(54) СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического поворота обрабатываемых деталей относительно иглы швейной машины | 1980 |
|
SU931849A1 |
| Устройство для автоматического поворота деталей относительно иглы швейной машины | 1977 |
|
SU672249A1 |
| Устройство для автоматического поворота деталей относительно иглы швейной машины | 1978 |
|
SU751858A1 |
| Устройство для автоматического поворота обрабатываемой детали относительно иглы швейной машины | 1980 |
|
SU867960A1 |
| Устройство для перемещения деталей на швейной машине | 1974 |
|
SU500301A1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2008 |
|
RU2385434C1 |
| Дифференциальный раздаточный редуктор трансмиссии траншейного экскаватора | 1978 |
|
SU700607A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ И/ИЛИ РАЗМАТЫВАНИЯ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ НАМОТКИ ИЛИ РАЗМАТЫВАНИЯ | 1992 |
|
RU2015764C1 |
| Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2) | 2023 |
|
RU2819467C1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
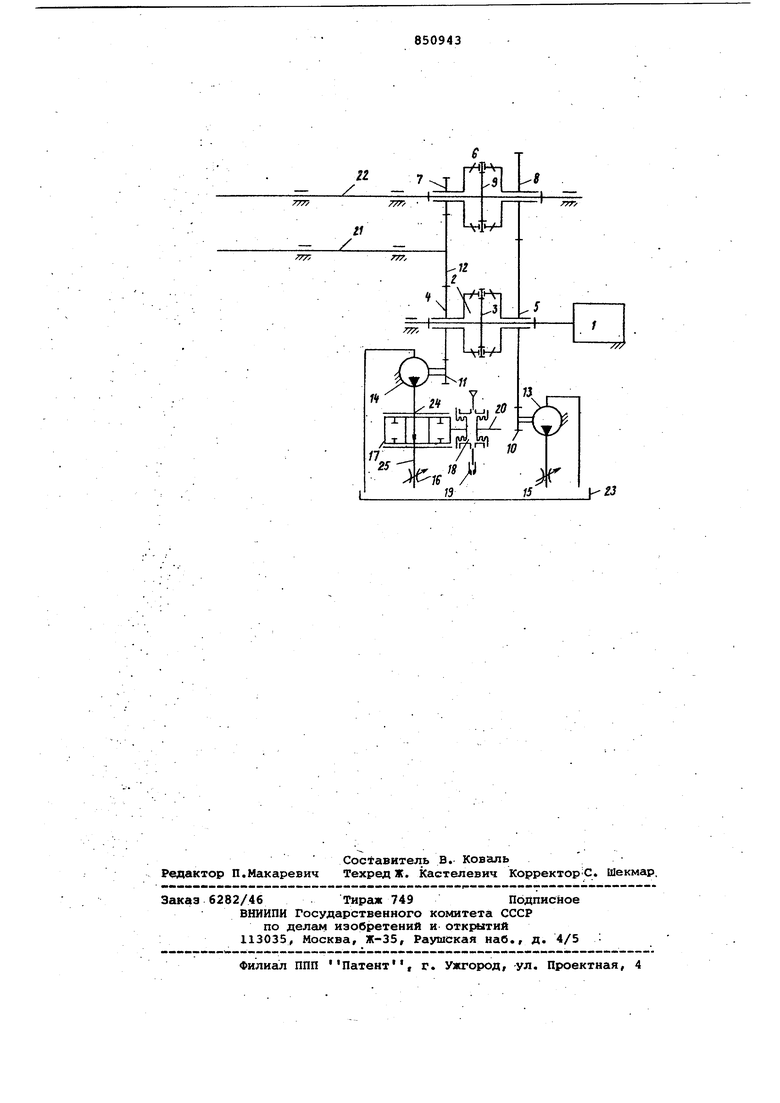
Изобретение относится к машшностроению, в частности, касается авто матизированных швейных машин, предназначенных для стачивания деталей по контуру. Известен следящий гидромеханический привод, содержащий приводной электродвигатель, дифференциальный редуктор С ведущим и ведсямыми звенья ми, основной гидронасос, дросселирующий следявдий Золотник с входом и вы ходом, регулируемые дроссели 11. Основные недостатки известного привода заключаются в сравнительно высокой стоимости, значительных габаритах и повышенной вибрации шума и связаны с тем, что управление корректирующей системой осуществляется пневмогидравлической следящей системой, содержащей в качестве исполиительных элементов гидромоторы. Таким образом, привод данного полу автомата включает два гидромотора, а следовательно, и насосную гидравлическую станцию. Цель изобретения - упрощение конструкции и уменьшениевибрации шума Поставленная цель достигается тем что привод снабжен дополнительным гид ронасосот, ведущее звено диффереициального редуктора связано с привод ным электродвигателем, а его ведокые звенья - с основным и дополнительным гидронасосами, причем выход одного из них связан са входом дросселирующего, следящего золотника, а другого - с регулируемым дросселем. На чертеже представлена принципиальная кинематическая схема привода. Привод содержит приводной электродвигатель 1, дифференциальный редуктор 2 с. ведущим и ведомыми звеньями, соответственно 3 .и 4 и 5, второй диф- ференциальный редуктор 6 с ведущими и ведомым звеньями.,, соответственно 7-9, зубчатые колеса 10-12, основной и дополнительный гидронасосы, соответственно 13 и 14, регулируемые дрос,сели 15 и 16, дросселирующий следящий золотник 17, пневмодатчик 18 с соплом 19 и штоком 20, главный вал 21 швейной головки, вал 22 привода корректирующих колец и гидроемкость 23. Дросселирующий следящий золотник 17 имеет вход 24, который связан с дополнительным гидронасосом 14, а выход его 25 - с регулируемым дроссепем 16. Привод работает следующим образом.
