Изобретение относится к машиностроению и может быть использовано для дуплексации радиально-упорных шарикоподшипников при сборке подшипниковых узлов.
Цель изобретения - повышение точности дуплексации подшипников путем одновременного контроля их кинематических характеристик в условиях, приближенных к эксплуатационным, а также уменьшение трудоемкости дуплексации подшипников.
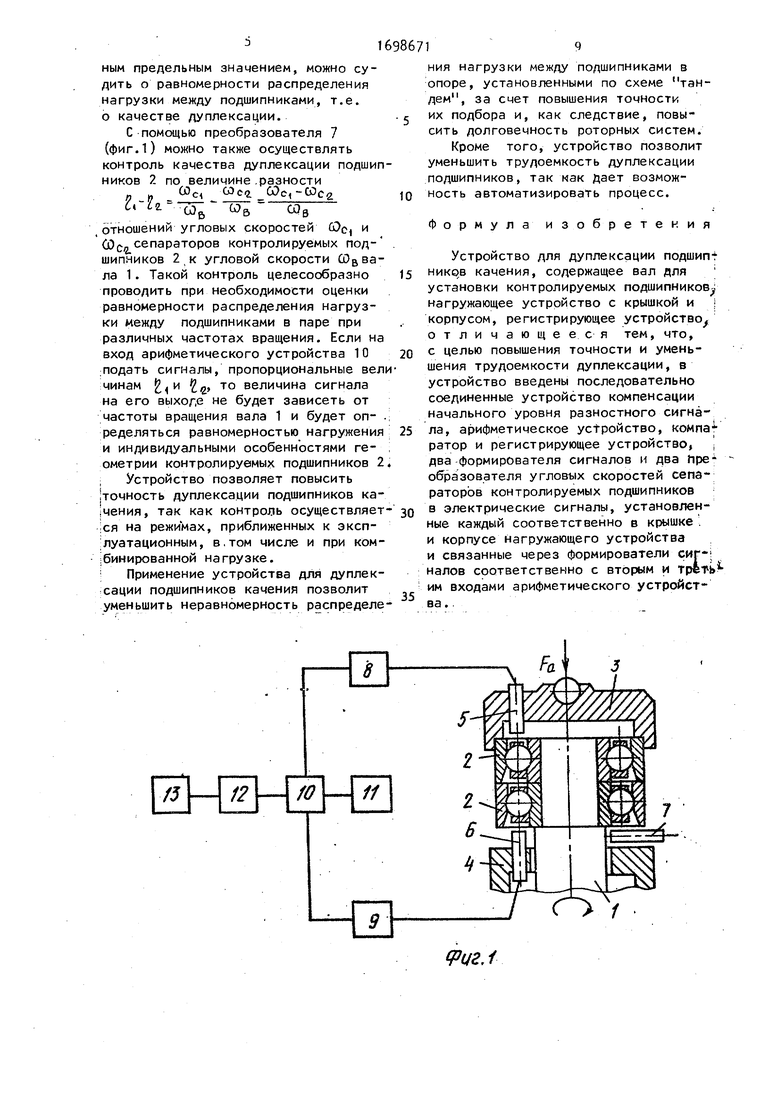
На фиг.1 представлена схема устройства для дуплексации подшипников качения; на фиг.2 - пример зависимостей угловых скоростей сепараторов от осевой нагрузки для двух правильно сдуплексированных подшипников; на
фиг.З - такие же зависимости для случая, когда подшипники не подходят для .работы в паре.
