Изобретение относится к автоматике и может быть использовано при автоматизации технологических процессов с опережающим скоростным сигналом из промежуточной точки и инерционным участком, имеющим большое время запаздывания , в частности , при автоматизации технологических процессов энергоблоков.
Известна автсэматическая система регулирования (АСР) с опережающим скоростным сигналом, содержащая последовательно соединенные задатчик, элемент сравнения, регулятор, опережаюьшй и инерционный участки объекта регулирования, выход которого Соединен с вторым инверсным входом элемента сравнения, на третий инверсный вход которого подключен дифференциатор, соединенный с выходом опережающего участка объекта регулирования
Наиболее близким техническим реш.ением к изобретению является автоматическая система регулирования с опережающим скоростным сигналом, содер,жащая последовательно соединенные за:датчик, сравнивающий элемент, регулятор, опережающий блок объекта, инерционный 6inoK объекта, датчик нагруз-.
ки, устройство коррекции, подключенное первым выходом к второму входу регулятора и к первому входу первого дифференциатора, выход которого подключен к третьему входу регулятора, второй выход инерционного блока объекта подключен к второму входу сравнивающего элемента C2J.
Однако эта АСР имеет низкую дина10мическую точность регулирования при больших значениях времени запаздывания объекта.
Целью изобретения является повышение точности систеьфл.
15
Эта цель достигается тем, что система содержит последовательно соединенные задатчик коэффициентов и первый формирователь коэффициентов и последовательно соединенные второй
20 формирователь коэффициентов, второй дифференциатор и полосовой фильтр подключенный выходом к четвертому входу регулятора, первый формирователь коэффициентов подключен выходом
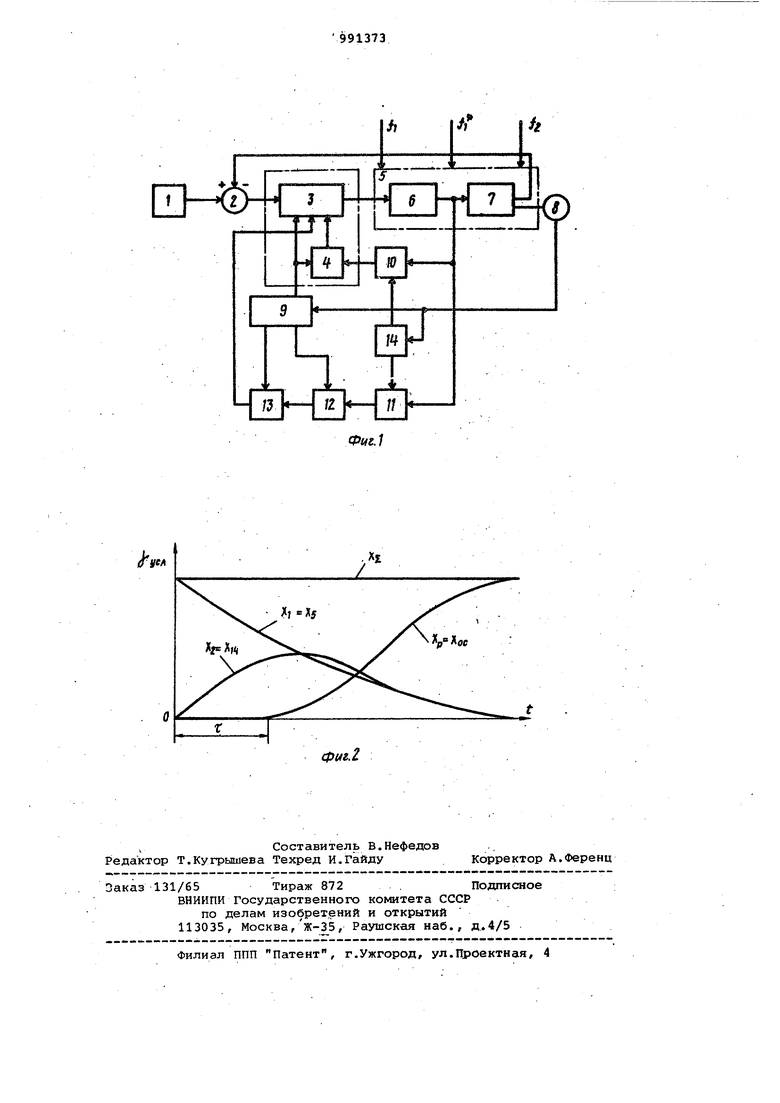
25 к второму входу первого дифференциатора, а вторым входом - к выходу опережающего блока объекта и к первому входу второго формирователя коэффициентов, соединенного вторым входом с 30 вторым выходом задатчика коэффициейтов, вход которого подключен к выходу датчика нагрузки. На фиг.1 изображена блок-схема системы; на фиг.2 - графики, поясняющие ее работу. Система содержит задатчик 1, срав кивающий элемент 2, регулятор 3, пер вый дифференциатор 4, объект 5, опережающий блок б объекта, инерционный блок 7 объекта, датчик 8 нагрузки, устройство 9 коррекции, первый форми рователь 10 коэффициентов, второй (|юрмирователь 11 коэффициентов, второй дифференциатор 12, полосовой фильтр 13 и задатчик 14. коэффициенто Устройство 9 коррекции служит для изменения параметров, регулятора первого дифференциатора 4, а также второго дифференциатора 12 и полосового фильтра 13 при изменении нагрузки, например, энергоблока. f , f и fz - возмущения соответственно на входе опережающего блока $ на входе и выходе инерционного блока 7 объекта 