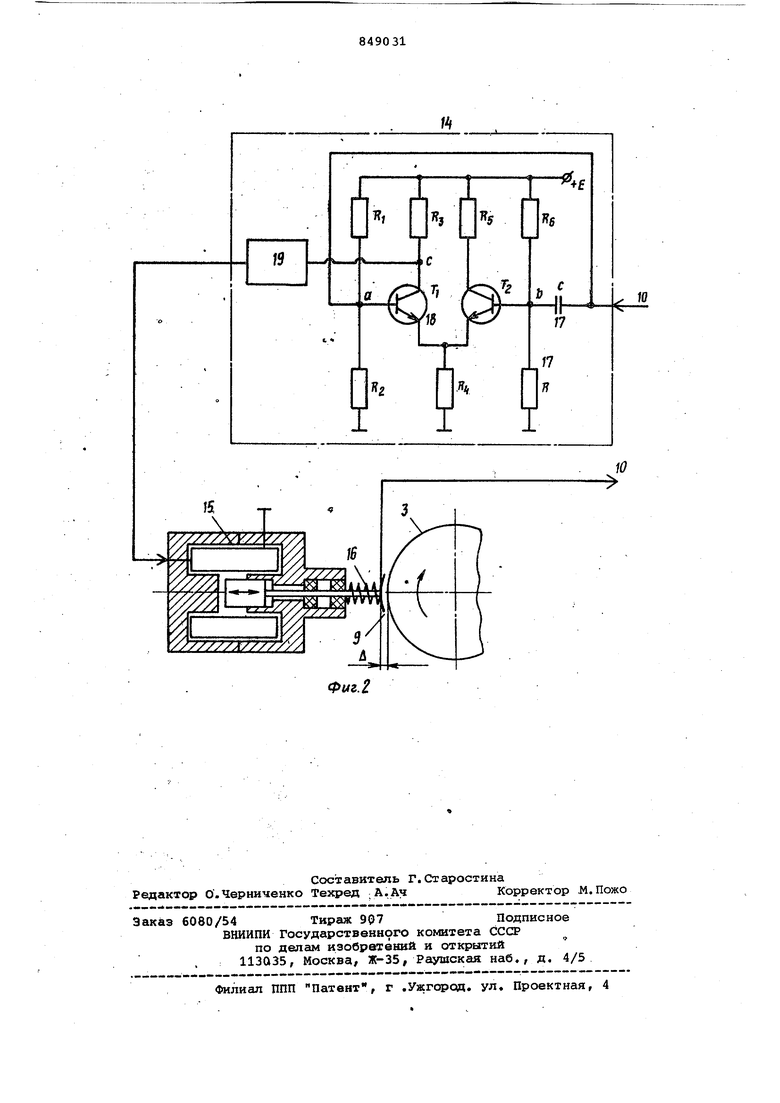
последовательно соединенные емкостный датчик 9, распапоженный соосно электромагнитам 4 и 5 преобразователь 10 линейных перемещений и ос. 4ц1Ш1Ограф 11, последовательно соединенные детектор 12 среднего значения вход которого соединен с выхсдом пре образователя 10 линейных перемещений, и самописец 13, последовательно соединённые блок 14 выделения сигнала погрешности геометрии наружного кольца подшипника и биения вала, вход которого соединен с выходом пре образователя 10 линейных перемещений, и механизмом 15 слежения, подвижная часть 16 которого жестко соединена с емкостным датчиком 9. Блок выделения состоит из последовательно соединенных АС-фильтра 17, схемы 18 вычитания и усилителя 19 мсадности. Устройство работает следующий. образом. Внутреннее кольцо контролируемого подшипника 3 приводится во вращение от приводного вала 1 вместе с оправкой 2, Под действием поочередных нагружаквдих усилий электромагнитов 4 и 5 наружное кольцо и элементы качения контролирующего подшипника 3 совершают возвратно-поступательные колебания в радиальном направлении на величину зазоров, присущую данному типоразмеру подшипника. При вращении внутреннего кольца и элементов качения подшипника амплитуда возвратнопоступательных колебаний наружного кольца подашпника 3 колеблется в определенных пределах вследствие неточ ности изготовления, формы и размеров элементов контролируемого подшипника Бесконтактный емкостный датчик 9 с преобразователем 10 линейных перемещений преобразует колебательное движение наружного кольца 6 в электрические сигналы, пропорциональные радиальным перемещениям наружного кольца. Устройство проводит также контроль радиального зазора подшипников и при невращающемся подшипнике 3. Предлагаемое устройство позволяет осуществить запись зазорограмм подшипников качения и значительно повысить точность и производительность контроля. Формула изобретения Устройство для контроля радиального зазора подшипников качения, содержащее приводной вал с оправкой для монтажа контролируемого подшипника механизма радиального нагружения в виде двух электромагнитов, расположенных соосно по обе стороны подшипника, и командоаппарата, последовательно соединенные емкостный датчик, расположенный соосно электромагнитам, преобразователь линейных перемещений и осциллограф, а также самописец, о тличающееся тем, что, с целью повышения точности контроля оно снабжено детектором среднего значения, вход которого соединен с выходом преобразователя линейных перемещений, а выход - со входом самописца, последовательно соединенными блоком выделения, вход которого соединен с выходом преобразователя линейных перемещений, и механизмом слежения, подвижная часть которого жестко соединена с емкостным датчиком. Источники информации принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 587313, кл. 01 В 5/14, 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующее устройство дефектоскопа | 1983 |
|
SU1089505A1 |
| Устройство для измерения жесткости подшипника качения | 1983 |
|
SU1134896A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2093810C1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| Способ определения радиального зазора в подшипнике качения | 1989 |
|
SU1723479A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕЛ КАЧЕНИЯ ПОДШИПНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124191C1 |
| Устройство для контроля подшипников качения | 1990 |
|
SU1751654A1 |
| Устройство для дуплексации подшипников качения | 1989 |
|
SU1698671A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАДИАЛЬНОГО ЗАЗОРА ПОДШИПНИКОВ | 1970 |
|
SU283607A1 |
| Устройство для измерения радиальногозАзОРА пОдшипНиКОВ | 1979 |
|
SU853359A1 |