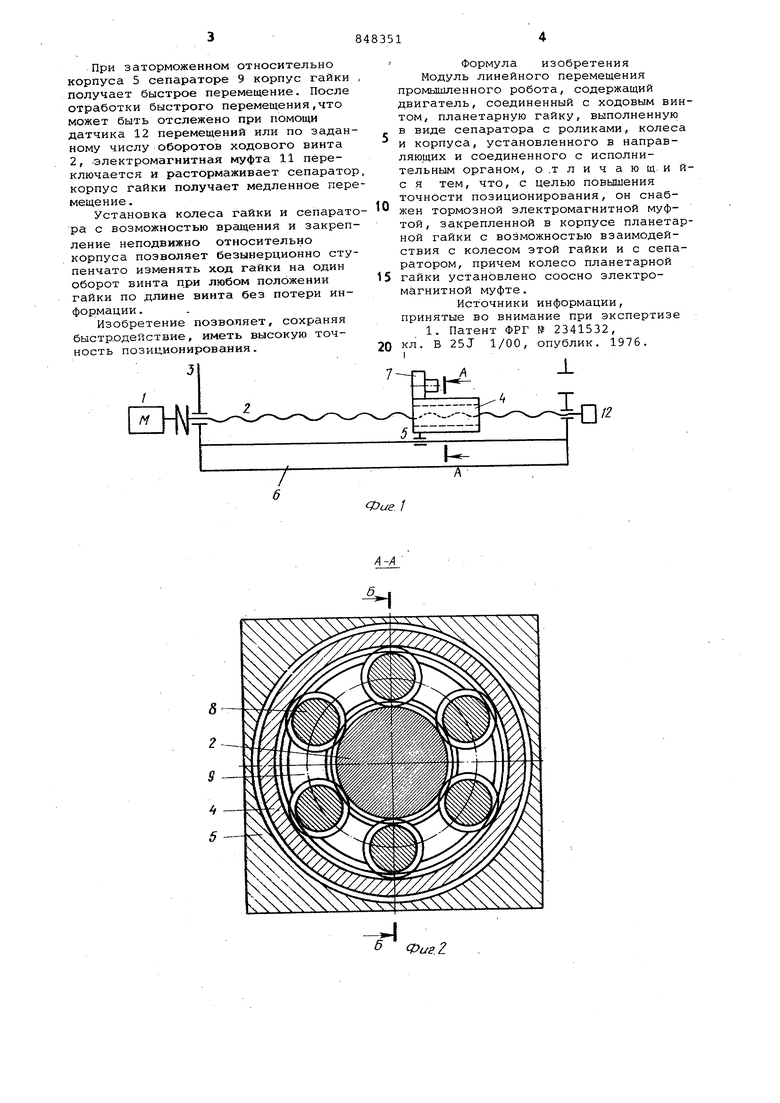
Изобретение относится к машиностр е.нию, в частности к промышленным .роботам. известен модуль линейного перемещения промышленного робота,содержащий двигатель, соединенный с ходовым винтом, планетарную гайку, выполненную в виде сепаратора с роликами, колеса и корпуса, установленного в направляющих и соединенного с исполнительным органом 1 . Недостатком такого модуля является низкая точность позиционирования. Цель изобретения - повышение точности позиционирования. Цель достигается тем, что модуль пинейного перемещения промышленного робота снабжен тормозной электромагнитной муфтой, закрепленной в корпусе планетарной гайки с возможностью взаимодействия с колесом этой гайки с сепаратором, причем колесо планетарной гайки установлено соосно электромагнитной муфте. На фиг. 1 изображена схема модул линейного перемещения промышленного робота; на фиг.2 - сечение А-А на фиг.1; на фиг. 3 - сечение Б-Б на фиг.2. Модуль линейного перемещения про мышленного робота содержит приводной .двигатель 1, соединенный муфтой с ходовым винтом 2, установленн ым в каретке 3. Во винту перемещается планетарная гайка 4 качения с резьбовыми роликами, корпус 5 которой установлен в направляющих 6 и соединен с перемещаемым исполнительным органом или промежуточным звеном 7. Колесо гайки 4 (фиг.2) охватывает набор расположенных вокруг винта 2 резьбовых роликов-сателлитов 8, закрепленных в сепараторе 9, перекатывающихся по винту и колесу гайки 4 . Колесо гайки 4 установлено в подшипниках 10 (фиг. 3), закрепленных в корпусе 5, в котором закреплена двухсторонняя электромагнитная тормозная муфта 11, взаимодействующая с сепаратором и колесом гайки. При заторможенном сепараторе колесо расторможено н наоборот. На другом конце ходового винта может устанавливаться датчик 12 перемещения (при использовании шагового привода его установка необязательна). Модуль работает следующим образом.
При заторможенном относительно корпуса 5 сепараторе 9 корпус гайки получает быстрое перемещение. После отработки быстрого перемещения,что может быть отслежено при помощи датчика 12 перемещений или по заданному числу оборотов ходового винта 2, электромагнитная муфта 11 переключается и растормаживает сепаратор корпус гайки получает медленное перемещение .
Установка колеса гайки и сепаратора с возможностью вращения и закрепление неподвижно относительно корпуса позволяет безынерционно ступенчато изменять ход гайки на один оборот винта цри любом положении гайки по длине винта без потери информации .
Изобретение позволяет, сохраняя быстродействие, иметь высокую точность позиционирования.
Формула изобретения Модуль линейного перемещения промышленного робота, содержащий двигатель, соединенный с ходовым винтом, планетарную гайку, выполненную в виде сепаратора с роликами, колеса и корпуса, установленного в направляющих и соединенного с исполнительным органом, о .т л и ч а ю щ и йс я тем, что, с целью повьпиения точности позиционирования, он снабжен тормозной электромагнитной муфтой, закрепленной в корпусе планетарной гайки с возможностью взаимодействия с колесом этой гайки и с сепаратором, причем колесо планетарной
5 гайки установлено соосно электромагнитной муфте.
Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 2341532,
0 кл. В 25J 1/00, опублик. 1976.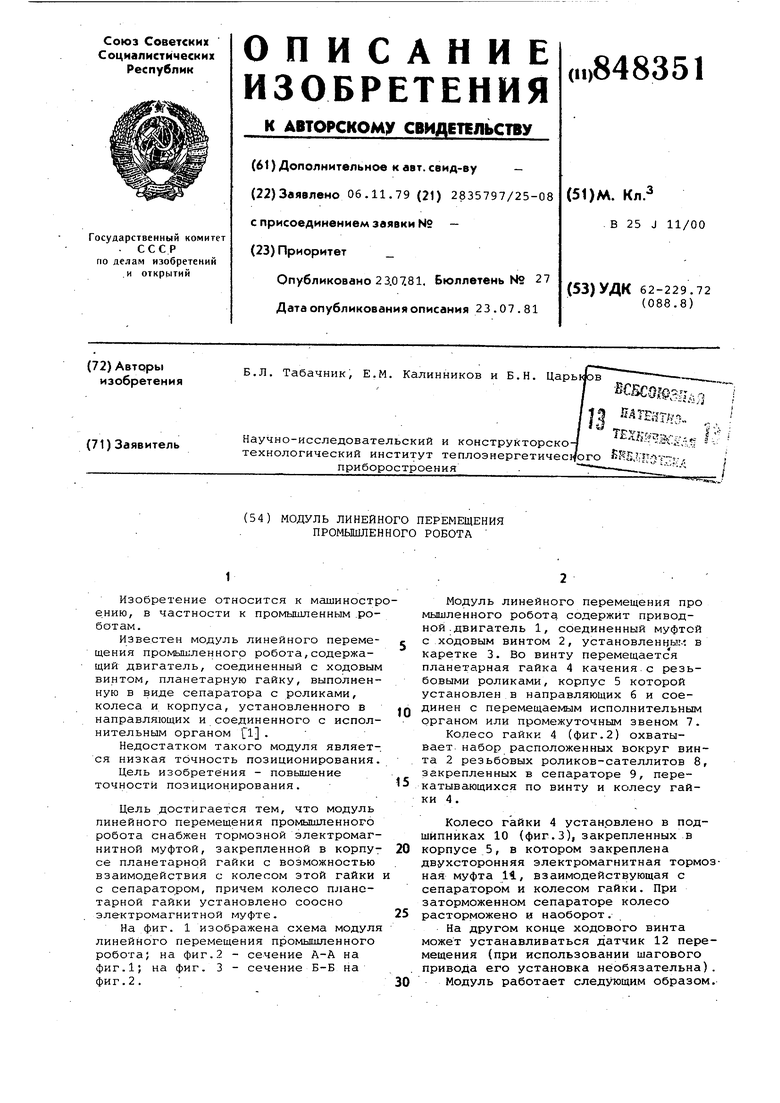
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1980 |
|
SU965762A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Модуль промышленного робота | 1979 |
|
SU831606A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
| Устройство для позиционирования исполнительного органа станка | 1982 |
|
SU1060417A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Модуль манипулятора | 1987 |
|
SU1475778A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |

6-6