5. В -основу построения автоматическо системы регулирования с опережающим скоростным сигналом положен принцип суперпозиции сигнала основной обратной связи и двух сигналов различной величины и спектральной плотности в дополнительных контурах регулировани при возмущениях f 2 Этот принци позволяет компенсировать как запазды вание, так и инерционность объекта регулирования, а значит, повысить ди намическую точность регулирования.. Этот принцип демонстрируют следунвдие графики (фиг.2): выходной сигнал регулиро вания, равный сигналу основной обрат ной связи в разомкнутой системе при возмущении f , поданном между,собственно регулятором 4 и опережающим участком 7 объекта: при о t«T| при t С , С - время запаздывания инерцион ного участка регулирования 7 объекта 5/ Х - сигнал обратной связи в пер вом дополнительном контуре регулирования (с выхода jiep вого дифференциатора 4); Х2 - сигнал обратной связи во втором дополнительном конту ре регулирования (с выхода полосового фильтра 13), ТУСЛ КОП-К„„ - значение условной един ицы, где Крр,и К,„- соответственно коэффициенты усиления опережающего и инерционног участков 6. и 7 объекта 5 Xg - идеализированный суммарный сигнал на входе собственно регулятора 3, равный единичному скачку jyc/, . Реальный суммарный сигнал на входе собственно регулятора 3 Xg отличается от идеального Xg и наиболее близко совпадает с ним при следующих зна 1ениях коэффициентов усиления и постоянных Ёремени дифференциаторов 4, 12, полосового фильтра 13 КА(КИН KA2 iw (4) ,5Г,(5) Аде ) эквивалентная постоянная времени инерционного блока 7 объекта 5; Тин постоянная времени (большая) инерционного блока 7/ бин постоянная времени (меньшая) этого блока при передаточной функции инерционного участка, равной К и e-Р (Ти„Р+Ь(би„.р+1) Что касается параметров регулятора, то они могут быть рассчитаны, например, по формулам с OП где Т,, - время изодрома, а Кр - коэффициент регулирования собственно регулятора 3 при передаточной функции опережающего блока 6 объекта, имеющий вид ((опР-ьО on t где TOP и (УОП .соответственно большая и меньшая постоянные времени опережающего блока б объекта. При имеет место полная компенсация запаздывания и инерционности объекта регулирования. Значения коэффициента усиления и постоянных времени дифференциаторов, полосового фильтра и собственно регулятора изменяются при изменении нагрузки. Автоматическая система регулирования работает следующим образом. В установившемся режиме, когда f 0 и , на вход автоматической систег т регулирования подается задание с выхода задатчика 1, которое сравнивается на элементе 2 сравнения с выходным, си гн ал ом X р X OQ. Оши б к а рассогласования подается на первый вход регулятора 3. На второй и третий входы регулятора 3 поступают нулевые сигналы с выходов соответственно первого дифференциатора 4 и полосового фильтра 13. Суммарный сигнал на входе регулятора 3 равен О.
