1
Изобретение относится к машиностроению, а именно к прог ишленным роботам, предназначенным повторять заданную схему перемещений рабочего органа,.заложенную в память системы автоматического управления.
Известен промышленный робот, содержащий основание, шарнирно сочлененные звенья, силовые цилиндры, кинематически связанные с соответствующими звеньями, и систему программного управления l Недостатком известного робота является его низкая точность позиционирования.
Цель изобретения - повышение точности позиционирования робота.
Цель достигается тем, что робот снабжен осями, смонтированными шарнирно в корпусе силового цилиндра, рычагами, каждый из которых шарнирно соединен одним концом с указанной осью, а другим концом - с основанием, а также фиксирующими устройствами, установленными в основании.
При этом каждое фиксирующее устройство выполнено в виде упора с золотником, установленного с возможностью взаимодействия с корпусом силового цилиндра, и двух подпружиненных поршней, расположенных по обе стороны корпуса этого силового цилиндра соосно его шарнирной оси.
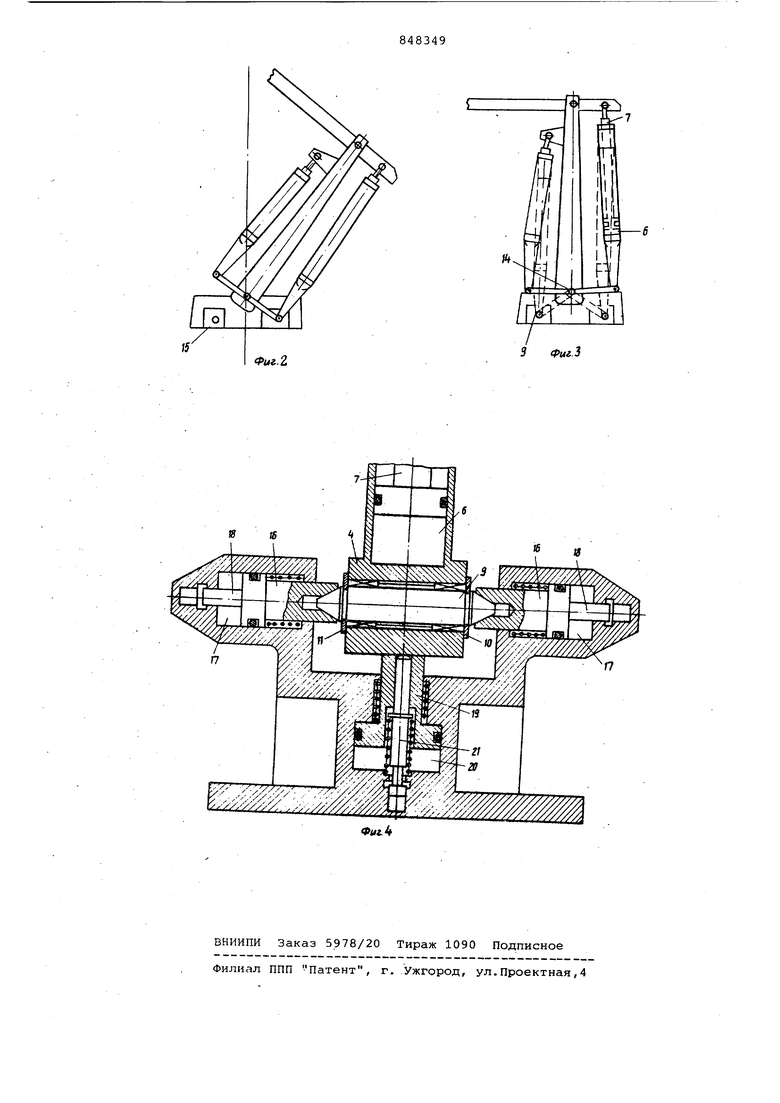
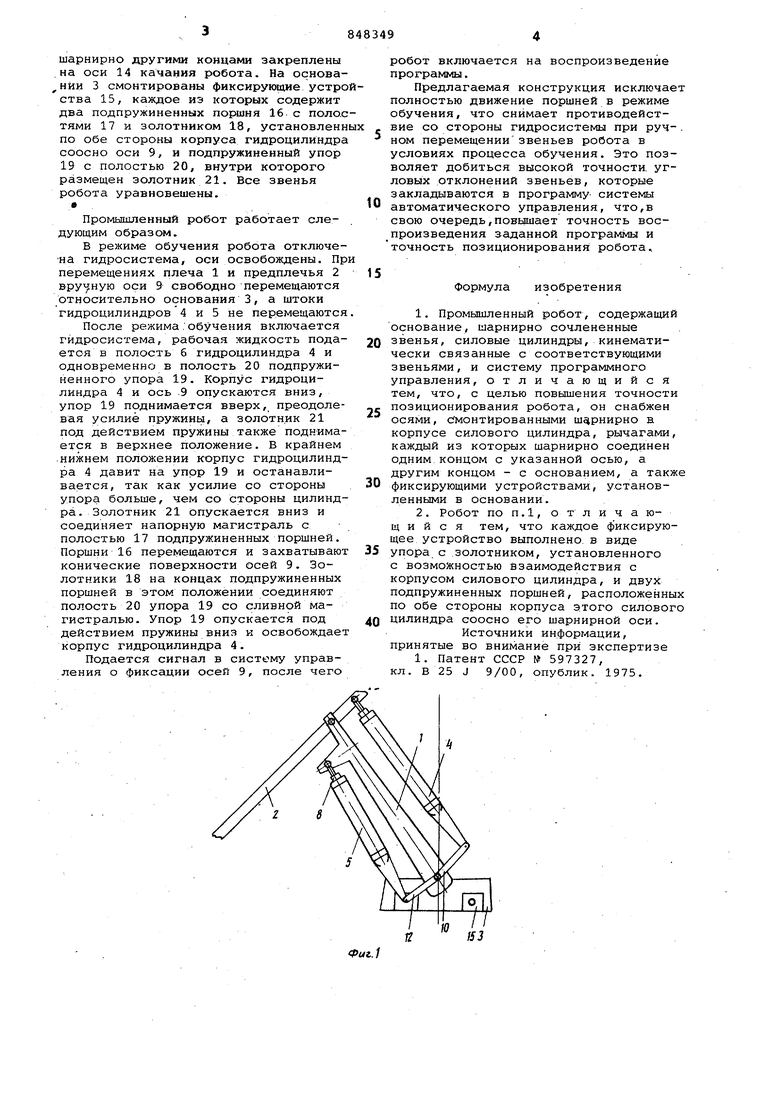
На фиг. 1 показано положение цилиндров и их штоков при отклонении плеча в крайнее левое положение| на фиг. 2 - то же, при отклонении в крайнее правое положение на фиг. 3 - то же, в
10 промежуточной позиции (пунктиром в режиме автоматического воспроизведения программы); на фиг. 4 - пример конструкции фиксирующего устройства (в положении фиксации).
