Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, рабочий орган которых состоит шарнирно сочлененных звеньев.
Известен модуль шарнира, содержащий корпус, неполноповоротный силовой цилиндр, связанный со звеном, например, манипулятора, и золотник с приводом t- Недостатком известного.модуля является низкая точность позиционирования и фиксации промежуточных положений элементов модуля..
Цель изобретения - повышение точности позиционирования и жесткости фиксации промежуточных положений элементов модуля.
Указанная цель достигается тем, что модуль шарнира снабжен расположенной на корпусе подпружиненной относительно него тормозной колодкой, установленной с возможностью взаимодействия с корпусом моментного силового цилиндра, а в валу этого цилиндра выполнена полость, в которой смонтирован долотник с приводом.
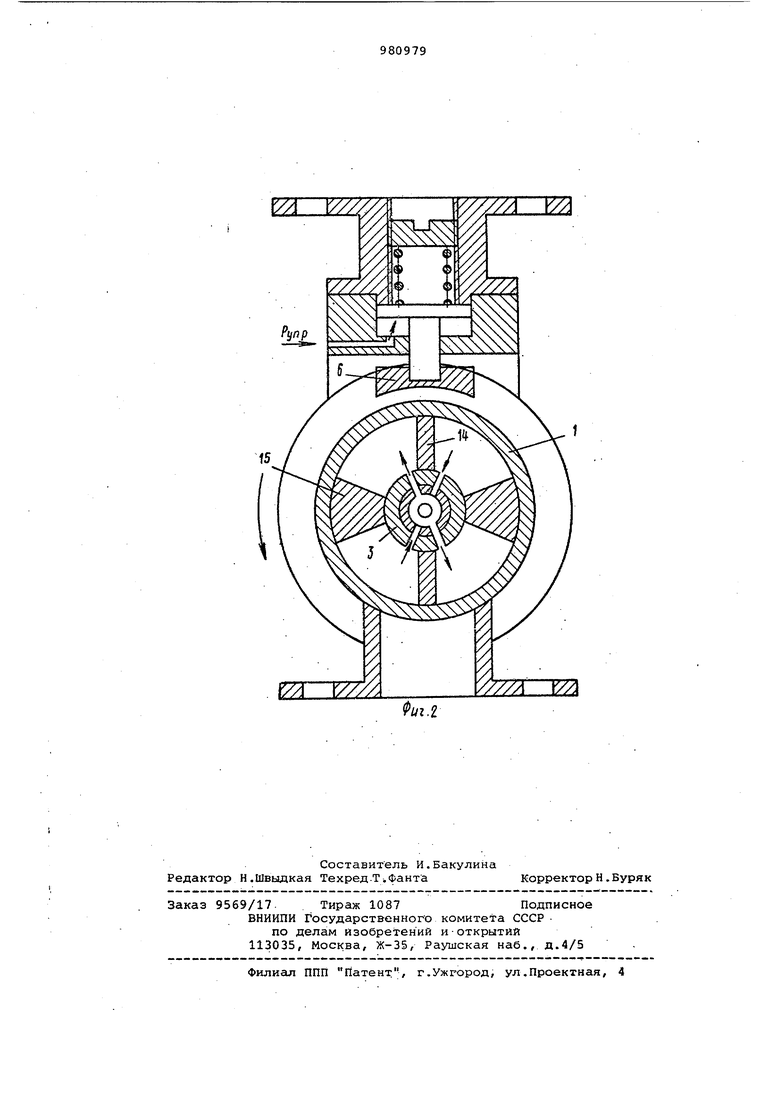
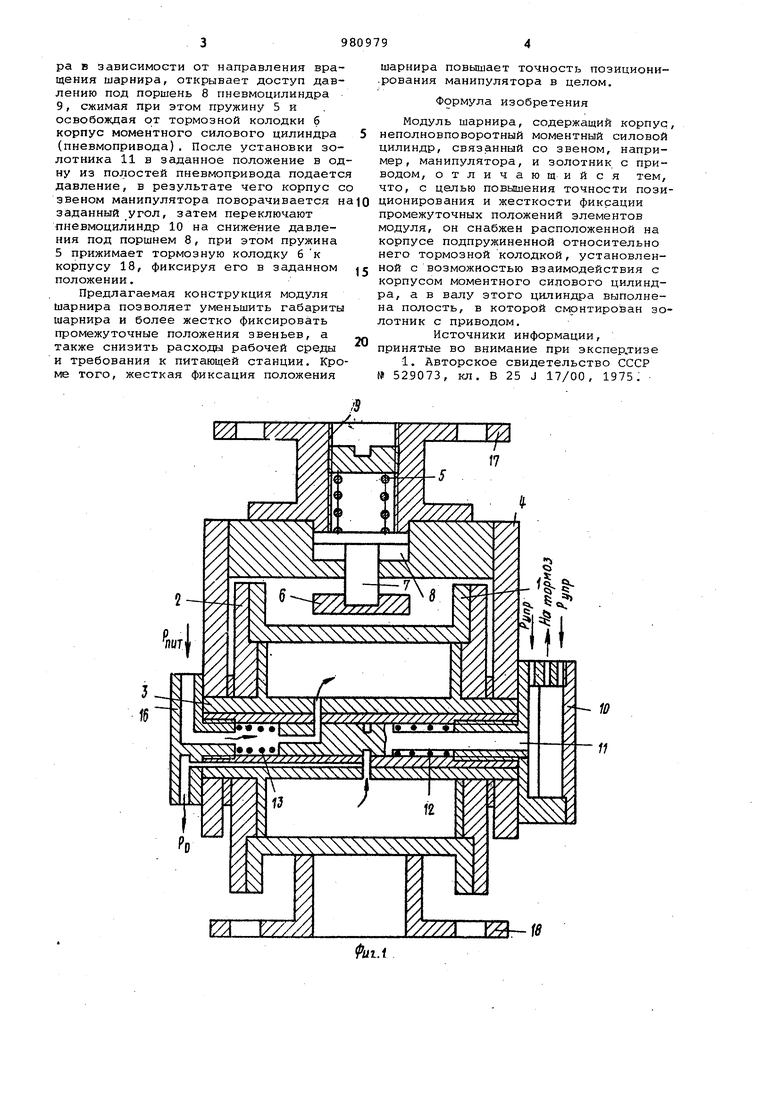
На фиг.1 изображен модуль шарнира, продольный разрез, на фиг.2 то же, поперечный разрез.
Модуль шарнира манипулятора состоит из корпуса 1, который жестко co-i единен с крышками 2, установленными подвижно на валу 3 моментного силового цилиндра, на котором жестко закреплена щека 4. К корпусу 1 с помощью пружины 5 прижата тормозная колодка 6, кроме того, имеется шток 7, который соединен с поршнем 8, а пневмоцилиндр 9 сообщен с пневмоцилиндром 10 золотника 11, встроенного в полость вала 3 моментного цилиндра и удерживаемого в нейтральном положении пружинами 12 и 13. Полость моментного силового цилиндра разделена на части лопастями 14 и упорами 15, каждая из которых попеременно сообщается с питаквдей сетью 16. На щеке 4 и корпусе 1 закреплены присоединительные фланцы 17 и 18. Тормозная колодка 6 устанавливается с возможностью взаимодействия с корпусом моментного силового цилиндра.
Устройство работает следующим образом.
При подаче давления в пневмоцилиндр 10 золотника 11 поршень его, перемещая золотник 11 в заданное положение для подачи давления в одну И31 полостей моментного силового дилиндpa в зависимости от направления вращения шарнира, открывает доступ давлению под поршень 8 пневмоцилиндра 9, сжимая при этом пружину 5 и освобождая от тормозной колодки б корпус моментного силового цилиндра (пневмопривода). После установки золотника 11 в заданное положение в од ну из полостей пневмопривода подаетс давление, в результате чего корпус с звеном манипулятора поворачивается н заданный угол, затем переключают пневмоцилиндр 10 на снижение давления под поршнем 8, при этом пружина 5 прижимает тормозную колодку 6 к корпусу 18, фиксируя его в заданном положении. Предлагаемая конструкция модуля Шарнира позволяет уменьшить габариты шарнира и более жестко фиксировать промежуточные положения звеньев, а также снизить расходы рабочей среды и требования к питающей станции. Кро ме того, жесткая фиксация положения шарнира повышает точность позициони.рования манипулятора в целом. Формула изобретения Модуль шарнира, содержащий корпус, неполновповоротный моментный силовой цилиндр, связанный со звеном, например, манипулятора, и золотник с приводом, отличающийся тем, что, с целью повышения точности позиционирования и жесткости фиксации промежуточных положений элементов модуля, он снабжен расположенной на корпусе подпружиненной относительно него тормозной колодкой, установленной с возможностью взаимодействия с корпусом моментного силового цилиндра, а в валу этого цилиндра выполнена полость, в которой смонтирован золотник с приводом. Источники информации, принятые во внимание при экспер.тизе 1, Авторское свидетельство СССР № 529073, кп. В 25 J 17/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1991 |
|
SU1776556A1 |
| Модуль манипулятора | 1987 |
|
SU1512763A1 |
| Линейный модуль манипулятора | 1984 |
|
SU1207753A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Манипулятор для доения | 1985 |
|
SU1273038A1 |
| Система включения преимущественно для кривошипных прессов | 1981 |
|
SU1085329A1 |
| Кран-манипулятор | 1987 |
|
SU1481194A2 |
| Позиционный пневмопривод | 1982 |
|
SU1090936A1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |