1
Изобретение относится к транспортному машиностроению, а именно к способам и устройствам автоматического управления процессом торможения, и может быть использовано в противоблокировочных тормозных системах.
Наиболее близким к изобретению является способ управления процессом торможения колеса транспортного средства, заключающийся в изменении давления в тормозном приводе в зависимости от величины параметра, характеризующего динамическое состояние колеса, измеряемого в процессе торможения и сравниваемого с пороговыми значениями 1.
Недостаток этого способа заключается в том, что он не обеспечивает равновесного положения системы при постоянном давлении. Это объясняется следующим. При достижении относительным продольным скольжением значения 5 0,2 управляющий блок подает командный сигнал на фиксацию давления в приводе. Вследствие неизбежного запаздывания системы фиксация давления произойдет при ,2. Поэтому управляющий блок подаст команду на снижение давления и при достижении 5 0,2 в процессе растормаживания - команду на фиксацию давления. Из-за указанного запаздывания фиксация давления произойдет при ,2.
Далее цикл будет повторяться. Таким образом, этот способ снижает величину пульсаций давления, но не устраняет их.
Целью изобретения является повышение
5 долговечности элементов привода и комфортабельности двилсения при торможении путем снижения пульсаций давления.
Эта цель достигается тем, что величину давления в приводе изменяют пропорционально величине отклонения, оцениваемого по величине разности эталонного и текущего значений указанного параметра, при этом при положительной разности давление повышают, а при отрицательной - понижают.
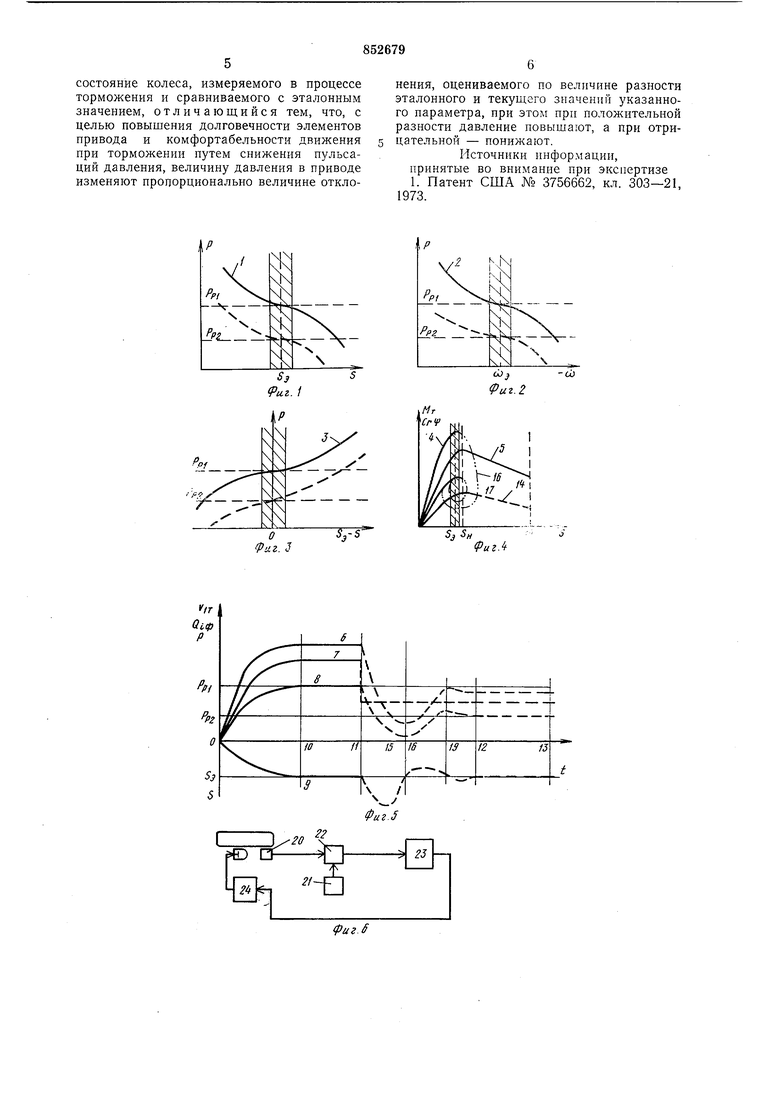
15 На фиг. 1 изображена зависимость давления в приводе от величины относительного продольного скольжения; на фиг. 2 - зависимость давления от величины углового замедления колеса; на фиг. 3 - зависимость давления от разности эталонного и текущего значений относительного продольного скольжения; на фиг. 4 - зависимость тормозного момента и момента тормозной силы от величины относительного продольного скольжения; на фиг. 5 - график изменения во времени тормозного момента, момента тормозной силы, давления и относительного продольного скольжения; на фиг. 6 - структурная схема устройства для
30 осуществления данного способа.