15
Промышленный робот содержит исполнительный орган, выполненный из шарнирио сочлененных звеньев,, силовых цилиндров и системы программного управления (не показана). Исполни20тельный орган в виде плеча 1, предплечья 2 смонтирован на основании 3 вместе с корпусами силовых цилиндров, например гидроцилиндров 4 и 5 с полостями 6. Штоки 7 и 8 гидроцилин25дров шарнирно соединены соответственно с плечом 1 и предплечьем 2. Корпуса гидроцилиндров 4 и 5 соединены каждый шарнирно посредством осей 9 с концами двух пар рычагов 10, 11 и 30 12, 13 (рычаг 13 не показан), которые шарнирно другими концаьш закреплены на оси 14 качания робота. На основа,нии 3 смонтированы фиксирующие устро ства 15, каждое из которых содержит два подпружиненных поршня 16 с полос тями 17 и золотником 18, установленн по обе стороны корпуса гидроцилиндра соосно оси 9, и подпружиненный упор 19 с полостью 20, внутри которого размещен золотник 21. Все звенья робота уравновешены. Промышленный робот работает следующим образом. В режиме обучения робота отключена гидросистема, оси освобождены. Пр перемещениях плеча 1 и предплечья 2 вручную оси 9 свободно перемещаются относительно основания 3, а штоки гидроцилиндров 4 и 5 не перемещаются После режима.обучения включается гидросистема, рабочая жидкость подается в полость б гидроцилиндра 4 и одновременно в полость 20 подпружиненного упора 19. Корпус гидроцилиндра 4 и ось 9 опускаются вниз, упор 19 поднимается вверх, преодолевая усилие пружины, а золотник 21 под действием пружины также поднимается в верхнее положение. В крайнем .нижнем положении корпус гидроцилиндра 4 давит на упор 19 и останавливается, так как усилие со стороны упора больше, чем со стороны цилинд ра. Золотник 21 опускается вниз и соединяет напорную магистраль с полостью 17 подпружиненных поршней. Поршни 16 перемещаются и захватывают конические поверхности осей 9. Золотники 18 на концах подпружиненных поршней в этом положении соединяют полость 20 упора 19 со сливной магистралью. Упор 19 опускается под действием пружины вниз и освобождае корпус гидроцилиндра 4. Подается сигнал в систему управления о фиксации осей 9, после чего робот включается на воспроизведение программы. Предлагаемая конструкция исключает полностью движение поршней в режиме обучения, что снимает противодействие со стороны гидросистемы при руч-. ном перемещении звеньев робота в условиях процесса обучения. Это позволяет добиться высокой точности, угловых отклонений звеньев, которые закладываются в программу системы автоматического управления, что,в свою очередь,повьлиает точность воспроизведения заданной программы и точность позиционирования робота.. Формула изобретения 1.Промышленный робот, содержащий основание, шарнирно сочлененные звенья, силовые цилиндры, кинематически связанные с соответствующими звеньями, и систему программного управления, отличающийся тем, что, с целью повьдшения точности позиционирования робота, он снабжен осями, сЛуюнтйрованными шарнирно в корпусе силового цилиндра, рычагами, каждый из которых шарнирно соединен одним концом с указанной осью, а другим концом - с основанием, а также фиксирующими устройствами, установленными в основании. 2.Робот по П.1, о тл и ч а ющ и и с я тем, что каждое фиксирующее устройство выполнено в виде упора с золотником, установленного с возможностью Взаимодействия с корпусом силового цилиндра, и двух подпружиненных поршней, расположенных по обе стороны корпуса этого силового цилиндра соосно его шарнирной оси. Источники информации, принятые во внимание при экспертизе 1. Патент СССР № 597327, кл. В 25 J 9/00, опублик. 1975.
3 ФнгЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 1984 |
|
RU1304292C |
| Промышленный робот | 1980 |
|
SU931463A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Модуль шарнира | 1980 |
|
SU980979A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
| Гидравлическая система программного управления стрелой горной машины | 1983 |
|
SU1218099A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |