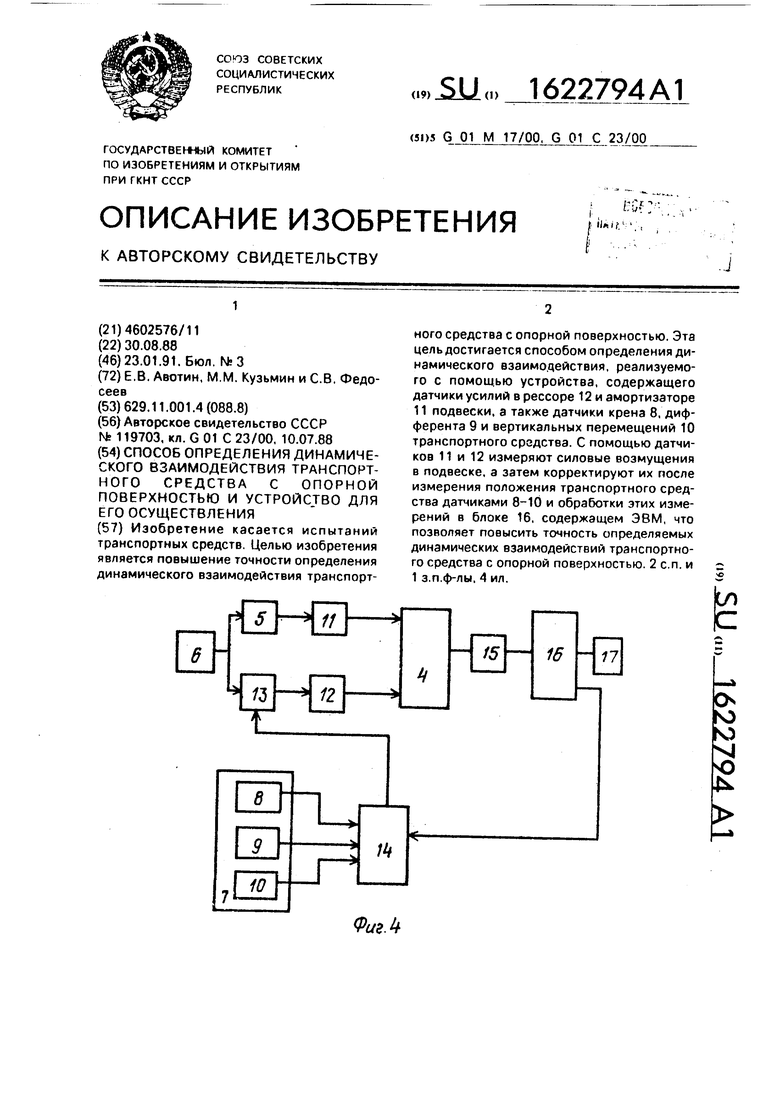
ФигЛ
Изобретение относится к области испытаний транспортных средств.
Целью изобретения является повышение точности определения динамического взаимодействия транспортного средства с опорной поверхностью.
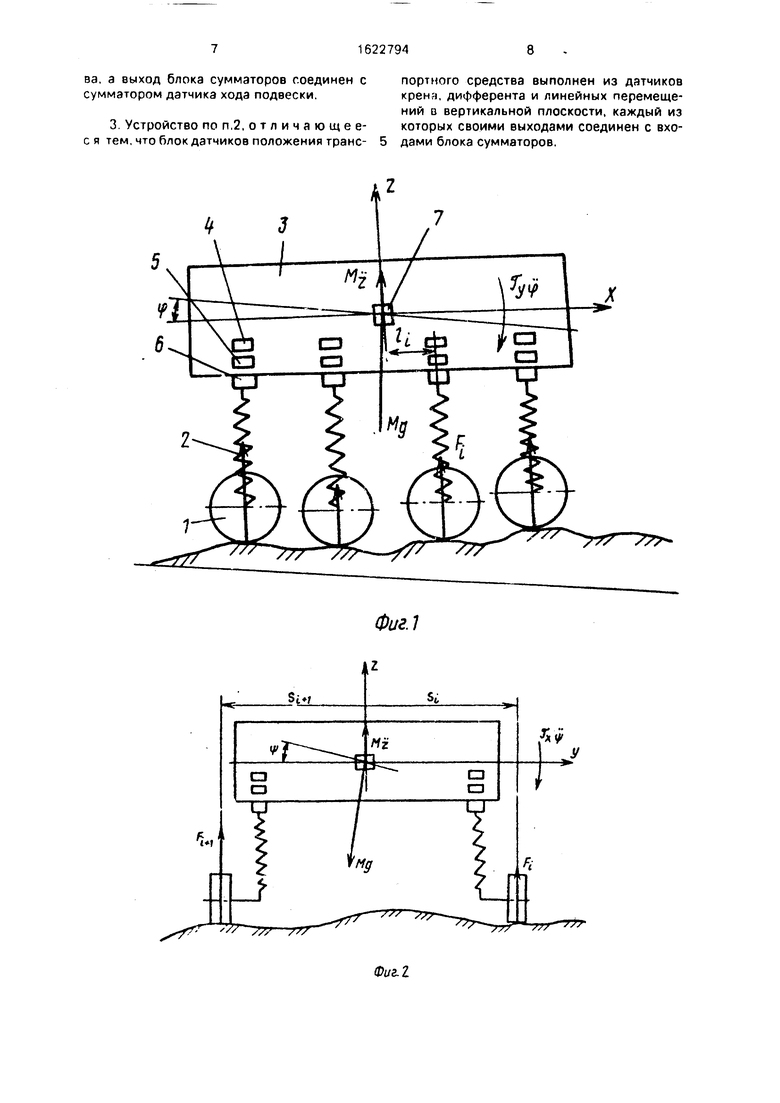
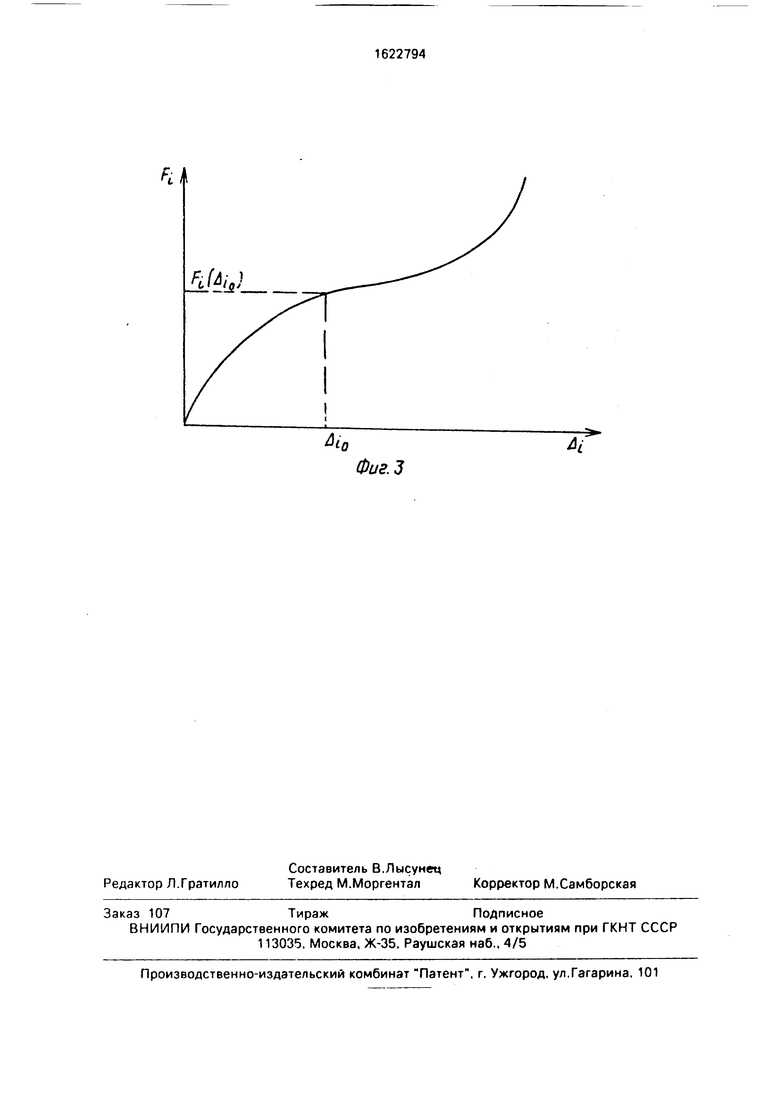
На фиг.1 показана схема сил, действующих на транспортное средство в продольной плоскости; на фиг.2 - то же, в поперечной плоскости; на фиг.З - характеристики подве- ски транспортного средства; на фиг.4 - блок- схема устройства определения динамического взаимодействия транспортного средства с опорной поверхностью.
Испытуемое транспортное средство со- держит колеса 1, которые крепятся подвеской 2 к подрессоренной части 3.
Для измерения усилий в подвесках установлены измерители 4 динамических уси- лий в подвеске 2, датчик 5 линейных скоростей транспортного средства, датчик 6 хода подвески и блок 7 датчиков положения транспортного средства.
Измеритель 4 динамических усилий в подвеске может быть выполнен в виде ана- лотового сумматора, построенного на базе операционного усилителя.
Устройство для определения динамического взаимодействия транспортного средства с опорной поверхностью содержит также датчик 8 крена (фиг,4), датчик 9 дифферента и датчик 10 вертикальных ЛИНРЙ- ных перемещений транспортного средства, входящие в блок 7 датчиков. Оно снабжено датчиком 11 динамических усилий в аморти- заторе подвески, датчиком 12 динамических усилий в рессоре, сумматором 12 датчика хода подвески, блоком 14 сумматоров, усилителем 15, сравнивающим блоком 16, а качестве которого применена элект- ронно-вычмслитепьная машина (ЭВМ), и регистратором 17.
Измеритель 4 динамических усилий в подвеске может быть выполнен в виде сумматора, на выходы которого поступают сиг- налы с датчика 11 динамических усилий, возникающих в амортизаторе, и датчика 12 динамических усилий, возникающих в рессоре.
Датчик 5 линейных скоростей переме- щения может быть выполнен в виде дифференцирующей цепочки, на пыход которой поступают сигналы с датчика 6 хода подвески.
В качестве датчика 6 хода подвески мо- жет быть использован потенциометр, например, типа ПЛ-1.
Блок 7 датчиков включает в себя набор датчиков, с помощью которых измеряется положение транспортного средства в пространстве. Если контроль транспортного средства осуществляется только по угловым перемещениям, то в ято; блок входят датчики крена 8 и дифферента 9. Е;ли при реи,и нии задачи необходимо осуществлять контроль линейных вертикальных или горизонтальных перемещений, то в этот блок должен входить датчик этих перемещений. На фиг.4 показан только датчик 10 линейных вертикальных перемещений.
В качестве датчиков 8 и 9 может быть использована гировертикаль. Вертикальные линейные перемещения могут измерены датчиком 10, который может быть построен на базе датчиков хода колес и гировертикали или на базе датчиков линейных ускорений, установленных о центре тяжести транспортного средства Двойное интегрирование линейных ускорений дает линейное перемещение.
Датчики динамических усилий в амортизаторе 11 и рессоре 12 могу быть выполнены в ви,п электронных блоков, воспроизводящих характеристики соответственно амортизатора и рессоры.
Сумматор 13 предстэрляет собой стандартные электронные устройства (например, аналоговый сумматор), а блок 14 сумматороп состоит их трех подобных сумматоров, вычисляющих разность между динамическими параметрами, вычисленными на ЭВМ и измеренными при помощи блока 7 датчиков.
Каждый датчик 6 хода подвески своими выходами соединен с одной стороны с датчиком 5 линейных скоростей транспортного средства, который через датчик 11 динамических усилий в амортизаторе соединен с первым входом измерителя 4 динамических усилий, а с другой стороны - с сумматором 13, который ерез датчик 12 динамических усилий в рессоре соединен с вторым гходом измерителя 4,выход которого через усилитель 15 соединен с блоком 16, один выход которого соединен с регистратором 17, а другой - с блоком 14 сумматоьов. Блок 14 соединен своими входами с датчиками 8-10, а выход - с сумматором 13.
В первом сумматоре блока 14 происходит суммирование сигналов, поступающих г, датчика 8 крена и от ЭВМ блока 16 вычисленного крена, во втором - с датчика 9 дифферента и от ЭВМ блока 16 вычисленного дифферента, в третьем- сдатчика 10 линейных вертикальных перемещений и от ЭВМ блока 16 вычислительного линей.ю о пере- меа еиия и т.д.
Усилитель 15 предназначен для согласования параметров сигна а между ЭВМ
блока 16 и измерителем 4 динамических усилий в подвеске
ЭВМ блока 16 предназначена для проведения вычислений в соответствии с запрограммированной математической моделью, которая описывает реакцию транспортного средства на внешние возмущения. Регистратор 17 предназначен для записи интересующих параметров, в качестве которого может быть использован осциллограф.
Способ определения динамического взаимодействия осуществляется следующим образом.
При движении транспортного средства сигналы с датчиков 6хода подвески каждого колеса поступают в датчик 5 линейных скоростей, где происходит вычисление соответствующей скорости каждого колеса.
С этого датчика сигнал поступает в датчик 11 динамических усилий в амсртизато ре, формирующий сигнал о величине усилия в амортизаторе в зависимости от гимейной скорости колеса Кроме того, с датчика 6 сигналы через сумматор 13 поступают в датчик 12 динамических усилий в рессоре, который формирует сигналы о величине усилия, возникающего в рессоре из-за его деформации.
В датчиках 11 и 12 по величине соответствующего сигнала определяются соотсетгт- венно усилия, возникающие в амортизаторе и рессоре. Сигналы с датчиков 11 и 12 поступают в измеритель 4, где происходит их суммирование, т.е. определение усилия в подвеске каждого колеса, вь званного взаимодействием с рельефными образованиями и колебаниями подрессоренной части транспортного средства. Затем си-нал с измерителя 4 через усилитель 15 поступает в блок 16, в котором происходит решение заранее запрограммированной системы уравнений, описывающих реакцию транспортного средства на внешние возмущения, т е. осуществляется моделирование движения транспортного средства для определения его реакций на рельефные образования
Вычисленные в ЭВМ блока 16 значения положений транспортного средства в пространстве, например, по угловым и линейным перемещениям поступают в блок 14 сумматоров, где вычисленные параметры транспортного средства, характеризующие его положение в пространстве, алгебраически складываются с соответствующими фактическими параметрами транспортного средства, измеренными с помощью датчиков крена 8, дифферента 9 и линейного вер- тикального перемещения 10 Затем соответствующие суммы сигналон из блока
14 поступают в сумматор 13, где они дополнительно алгебраически складываются с
оиг налами, покупающими с датчика 6 хода подгески С сумматора 13 сигналы через
соответствующие блоки поступают снова в ЭВМ блока 16
Сигналы, которые поступают в ЭВМ блока 16 из блока 14 сумгаторов, позволяют уменьшить ошибку возникающую за счет
0 неточности измерений и неточности мате- м тической модели запрограммированной ri ЭРМ I повысить темность олредбпенря динамического взии деиствия транспортного средства с one рной поверхностью
5Формула изобретения
I. Способ огмеделгния динамического взлимодеме вич транспортного средства с ос.зоной поверхностью путем измерения в процессе его движении силовых возмуще0 ний Б подвеске, отличающийся тем, что, с цел о псвчше - л точности измеряют фактическое положение транспортного средства, с измеренным силовым возмущениям огрг Л лпют теоретическое положе5 ние трансы.;)1 ного средства, которое сравнивают с фактическим положением, по полученной разности определяют дополнительные силовые ВОЗМУЩЕНИЯ и, суммируя их, определяют фактические силовые возму0 щения в подвеске
2 Устройство для определения динамического взаимодействия транспортного средств с опорной поверхностью, содержащее датшки динамических усилий, уси5 литегр и регистратор, отличающееся тем что оно г.Нс бжено датчиками хода подвести датчиком г.ипо чных скоростей транспортного средства, блоком дат шков .положения тргн-поотного средства, блоком
0 сумматоров, сравнивающим блоком, сумматором датч,; к а хода подвески и измерителем динамических усилий, в подвеске, при этом датчики динамических усилий установлены в амортизаторе и рессоре подвески трэнс5 портного средства, каждый датчик хода подвески своими выходами соединен с одной стороны с датчиком линейных скоростей транспортного средства который через датчик динамически/, усилий в амортизаторе
0 соединен с первым входом измерителя динамических усилий в подвеске а с другой стороны - с с /ммзтором, который через датчик динамических усилии Б рессоре соединен с вторым входом измерителя динамических
5 усилий в подвеске, выход которого через усилитель соединен со сравнивающим блоком, один выход которого соединен с регистратором, а другой - с блоком сумматоров соединенного другими своими входами с блоком датчиков положения транспортного средства, а выход блока сумматоров соединен с сумматором датчика хода подвески.
3 Устройство по п,2, отличающеес я тем, что блок датчиков положения транс- 5 дами блока сумматоров,
портного средства выполнен из датчиков крена, дифферента и линейных перемещений в вертикальной плоскости, каждый из которых своими выходами соединен с вхоФиг.1
Fi
Ј/4в J
Ai
to
Ai
Фиг.З
| Способ определения динамического взаимодействия пути и подвижного состава по силовым факторам и устройство для осуществления способа | 1958 |
|
SU119703A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
