Известны электроприводы, предусматривающие включение выпрямителей в цепи роторов электродвигателей для возврата энергии скольжения в питающую сеть. Однако, они имеют весьма сложное устройство.
В описываемом многодвигательном электроприводе этот недостаток устранен тем, что указанные выпрямители включены последовательно или параллельно в общую цепь питания преобразователя энергии скольжения. Применение общего для всех двигателей преобразовательного устройства позволяет упростить схему всего привода и уменьщить потребную мощность преобразователя энергии скольжения.
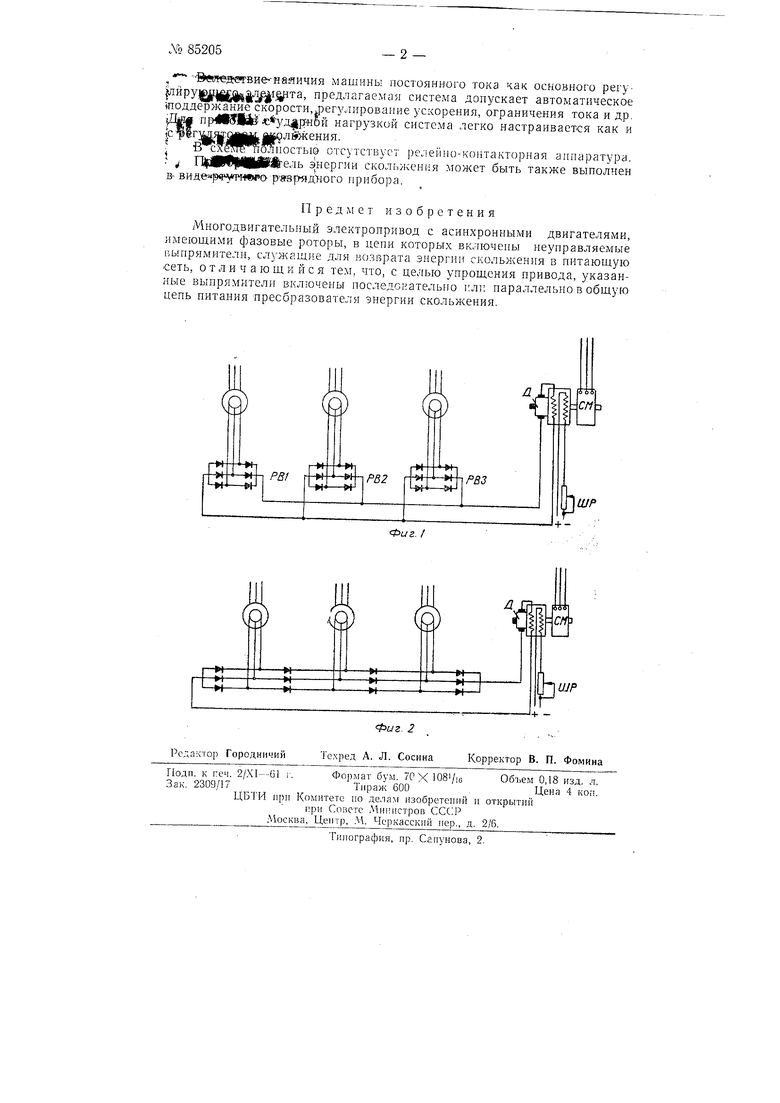
На фиг. 1 и 2 приведены схемы предлагаемого электропривода в двух вариантах исполнения.
Вся линия регулируемых приводов оборудована асинхронными электродвигателями АД1, АД2, АДЗ.
Энергия скольл :ения каждой из мащин передается через выпрямители РВ1, РВ2, РВЗ, соединенные по трехфазной мостовой схеме, к двигателю Д постоянного тока, который преобразует энергию скольжения в механическую и через синхронную мащину СМ возвращает в сеть.
Первый вариант предлагаемой системы (фиг. 1) предусматривает параллельное соединение всех мостовых схем. На якорь двигателя Д подается суммарный ток всех асинхронных двигателей.
Второй вариант (фиг. 2) предусматривает последовательное соединение всех мостовых схем с подачей общего (суммарного) напряжения на щетки двигателя постоянного тока.
Ввиду наличия выпрямителей, уравнительные токи между двигателями в любом из указанных вариантов исключены.
Пуск и останов всех двигателей осуществляется централизованно. Регулирование скорости всех асинхронных двигателей производится одновременно с помощью щунтового регулятора ШР в цепи возбуждения двигателя Д. При отключении одного из асинхронных двигателей система продолжает работать при несколько ином положении регулятора.
Для пОоТучения специальных характеристик двигатель Д может быть снабжен компаундной обмоткой.
&еиедетвие--наяичия машины постоянного тока как основного регу|лйрушш|«(, предлагаемая система допускает автоматическое шоддержание скорости,.регулирование ускорения, ограничения тока и др. ,1Ьм TiplKltASic yjijjtpmH нагрузкой система легко настраивается как и (С ||С1лджения.
J В х полиостьш отсутствует релерпю-коитакторная аппаратура. V ГЙрвЙрвМРЩель энергии сколг.женпя может быть также выполнен в- р-авряятюго прибора.
Предмет изобретения
Многодвигательный электропривод с асинхронными двигателями, имеющими фазовые роторы, в цепи которых включены неуправляемые выпрямители, сл};л ашие для 1;оззрата энергии скольжения в питающую сеть, отличающийся тем, что, с целью упрощения привода, указанные выпрямители включены последовательно или параллельно в общую цепь питания преобразователя энергии скольжения.
PSf
zCri
ШР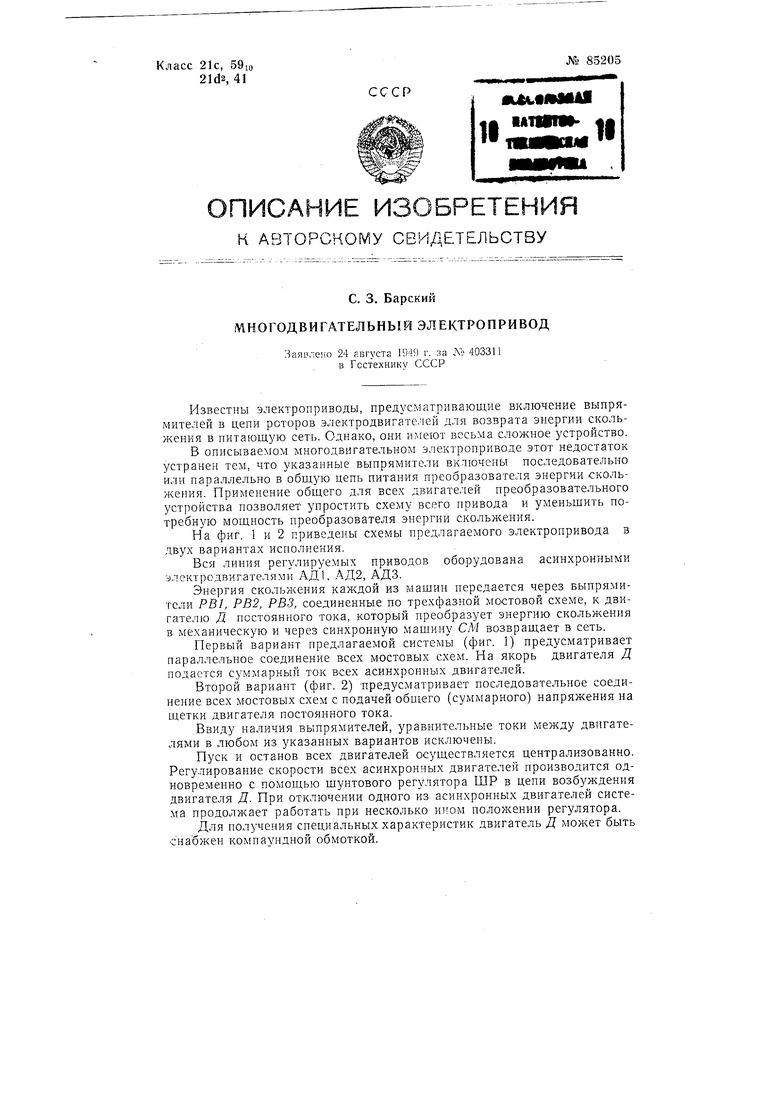
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1950 |
|
SU92787A2 |
| Устройство для ограничения тока мощных электроприводов | 1949 |
|
SU81245A1 |
| Устройство для компаундирования двигателя для постоянного тока, работающего по схеме Леонарда | 1949 |
|
SU80634A1 |
| Устройство для компаундирования реверсивного электропривода по системе Леонарда | 1949 |
|
SU80640A2 |
| Устройство для контакторного управления асинхронным двигателем при посредстве командо-контроллера | 1939 |
|
SU57622A1 |
| Устройство для автоматического регулирования асинхронного двигателя | 1947 |
|
SU76816A1 |
| Устройство для управления двухмоторным электроприводом | 1944 |
|
SU66062A1 |
| Устройство для автоматической подачи инструмента | 1947 |
|
SU74116A1 |
| Устройство для автоматического регулирования подачи врубовой машины | 1946 |
|
SU68232A1 |
| Устройство для автоматического регулирования подачи | 1948 |
|
SU75727A1 |
