Изобретение относится к машиностроению и может быть использовано в робототехнике, станках с ЧПУ.
Целью изобретения являются повышение грузоподъемности, точности позиционирования за счет снижения массы и габаритов модуля и снижение шума при работе.
На чертеже показан модуль манипу- лятора, продольный разрез.
Модуль манипулятора включает корпус 1, в котором расположено выходное звено 2, связанное с жестким колесом 3 волновой передачи, зацеплен- ным с гибким колесом 4, неподвижно закрепленным на крышке 5, связанной с корпусом 1. Внутри гибкого колеса 4 расположен кулачковый генератор волн, состоящий из гибкого подшипни- ка 6, насаженного на кулачок 7. Б кулачке 7 выполнена расточка, являющаяся обоймой реверсивной обгонной муфты, включающей ролики 8, звездочку 9 и сепаратор 10. В сепараторе 10 имегг ется косой паз, по которому перемещается штифт 11, установленный в якоре 12. На радиально противоположной стороне якоря 12 предусмотрен продольный паз, который является направляю- щей для штифта 13, закрепленного в корпусе гайки 14 шариковой винтовой передачи, включающей шарики 15 и винт 16. Гайка 14 установлена на ра- диально-упорных подшипниках 17 и 18. Подшипник 17 смонтирован внутри выходного звена 2, подшипник 18 установлен в стакане 19, неподвижно закрепленном на крышке 5. На крышке 5 также монтируется соленоид 20 элек- тромагнитной муфты и корпус двигателя, выполненного в виде гидроцилиндра 21. Внутри гидроцилиндра 21 установлен поршень 22, являющийся выкатываться по винтовой канавке. Кинематически связанная с винтом 16 посредством шариков 15 гайка 14, перемещение которой в осевом направлении ограничено подшипниками 17 и 18 .вращается. При этом звездочка 9, жестко закрепленная в расточке гайки 14, также совершает вращение. Ролики 8 передают вращающий момент кулачковому генератору волн волновой передачи. За счет деформирования гибкого колеса 4 находящееся в зацеплении жесткое колесо 3 начинает вращаться и приводит в движение соединенное с ним выходное звено 2.
При необходимости реверсирования вращения выходного звена 2 на соленоид 20 подается напряжение, одновременно под давлением подводится масло в другую полость гидроцилиндра 21 что вызывает обратный ход винта 16 и реверсирование вращения гайки 14, а также связанной с ней звездочки 9.
После подачи напряжения на соленоид 20 якорь 12, связанный с гайкой 14 по скользящей посадке, совершает поступательное движение. При этом закрепленный на якоре штифт 11 вызывает поворот сепаратора 10, который переключает ролики 8 из прямого хода на -обратный. Соответственно генератор волн и выходное звено 2 получают противоположное вращение.