Регулируемые дроссели 15 и 16 настраиваются таким образом, чтобы нагрузка оснойного и дополнительного насоса была одинаковой. Тогда при включении приводного электродвигателя 1 ведущее звено 3 дифференциального редуктора 2 начинает вращать ведомые звенья 4 и 5 в одном направлении и с одинаковой скоростью, Ведомое звено 4 дифференциального редуктора 2 передает движение зубчатому колесу 12, причем последнее вращается с угловой скоростью, равной угловой скорости приводного элект1Эодвигателя 1.
Передаточное отношение ведомого звена 4 и ведущего звена 7 равно передаточному отношению ведомого звена 5 и ведущего звена 8,поэтому ведущие .звенья 7 и 8 дифференциального редуктора 6 будут вращаться в противоположные стороны с одинаковой скоростью, следовательно, ведомое звено 9 вращаться не будет и вал 22 привода корректирующих колец будет неподвижен.
После начала обработки детали, если заданная ориентация обрабатываемой детали нарушается, т.е..изменится степень перекрытия сопла 19, пневмодатчик 18 перемещает дросселирующий следящий золотник 17, что приводит к увеличению гидравлического сопротивления на входе 24, тем самым к затормаживанию ведомогО звена 4 дифференциального редуктора 2, а следовательно, и главного вала 21 швейной головки и ускорению ведомого звена 5 дифференциального редуктора 2, Таким образом, угловые скорости ведущих звеньев 7 и 8 дифференциального редуктора б станут различными и ведомое звено 9 начнет вращаться, вращая тем самым вал 22 привода корректирующих колец. Когда ориентирующие кольца (не показаны) восстановят заданное положение детали, дросселирующий следящий золотник 17 откроется и ведомые звенья 4 и 5 дифференциального редуктора 2 снова будут вращаться с одинаковой скоростью.
Привод ориентирующих колец обладает высокими динсмическими качествами, поскольку разгон ориентирующих колец происходит не за счет разгона приводного электродвигателя, а за счет торможения гидронасоса.
Отличительной особенностью привода в целом я)вляются малые габариты ввиду компактности дифференциального блока и исключения из схемы двух электродвигателей. Снижаются как стоимость /привода, вследствие отсутствия насосной станции, так и уровень шума,В целом предлагаемый привод повысит экономическую эффективность полуавтоматов для стачивания деталей по контуру и улучшит их эксплуатационные характеристики.
Формула изобретения
Следящий гидромеханический привод, содержащий приводной электродвигатель, дифференциальный редуктор с ведущим и
ведомыми звеньялш, основной гидронасос, дросселирующий следящий золотник, с входом и выходом,регулируемые дроссели, отличающийся тем, что, с целью упрощения конструкции
и уменьшения вибрации шума, привод снабжен дополнительньом гидронасосом, ведущее звено дифференциального редуктора связано с приводным электродвигателем/ а его ведомые звенья - с
основным и дополнительным гидронасосами, причем выход одного из них связан со входом дросселирующего следящего золотника, а другого - с регулируемым дросселем.
Источники информации, принятые во внимание при экспертизе
