(5А) ТОЛКАТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ВАГОНЕТОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Толкатель двустороннего действия | 1983 |
|
SU1095024A1 |
| Механизм для перемещения вагонеток | 1982 |
|
SU1133105A1 |
| Толкатель вагонеток | 1982 |
|
SU1041851A1 |
| Толкатель вагонеток | 1981 |
|
SU1019205A1 |
| Толкатель | 1985 |
|
SU1296816A1 |
| Толкатель для перемещения вагонеток | 1979 |
|
SU879232A1 |
| Вертикально-замкнутый тележечный конвейер | 1982 |
|
SU1077828A1 |
| Толкатель вагонеток | 1982 |
|
SU1041852A1 |
| Механизм для перемещения вагонеток | 1986 |
|
SU1320134A1 |
| Двухъярусная конвейерная линия для изготовления строительных изделий | 1978 |
|
SU992188A1 |
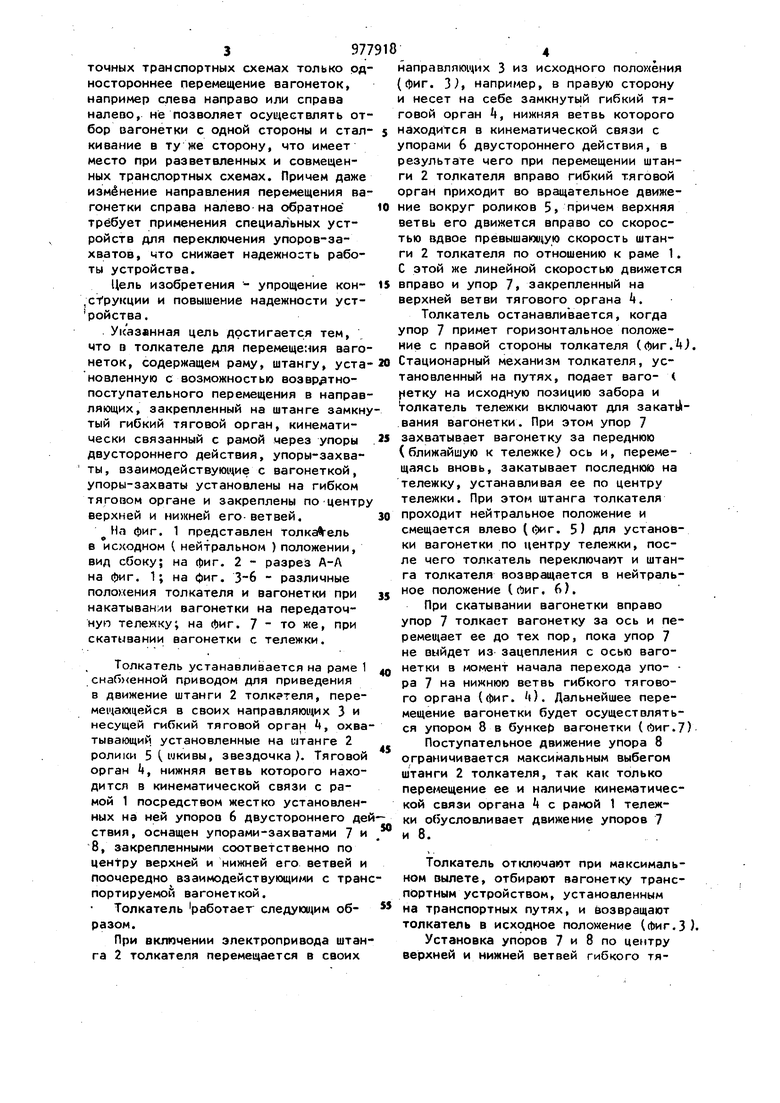
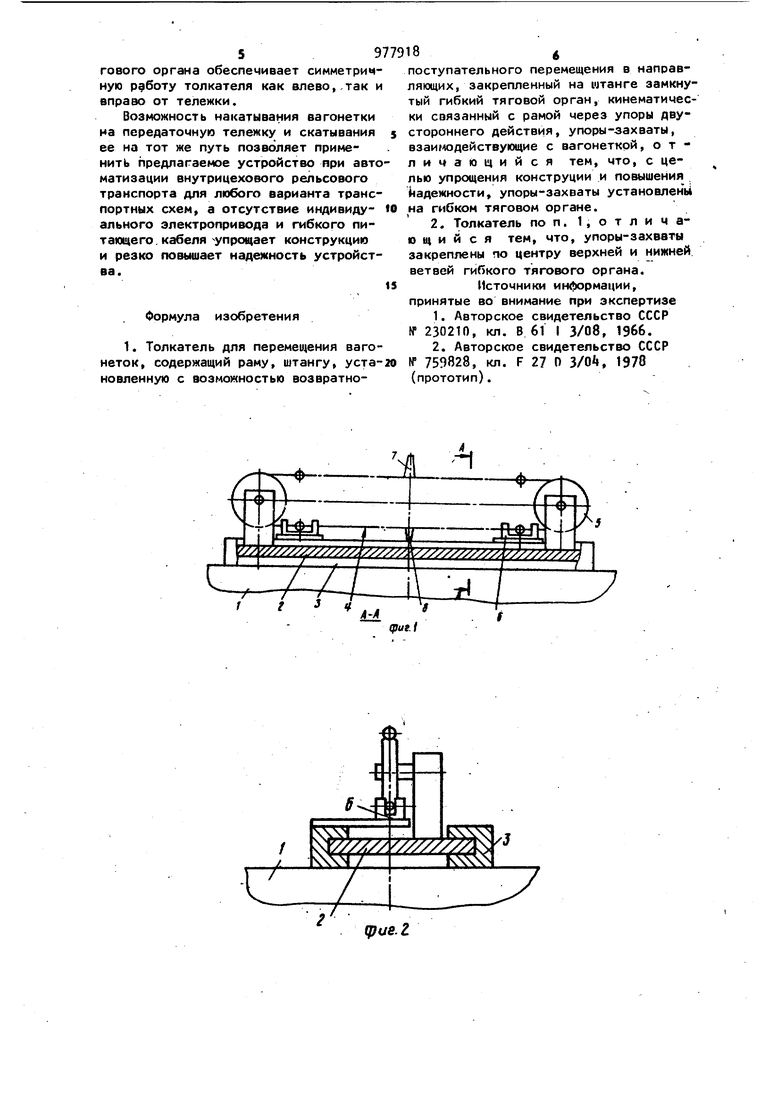
Изобретение относится к промышленности строительных материалов и может быть использовано, в частности, в производстве глиняного и силикатного кирпича для перемещения вагонеток по технологическим потокам, а также для загрузки-выгрузки сушил, печей или автоклавов. Известен толкатель перестановочной плат()юрмы, обеспечивающий накатывание вагонеток на передаточную тележку с обеих ее сторон и скатывание их на обе стороны, приводная цепь с захватным кулачком которого смонтирована на штанге, выдвигаемой в обе стороны на половину своей длины, равной ширине плат(|юрмы тележки, и выполнена бесконечной 1.Недостатком этого устройства является то, что смонтированная наштан-. ге бесконечная цепь с захват-ным кулачком приводится в действие индивидуальным приводом, размещенным на той же подвижной штанге, поэтому питание электродвигателя привода осуществляется по гибкому кабелю. Такое решение усложняет конструкцию толкателя, увеличивает его габариты и резко снижает надежность работы устройства изза механических повреждений кабеля. Наиболее близким к предлагаемому, является толкатель, обеспечивающий накатывание вагонетки на передаточную тележку и скатывании ее за один Ход толкателя, содержащего закреплённые на верхнем звене телескопической двухступенчатой штанги толкателя упоры двустороннего действия и прикрепленные к раме неподвижные упоры двустороннего действия, взаимодействующие с соответствуищими ветвями гибкого тягового органа, несомого нижним звеном штанги толкателя, причем верхнее звено оснащено упорами-захватлми, взаимодействую1чими с вагонеткой С 2 . Недостатком устройства является то, что оно, обеспечивая в прямоточных транспортных схемах только од ностороннее перемещение вагонеток, например слева направо или справа налево, не позволяет