При регулировании давления в приводе по данному способу его зависимость от контролируемых параметров (отпосптельпого продольного скольжения 5 или углового замедления со) может быть изображена кривыми 1 или 2 (фиг. 1, 2). Точки S Sa и
ш й)э являются точками устойчивого равновесия. При отклонении величины S от Sg в сторону увеличения значение разности SB-S становится меньше 0. В этом случае давление в приводе снижают на величину, пропорциональную 5э-5 (см. фиг. 3, кривая 3), вследствие чего разность тормозного момента и момента тормозной силы уменьшается и колесо тормозится менее интенсивно, чем автомобиль. Это приводит к снижению величины 5 до величины 5э. При отклонении 5 в сторону уменьшения разность 8э-5 становится положительной и давление в приводе повышают на величину, пропорциональную значению разности. Это приводит к тому, что колесо тормозится более интенсивно, чем автомобиль, и величина S возрастает до 5э. Описанный процесс соответствует процессу торможения колеса на однородном дорожном покрытии. При этом коэффициент сцепления изменяется в узком диапазоне и обусловленная этпм изменением пульсация продольного скольжения 5 и давления невелики и ей можно пренебречь (заштрихованные зоны на фиг. 1 - 4). В этом случае торможение автомобиля происходит с замедлением, соответствующим среднему замедлению колеса, обусловленному разностью ординат кривых тормозного момента /Ит (кривая 4) и момента тормозной силы Огф (кривая 5). Точка с координатами SQ и Ppi является точкой устойчивого равновесия.
При значительном изменении коэффициента сцепления, например, переходе с сухого асфальта на мокрый, равновесное состояние колеса, соответствующее значению 5 5э, наступит при меньшем значении давления Pp. На фиг. 5 показаны графики изменения тормозного момента Мт (кривая 6), момента тормозной силы Огф (кривая 7), давления Р (кривая 8) и относительного продольного скольжения S (кривая 9) во времени. Отрезок соответствует началу торможения, отрезок 10-11 - торможению на дороге с высоким коэффициентом сцепления, 11 -12 - переходному процессу при уменьшении коэффициента сцепления, - торможению на дороге с низким коэффициентом сцепления.
В начале торможения , вследствие чего разность 5э-5 положительна и давление повышают. При приближении S к 8э их разность уменьшается и в точке 10 становится равной нулю. Повышение давления прекращают. На отрезке 10-11 процесс протекает так, как описано выше. Пульсация Огф, MT, S и Р соизмерима с толщиной
линий и поэтому на графиках не показана. Давление в приводе равно Ppi, что обеспечивает торможение колеса с угловым замедлением, соответствующим линейному замедлению автомобиля.
При уменьшении коэффициента сцепления величина момента тормозной силы уменьшается, вследствие чего увеличивается угловое замедление колеса, обусловленное разностью ординат кривых 4 и 14, и начинает возрастать величина 5. Разность Зэ- -S становится отрицательной и давление понижают (участок 11-15). При этом тормозной момент снижается по кривой 16 и в 5 точке 17 становится меньше момента тормозной силы (кривая 14), вследствие чего колесо разгоняется. В точке 18 величина 5 становится равной 5э и снижение давления прекращается. Однако к этому моменту Q тормозной момент (кривая 6) оказывается меньше момента тормозной силы (кривая 7) и разгон колеса продолжается, вследствие чего разность Зэ-5 меняет знак и давление повышают. В точке 19 разность снова меняет знак и давление понижают. Поскольку управляющее воздействие (изменение давления) находится всегда в противофазе колебаниям 5, а величина управляющего воздействия (Рр-Р) пропорциональна величине отклонения 5э-S, колебательный переходный процесс будет затухающим. Поэтому через некоторое время колебания прекратятся (точка 12), и система займет новое равновесное положение с давлением.
Па фиг. 6 показана структурная схема устройства для осуществления предложенного способа, которое включает датчик 20
параметра колеса (5 или со), блок 21 задачи эталонного значения (Sg или соэ), блок 22 вычисления разности эталонного и текущего значения параметров (5э-S или
й)э-со), усилитель 23 и модулятор давления 24.
При рассогласовании эталонной и текущей величин параметра величина этого рассогласования подается через усилитель 23 как управляющий сигнал на модулятор давления 24, который изменяет давление в приводе в соответствии с величиной и знаком разности указанных величин. В качестве модулятора давления может быть использовано устройство, содержащее два клапана постоянного перепада давления с переменными точками срабатывания, изменяемыми в зависимости от величины и знака управляющего сигнала.
Формула изобретения
Способ управления процессом торможения колеса транспортного средства, заключающийся в изменении давления в тормозном приводе в зависимости от величины параметра, характеризующего динамическое
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения колеса транспортного средства | 1980 |
|
SU927601A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ торможения колеса | 1984 |
|
SU1169860A1 |
| Система автоматического управления торможением | 1979 |
|
SU872344A1 |
| Противоблокировочное устройство | 1982 |
|
SU1068310A2 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Пневматическая противоблокировочная тормозная система | 1977 |
|
SU740567A1 |
| Способ автоматического управления торможением | 1981 |
|
SU1022841A1 |
| УПРОЩЕННАЯ АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА С ПЕСКОСТРУЙНЫМ УСТРОЙСТВОМ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2261812C2 |
| Противоблокировочное устройство | 1980 |
|
SU927599A1 |