Формула изобретения
Модуль манипулятора, содержащий , корпус, выходное звено, установленный в корпусе двигатель, выходной элемент которого кинематически свЪ- зан с генератором волн волновой передачи, а его жесткие колеса связаны с выходным звеном, и электромагнит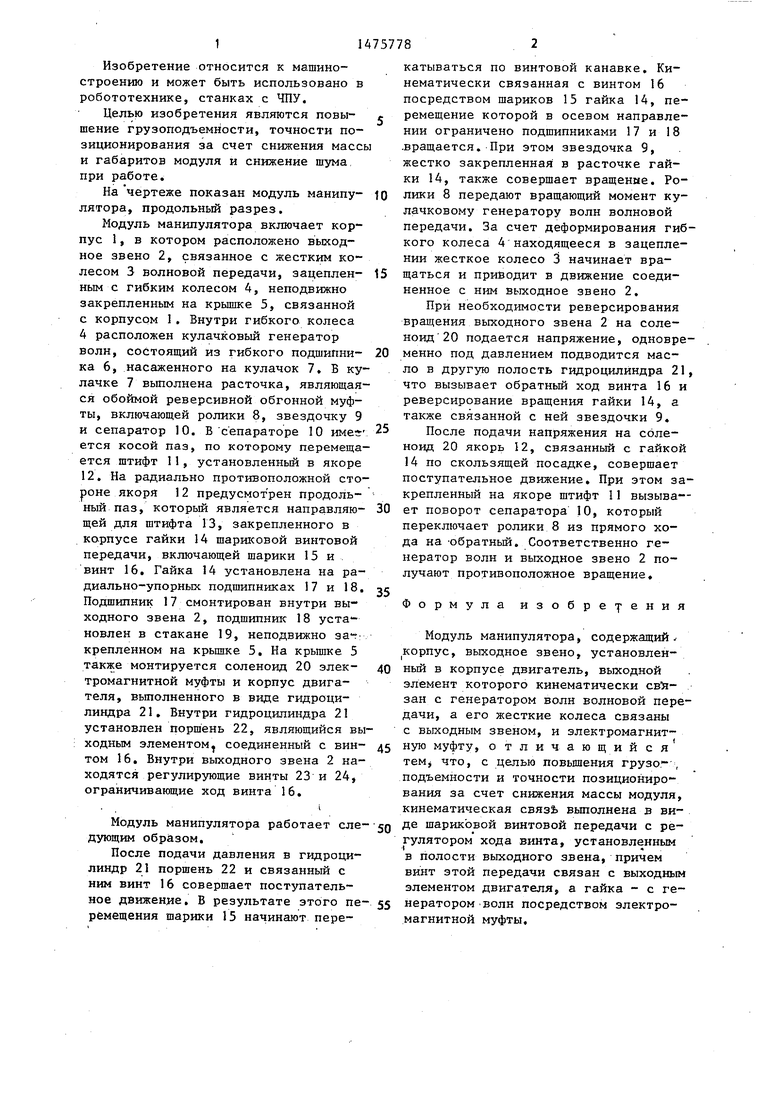
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Способ изготовления и сборки/разборки волновой передачи и устройство для их осуществления в герметичном и негерметичном её исполнениях Абрамова В.А. | 2015 |
|
RU2617007C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
Изобретение относится к машинострению и может быть использовано в робототехнике, станках с ЧПУ. Целью изобретения является повышение грузоподъемности, точности позиционирования за счет снижения массы и габаритов модуля и снижение шума при работе. Для этого в сепараторе 10 имеется косой паз, по которому перемещается штифт 11, установленный в якоре 12. На радиально противоположной стороне якоря 12 предусмотрен продольный паз, который является направляющей для штифта 13, закрепленного в корпусе гайки 14 шариковой винтовой передачи, включающей шарики 15 и винт 16. Гайка 14 установлена на радиально-упорных подшипниках 17 и 18. На крышке 5 монтируется соленоид 20 электромагнитной муфты и корпус двигателя (гидроцилиндра) 21. Внутри гидроцилиндра 21 установлен поршень 22, являющийся выходным элементом, соединенный с винтом 16. 1 ил.
ходным элементомt соединенный с вин- д5 НУЮ МУФТУ отличающийся
том 16. Внутри выходного звена 2 находятся регулирующие винты 23 и 24, ограничивающие ход винта 16.
тем, что, с целью повышения грузо- , подъемности и точности позиционирования за счет снижения массы модуля, i кинематическая связь выполнена в виМодуль манипулятора работает еле- 50 де шариковой винтовой передачи с ре- дующим образом.гулятором хода винта, установленным
После подачи давления в гидроци- в полости выходного звена, причем линдр 21 поршень 22 и связанный с винт этой передачи связан с выходным ним винт 16 совершает поступатель- элементом двигателя, а гайка - с ге- ное движение. В результате этого пе- 55 нератором волн посредством электро- ремещения шарики 15 начинают пере- магнитной муфты.
| Модуль промышленного робота | 1985 |
|
SU1294600A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