осуществлять от бор аагонетки с одной стороны и стал кивание в ту же сторону, что имеет место при разветвленных и совмещенных транспортных схемах. Причем даже изменение направления перемещения ва гонетки справа налево на обратное требует применения специальных устройств для переключения упоров-захватов, что снижает надежность работы устройства. Цель изобретения - упрощение кон сУрукции и повышение надежности устроиства. Указанная цель достигается тем, что о толкателе для перемещения ваго неток, содержащем раму, штангу, уста новленную с возможностью возвратнопоступательного перемещения в направ ляющих, закрепленный на штанге замкн тый гибкий тяговой орган, кинематически связанный с рамой через упоры двустороннего действия, упоры-захваты, взаимодействую1цие с вагонеткой, упоры-захваты установлены на гибком тяговом органе и закреплены по центр верхней и нижней его-ветвей. На фиг. 1 представлен толкатель в исходном ( нейтральном ) положении, вид сбоку; на фиг. 2 - разрез А-Л на фиг. 1; на фиг. 3-6 - различные поло.ения толкателя и вагонетки при накатывании вагонетки на передаточнуп тележку; на фиг. 7 - то же, при скатывании вагонетки с тележки. Толкатель устанавливается на раме 1 снаГ5 енной приводом для приведения в движение штанги 2 толкателя, перемещающейся в своих направляющих 3 и несущей гибкий тяговой орган , охва тывающий установленные на штанге 2 ролики 5 i шкивы, звездочка). Тяговой орган 4, нижняя ветвь которого находится в кинематической связи с рамой 1 посредством жестко установленных на ней упоров 6 двустороннего де ствия, оснащен упорами-захватами 7 и 8, закрепленными соответственно по центру верхней и нижней его ветвей и поочередно взаимодействующими с тран портируемой вагонеткой. Толкатель работает следуюо им образом. При включении электропривода штан га 2 толкателя перемещается в своих 97 4 направляющих 3 из исходного полоухения (фиг. 3), например, в правую сторону и несет на себе замкнуть1й гибкий тяговой орган t, нижняя ветвь которого находится в кинематической связи с упорами 6 двустороннего действия, в результате чего при перемещении штанги 2 толкателя вправо гибкий тяговой орган приходит во вращательное движение вокруг роликов 5, причем верхняя ветвь его движется вправо со скоростью вдвое превышакхцую скорость штанги 2 толкателя по отношению к раме 1. С этой же линейной скоростью движется вправо и упор 7, закрепленный на верхней ветви тягового органа k. Толкатель останавливается, когда упор 7 примет горизонтальное положение с правой стороны толкателя (фиг.А). Стационарный механизм толкателя, установленный на путях, подает ваго- ( иетку на исходную позицию забора и толкатель тележки включают для закатУ|вания вагонетки. При этом упор 7 захватывает вагонетку за переднюю (ближайшую к тележке) ось и, перемещаясь вновь, закатывает последнюю на тележку, устанавливая ее по центру тележки. При этом штанга толкателя проходит нейтральное положение и смещается влево (фиг. 5) для установки вагонетки по центру тележки, после чего толкатель переключают и штанга толкателя возвращается в нейтральное положение (Лиг. 6). При скатывании вагонетки вправо упор 7 толкает вагонетку за ось и перемещает ее до тех пор, пока упор 7 не выйдет из зацепления с осью вагонетки в момент начала перехода упо- ра 7 на нижнюю ветвь гибкого тягового органа ((1)иг. О. Дальнейшее перемещение вагонетки будет осуществляться упором 8 в бункер вагонетки (фиг.7) Поступательное движение упора 8 ограничивается максимальным выбегом штанги 2 толкателя, так как только перемещение ее и наличие кинематической связи органа k с рамой 1 тележки обусловливает движение упоров 7 и 8.. Толкатель отключают при максимальном вылете, отбирают вагонетку транспортным устройством, установленным на транспортных путях, и возвращают толкатель в исходное положение (Фиг.З). Установка упоров 7 и 8 по центру верхней и нижней ветвей гибкого тягового органа обеспечивает симметричную работу толкателя как влево,,так и вправо от тележки. Возможность накатывания вагонетки на передаточную тележку и скатывания ее на тот же путь позволяет применить предлагаемое устройство при авто матизации внутрицехового рельсового транспорта для любого варианта транспортных схем, а отсутствие индивидуального электропривода и гибкого питахичего. кабеля упрощает конструкцию и резко повышает надежность устройства. Формула изобретения 1. Толкатель для перемещения вагонеток, содержащий раму, штангу, установленную с возможностью возвратнопоступательного перемещения в направляющих, закрепленный на итанге замкнутый гибкий тяговой орган, кинематически связанный с рамой через упоры двустороннего действия, упоры-захваты, взаимодействующие с вагонеткой, о т личаю1иийся тем, что, с целью упрощения конструции и повышения йадежности, упоры-захваты установлен на гибком тяговом органе, 2. Толкатель по п. 1, о т л и ч а щ и и с я тем, что, упоры-захавты закреплены по центру верхней и нижней ветвей гибкого тягового органа. Источники ин(Ьормации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 230210, кл. В 61 I 3/08, 1966. 2.Авторское свидетельство СССР № 759828, кл. F 27 О З/О, 1978 (прототип).
V / I
qjue.Z
J
