1
Изобретение относится к приводамконвейеров с пульсирующим движением грузов и может быть использовано в . тех отраслях техники, где требуется осуществить односторонйее прерывистое движение рабочего органа п периодическими остановками.
Известен привод шагающего конвейера для транспортировки штучных гру-. зов, состоящий из механизмов вертикального и горизонтального переме|цвмия подвижных рам конвейера 1 .
Недостатком тгисого привода является наличие ударных нагрузок, возийкаюьшх в кулачковом механизме.
Наиболее близким по технической супоюсти является привод конвейера дискретного действия, включающий ведуирШ вал, кинематически связанный с приводной звездочкой через зубчатые колеса и преобразователь движения с кривошипами и подвижными звеньями 2 .
Однако данный привод имеет ряд недостатков: неблагоприятные динамические характеристики (работа с ударгми), повышенный износ и шум при работе. Привод не обеспечивает ллаа ную работу конвейера.-
Цель изобретения - повышение долговечности и Нс1дежности работы путем ликвидации ударных нагрузок.
Указанная цель достигается тем, что в устройстве преобразователь движения ш полнен в виде двух ведупрос и одного ведокгого кривошипа с совпадающими осями вращения и трех подвижных звеньев, одно из которых имеет
fO форму треугольника.
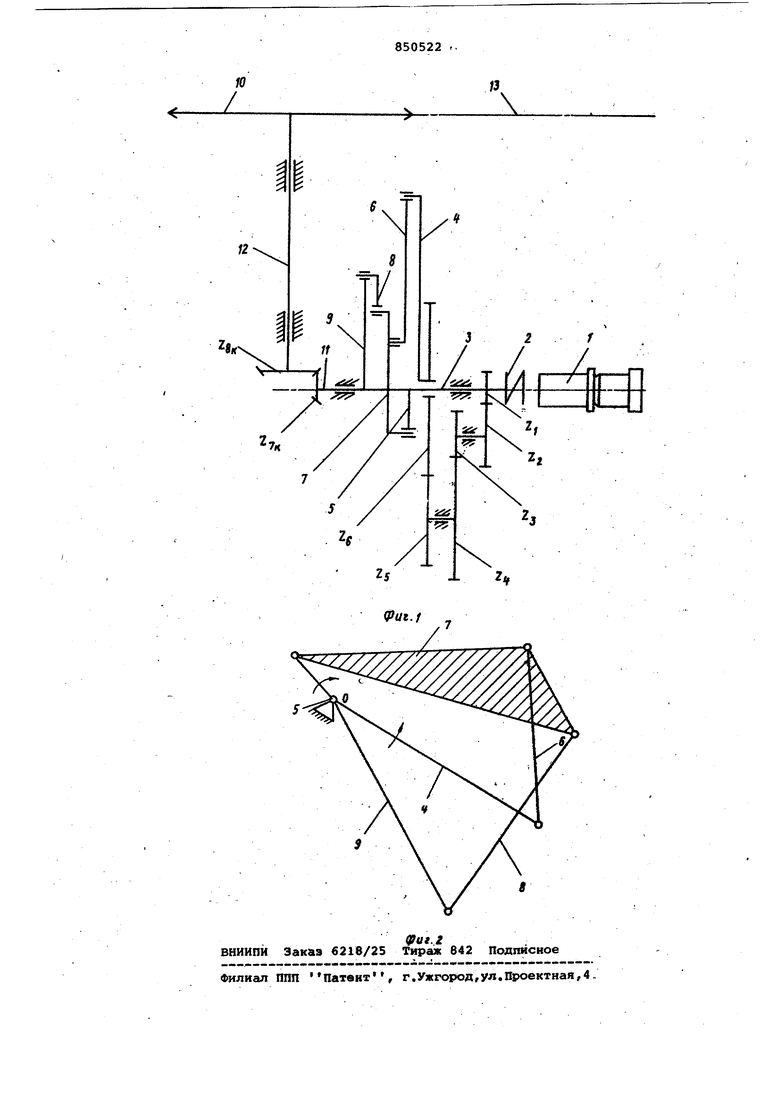
На фиг.1 показана кинематическая схема механизма привода конв)ера дискретного действия; на фиг.2 - схема трехкривошипного шарнирного мехаISнизма , входящего в состав механизма привода конвейера.