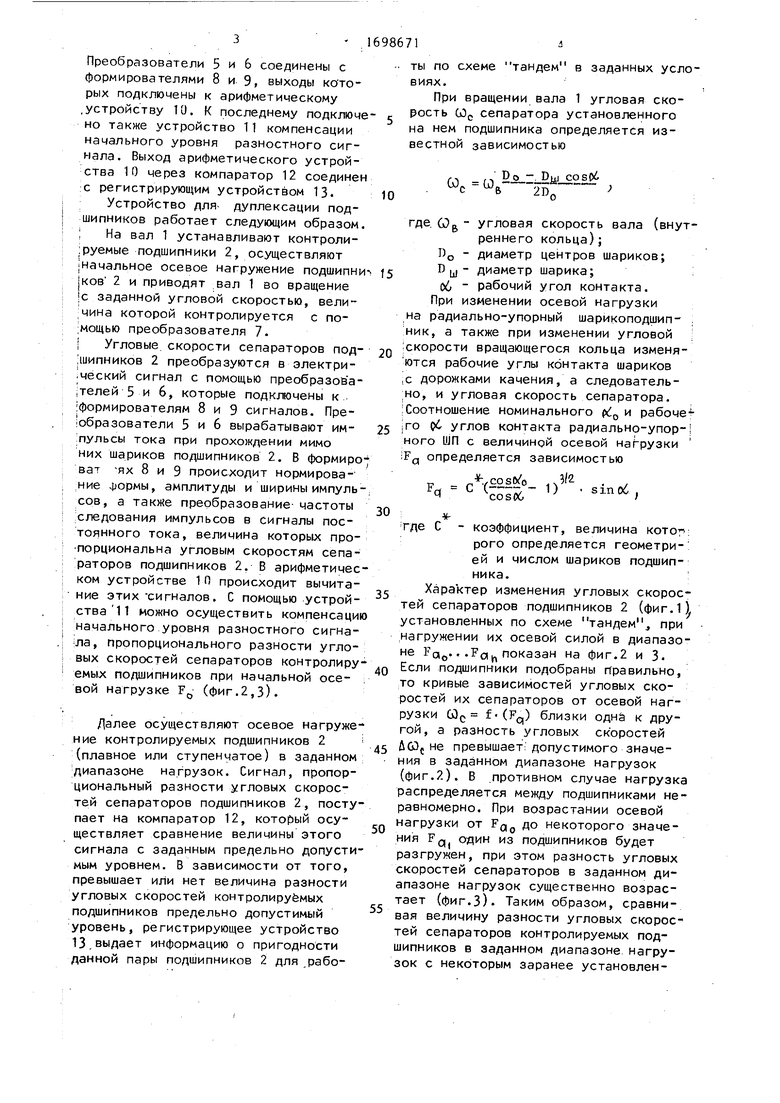
Устройство для дуплексации подшипников (фиг.1) содержит вал 1 привода вращения, на котором по схеме тандем устанавливают контролируемые подшипники 2. Через крышку 3 к наружным кольцам подшипников 2 прикладывают осевую нагрузку F. В крышке 3 и корпусе 1 привода вращения установлены преобразователи 5 и 6 угловых скоростей сепараторов контролируемых подшипников 2 в электрические сигналы. Кроме того, в корпусе 4 установлен преобразователь 7 угловой скорости вала 1 в электрический сигнал.,
Cfc СО 00 О -ч
Преобразователи 5 и 6 соединены с формирователями 8 и 9, выходы которых подключены к арифметическому устройству 10. К последнему лодключе но также устройство 11 компенсации начального уровня разностного CHI- нала. Выход арифметического устройства 10 через компаратор 12 соединен с регистрирующим устройством 13.
Устройство для дуплексации подшипников работает следующим образом.
На вал 1 устанавливают контролируемые подшипники 2, осуществляют начальное осевое нагружение подшипни ков 2 и приводят вал 1 во вращение с заданной угловой скоростью, величина которой контролируется с помощью преобразователя 7. , Угловые скорости сепараторов подшипников 2 преобразуются в электрический сигнал с помощью преобразователей 5 и 6, которые подключены к формирователям 8 и 9 сигналов. Пре- образователи 5 и 6 вырабатывают импульсы тока при прохождении мимо них шариков подшипников 2. В формиро ва ях 8 и 9 происходит нормирование формы, амплитуды и ширины импульсов, а также преобразование частоты следования импульсов в сигналы постоянного тока, величина которых пропорциональна угловым скоростям сепараторов подшипников 2. В арифметическом устройстве 10 происходит вычитание этих сигналов. С помощью устройства 11 можно осуществить компенсаци начального уровня разностного сигнала, пропорционального разности угловых скоростей сепараторов контролируемых подшипников при начальной осевой нагрузке F (фиг.2,3).
Далее осуществляют осевое нагружение контролируемых подшипников 2 (плавное или ступенчатое) в заданном диапазоне нагрузок. Сигнал, пропорциональный разности угловых скоростей сепараторов подшипников 2, поступает на компаратор 12, который осуществляет сравнение величины этого сигнала с заданным предельно допустимым уровнем. В зависимости от того, превышает или нет величина разности угловых скоростей контролируемых подшипников предельно допустимый уровень, регистрирующее устройство 13 выдает информацию о пригодности данной пары подшипников 2 для рабо
0
0
5
5
ты по схеме тандем в заданных условиях.
При вращении вала 1 угловая скорость СОС сепаратора установленного на нем подшипника определяется известной зависимостью
,„Do - Dm cosOi
2D0
где G)B - угловая скорость вала (внутреннего кольца);
D0 - диаметр центров шариков;
Вш- диаметр шарика;
Ж - рабочий угол контакта. При изменении осевой нагрузки на радиально-упорный шарикоподшипник, а также при изменении угловой скорости вращающегося кольца изменяются рабочие углы контакта шариков с дорожками качения, а следовательно, и угловая скорость сепаратора. Соотношение номинального и рабочего 06 углов контакта радиально-упор- ного ШП с величиной осевой нагрузки Fn определяется зависимостью
Fq
c(cosЈ0 0 созОб
sin od
5
5
0
0
5
где С - коэффициент, величина кото рого определяется геометрией и числом шариков подшипника.
Характер изменения угловых скоростей сепараторов подшипников 2 (фиг.11 установленных по схеме тандем., при нагружении их осевой силой в диапазоне Fao.. «Fah показан на фиг.2 и 3. Если подшипники подобраны правильно, то кривые зависимостей угловых скоростей их сепараторов от осевой Hai- рузки СОС f-CFg) близки одна к другой, а разность угловых скоростей UU)C не превышает допустимого значения в заданном диапазоне нагрузок (фиг.2). В противном случае нагрузка распределяется между подшипниками неравномерно. При возрастании осевой нагрузки от FQO до некоторого значения Fa один из подшипников будет разгружен, при этом разность угловых скоростей сепараторов в заданном диапазоне нагрузок существенно возрастает (фиг.З). Таким образом, сравнивая величину разности угловых скоростей сепараторов контролируемых подшипников в заданном диапазоне нагрузок с некоторым заранее установленным предельным значением, можно судить о равномерности распределения нагрузки между подшипниками, т.е. о качестве дуплексации.
С помощью преобразователя 7 (фиг.1) можно также осуществлять контроль качества дуплексации подшипников 2 по величине разности
с
СО,
COcg 0(
-С0сг
в в
отношений угловых скоростей Юс и (Dcg.сепараторов контролируемых под- шипников 2 к угловой скорости Шввала 1. Такой контроль целесообразно проводить при необходимости оценки равномерности распределения нагрузки между подшипниками в паре при различных частотах вращения. Если на вход арифметического устройства 10 подать сигналы, пропорциональные велчинам
М I
ч
то величина сигнала
на его выходе не будет зависеть от частоты вращения вала 1 и будет оп- ределяться равномерностью нагружения и индивидуальными особенностями геометрии контролируемых подшипников 2
Устройство позволяет повысить точность дуплексации подшипников ка- .чения, так как контроль осуществляется на режимах, приближенных к эксплуатационным, в,том числе и при комбинированной нагрузке.
Применение устройства для дуплексации подшипников качения позволит уменьшить неравномерность распределе
5
0
5
0
5
ния нагрузки между подшипниками в опоре, установленными по схеме тандем, за счет повышения точности их подбора и, как следствие, повысить долговечность роторных систем. Кроме того, устройство позволит уменьшить трудоемкость дуплексации подшипников, так как Дает возможность автоматизировать процесс.
Формула изобретения
Устройство для дуплексации подшипт ников качения, содержащее вал для установки контролируемых подшипников, нагружающее устройство с крышкой и корпусом, регистрирующее устройство, отличающееся тем, что, с целью повышения точности и уменьшения трудоемкости дуплексации, в устройство введены последовательно соединенные устройство компенсации начального уровня разностного сигнала, арифметическое устройство, компа1 ратор и регистрирующее устройство, два формирователя сигналов и два преобразователя угловых скоростей сепараторов контролируемых подшипников в электрические сигналы, установленные каждый соответственно в крышке и корпусе нагружающего устройства и связанные через формирователи сиг-1 налов соответственно с вторым и трет-Ь - им входами арифметического устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики подшипников качения | 1985 |
|
SU1318826A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2093810C1 |
| СПОСОБ ДИАГНОСТИКИ РАДИАЛЬНОГО ЗАЗОРА В ШАРИКОПОДШИПНИКАХ | 2010 |
|
RU2432560C1 |
| Способ определения долговечности подшипника качения и устройство для его осуществления | 1981 |
|
SU989347A1 |
| Способ создания предварительного натяга в комплекте подшипников качения | 1990 |
|
SU1735634A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕЛ КАЧЕНИЯ ПОДШИПНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124191C1 |
| Способ испытания устройств диагностики подшипников качения и установка для его осуществления | 1986 |
|
SU1375966A1 |
| Способ дуплексации шарикоподшипников | 1978 |
|
SU767420A1 |
| Устройство для контроля состояния подшипников качения | 1984 |
|
SU1164569A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1998 |
|
RU2154264C2 |
Изобретение относится к машиностроению и предназначено для комплектования подшипников, применяемых в прецизионных высокоскоростных шпиндельных опорах. Цель изобретения - повышение точности и уменьшение трудоемкости дуплексации. В крыш1 ке и корпусе привода вращения контро - лируемых подшипников установлены преобразователи угловых скоростей сепараторов в электрические сигналы. Преобразователи через формирователи соединены с арифметическим устройством, выход которого через компаратор подключен к регистрирующему устройся ву. При нагружении контролируемых подшипников на рабочей частоте вращения в заданном диапазоне осевых сил величина сигнала на выходе арифметического устройства, пропорцией ная разности угловых скоростей сепараторов, не превышает предельного уровня для правильно скомплектованных подшипников. 3 ил. (Л С
OV
Pve,f
OJC
fan
Составитель В. Родимое Редактор А. Маковская Техред м.МоргенталКорректор А. Обручар
Заказ 386
Тираж
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Ящерицын П.И., Караим И.П | |||
| Скоростные внутришлифовальные шпинде- ли на опорах качения | |||
| - Минск: Наука и техника, | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