В соответствии с величиной сигнал датчика 8 параметры первого и второго формирователей 10 и 11 коэффициентов через задатчик 14 коэффициентов установлены такими, чтобы выполнялис соотношения (2) и (ЗУ
Остальные параметры Тд, Тд2, Т Т„, Кр,устанавливает устройство 9 коррекции в соответствии с выражениями (4), (5), (7) и (8) также в зависимости от величины сигнгша датчика .8 нагрузки.
При возмущении f скоростной сигнал с выхода опережающего блока б объекта 5 поступает одновременно на входн инерционного блока 7 и формирователей 10 и 11 коэффициентов.
Выходной сигнал регулирования Хр, а значит, и сигнал основной обратной связи XQ появляется на выходе через время f . Поэтому на временном участке t воздействует на вход регу:Лятора сумма сигналов двух дополнительных контуров регулирования с обратным знаком, способствующая подавлению возмущения f (фиг,2). Через временной интервал t появляется сигнал и через элемент 2 сравнения на регулятор 3 поступает дополнительный сигнал сяиибки, направленный также на подавление приложенного возмущения f .
Таким образом, на всем интервале регулирования за счет суперпозиции сигналов различной величины и спектральной плотности обеспечиваетг ся постоянный сигнал отрицательной оратной связи, обеспечивающий подавление приложенного возмущения f.
При возмущении , осуществляется перестройка параметров системы от сигнала датчика 8 нагрузки, и система работает аналогично с той разницей , что возмущение f2 дополнительно к сигналу ,J- поступает непосредсвенно на элемент 2 сравнения, при этом ошибка рассогласования воздействует на опережающий блок б объекта 5 через регулятор 3. Следовательно, применение в автоматической системе регулирования с опережающим скоростным сигналом первого и второго формирователей коэффициентов, второго дифференциатора, полосового фильтра и задатчика коэффициентов, связанныхопределенным образом между собой и
с известными блоками, позволяет реализовать принцип суперпозиции сигнала основной обратной связи и двух сигналов различной величины и спектральной плотности в дополнительных конту5 pax обратной связи и повысить динамическую точность регулирования при больших значениях времени запаздывания объекта, что обеспечивает при использовании изобретения, например,
10 для управления котлоагрех атами, уменьшение расхода теплоносителя.
Формула изобретения
15
Автоматическая система регулирования с опережающим скоростным сигналом, содержащая последовательно соединенные задатчик, сравнивающий элеQ Мент, регулятор, опережающий блок объекта, инерционный блок объекта, датчик нагрузки, устройство коррекции, подключенное первым выходом к второму входу регулятора и к первому входу
5 первого дифференциатора, выход которого подключен к третьему входу регулятора, второй выход инерционного бяока объекта подключен к второму входу сравнивающего элемента, о т л и ч а ю щ а я с я тем, что, с целью повы0шения точности системл, она содержит последовательно соединенные задатчик коэффициентов и первый формирователь коэффициентов и последовательно соединенные второй формирователь коэф фициентов, второй дифференциатор и полосовой фильтр, подключенный выходом к четвертому входу регулятора, первый формирователь коэффициентов подключен выходом к второму входу первого диф0 (Ъеренциатора, а вторым входом - к выходу опережающего блока объекта и к первому входу второго формирователя коэффициентов, соединенного вторым ;входом с вторым выходом задатчика ко5 эффициентов, вход которого подключен .к выходу датчика нагрузки.