Привод конвейера дискретного действия включает мотор-редуктор 1, который Через муфту 2 соединен с ве20дущим валом 3, системы зубчатых ко-; лес Zg трехкривсялипного шарнирно- :1чажного механизма, в состав которого входят кривсяаипы 4 и 5 и звенья (фиг.1 и 2) , конической 2S пары Z я ZQ и приводРой звездочки 10.
Зубчатые колеса Z - Zy жестко закреплены на соответствукнцих валах (не обозначены), а колесо Z сидит 30 на валу 3 свободно. Трехкридошипный шарнирный механизм состоит из двух ведущих криво-шипов 4 и 5, ведомого кривошипа 9 и звеньев 6-8, причем звено 7 имеет форму треугольника (фиг.2). Кривошип 5 жестко связан с ведущим валом 3, кривошип 4 жестко связан с зубчатым колесом Й.Ведомый крив шип,, жестко связан с валом 1.1, к которому крепится коническое зубча тое колесо Z-j, входящее в зацеппенне с коническим зубчатым колесом Zg. .Колесо Zgj жестко связано с валом 12 на котором сидит приводная звездочка 10. Прерывистое поступательное движение цепи 13 с заданным число1й остановок и заданной относительной продолжительностью каждой остановки за один полный цикл (один полный оборо приводной звездочки) обеспечивается набором определенного передаточного отнсяаения 154междУ кривоши пами 4 и 5 и подбором размеров звен ев 4-9 шарнирного механизма. Для осуществления требуемого пер даточного отношения ±34 приводится соответствующий выбор чисел зубьев трех пар зубчатых колес Z -. Для осуществления требуемого пер даточного отношения между ведущим валом 3 и приводной звездочкой 10 производится соответствующий выбор чисел 3y6beBJ z, и Zg. При непрерывном вращении ведущего вала 3 с постоянной угловой скоростью п б/мин, равной числу оборотов мотор-редуктора 1, приводная звездочка совершает прерывистое вращательное движение со средней уг ловой скоростью (пд)ср, определяемо по формуле (И ) .„ llb IZlS/ 9 N Zg При этом цепь двигается прерывис то поступательно со средней линейно скоростью (o)cp I определяемой по ф С{И.))сР у ( о где R - радиус приводной звездочки. Например, пусть требуется осущес вить прегилвистое вращательное движе ние приводной звездочки конвейера с 1б-.:.