Источники информации, принятые во внимание при экспертизе
1.Александрова Н.Д. Расчет пара 0 метров динамической настройки регулятора температуры пара с опережающим скоростным сигналом.- Теплоэнергетика, 1965, № 4, с. 25, рис. 1.
2.Хутский Г.И., Кулаков Г.Т.
5 Система автоматического регулирования температуры перегретого пара с устройством коррекции параметров динамической настройки.- Теплоэнергетика, 1968, 3 (прототип).
Н
Ж
Л|Л tfi
..l-L
Т
gj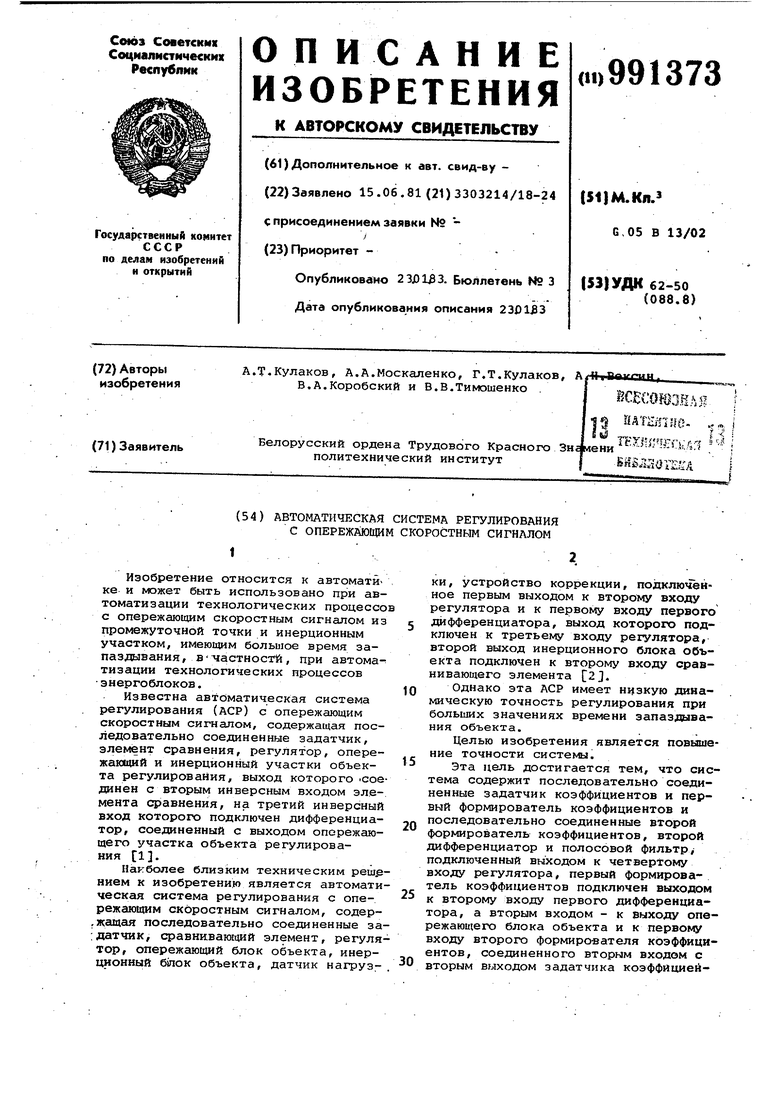
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Автомат-настройщик двухконтурных систем регулирования с опережающим сигналом | 1987 |
|
SU1624245A1 |
| Автоматическая система регулирования температуры пара котлоагрегата | 1984 |
|
SU1224503A1 |
| Устройство для регулирования температуры пара | 1983 |
|
SU1129459A1 |
| Система регулирования энергоблока | 1980 |
|
SU931920A1 |
| Способ каскадного регулированияТЕХНОлОгичЕСКОгО пАРАМЕТРАТЕплОэНЕРгЕТичЕСКОгО Об'ЕКТА | 1979 |
|
SU848879A1 |