ю остановками за один оборот зв здочки при соотношении длительносте выстоя и движения, равнсм 1:1, и пр средне й угловой скорости звездочки (nq)cp-10-об/мин. Указанные параметры движения приодной звездочки конвейера реализутся при следующих значениях параметов привода: число оборотов ведущео, вала - nj 150 об/мин; числа убьев звездочек - Z 20, Z, 50 / ,, 20, , Z5- 20, Z(, 48, азмеры звеньев - ОС 50 мм; А 199,97 мм; ,19 MMJ. ,35 мм; ,35 мм, ,93 мм МЕ 0,73 мм,передаточное тношение конической пары - i g 1. Действительно, по.-формуле ( h - 5 Z7K . 2.4 fy аходим (Пд)ср Ю об/мин При этом цепь будет двигаться прерывисто поступательно со средней инейной скоростью, равной - )ср 30 При радиусе приводной звездочки 31-4fO (V,cp--V ® Предлагаемый привод ликвидирует удары в процессе работы, снижает износ и уменьшает шум, повышает надежность и долговечность и обеспечивает плавную, без толчков работу конвейера. Формула изобретет и я Привод конвейера дискретного действия, включающий ведущий вгш, кинематически связанный с приводной звездочкой через зубчатые колеса и преобразователь движения с кривошипами и подвижными звеньями, отлич ающий с я тем, что, с целью повыаения долговечности и надежности работы путем ликвидации ударных нагрузок, преобразователь движения выполнен в виде двух ведущих и одного ведомого кривошипа с совпаданмцими осями и трех подвижных звеньев, одно из которых имеет форму треугольника. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 249274, кл. В 65 G 23/28, 1969. 2.Конвейер горизонтгшьно-замкнутый. Рабочие чертежи Государственного Института по проектированию предприятий трикотажной, швейной и фарфорофа ян совой проквдшленности (ГПИ-3) Минлегпрома СССР, 1978 (прототип) .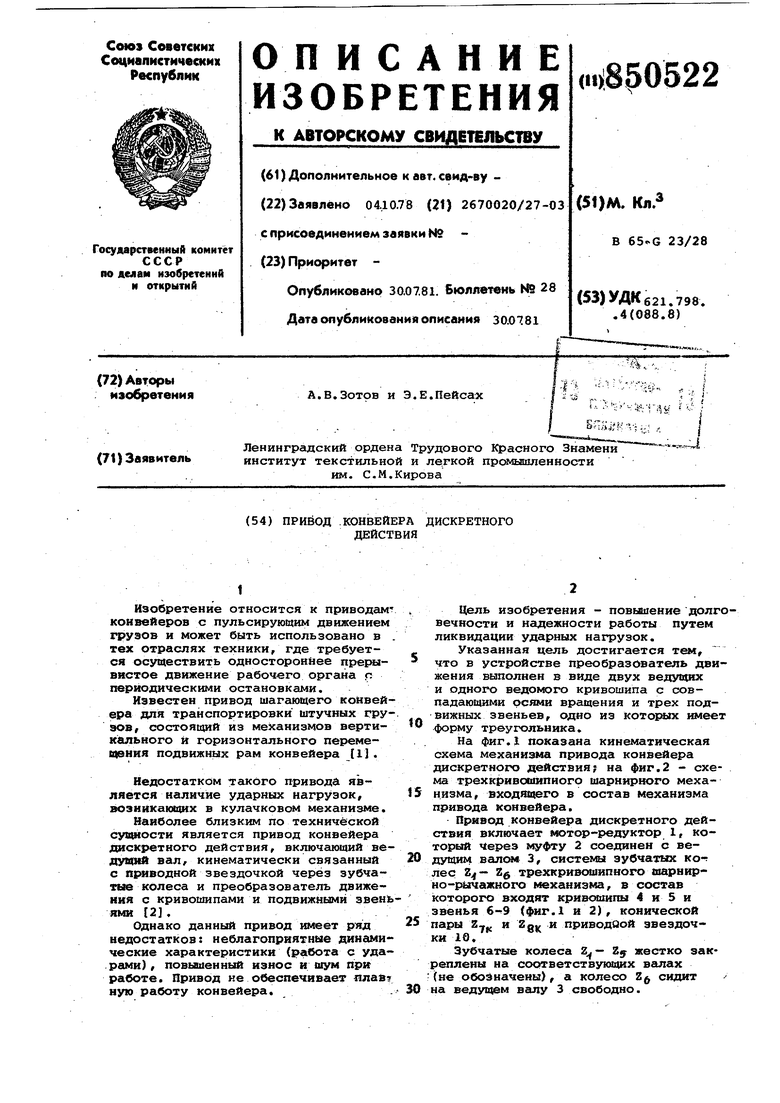

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод конвейера дискретного действия | 2019 |
|
RU2723618C1 |
| Привод пульсирующего конвейера | 1981 |
|
SU975517A1 |
| Привод пульсирующего конвейера | 1985 |
|
SU1294724A1 |
| Привод пульсирующего конвейера | 1984 |
|
SU1180316A2 |
| Зубчато-рычажное устройство привода автомата | 1978 |
|
SU754144A1 |
| Преобразователь равномерного вращения в неравномерное | 1984 |
|
SU1186297A1 |
| Рычажно-зубчатый механизм для преобразования вращательного движения в сложное | 1988 |
|
SU1566130A1 |
| Подающее устройство станаХОлОдНОй пРОКАТКи ТРуб | 1979 |
|
SU818683A1 |
| Конвейер с прерывистым движением тягового органа | 2017 |
|
RU2674383C1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |