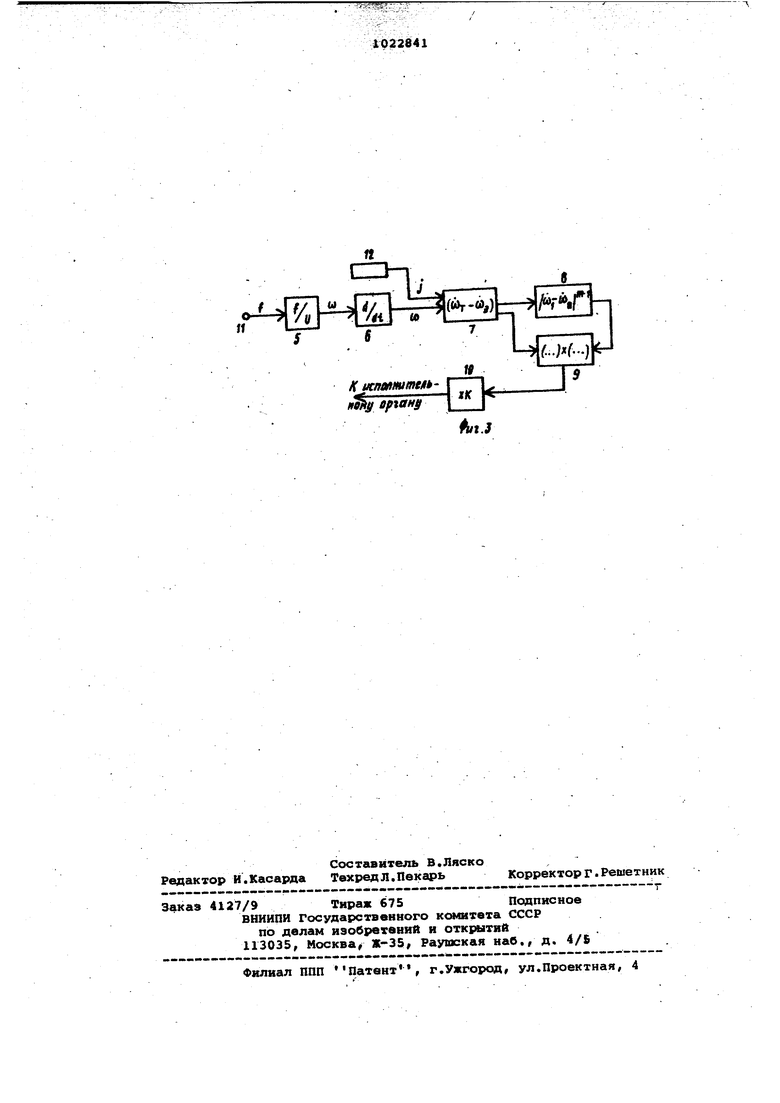
Изобретение относится к тормозным системам транспортных средств и может быть использовано в автоматических противоблокировочных системах. Известен способ управления торможением, заключающийся в корректировке .темпа изменения приводного давления в зависимости от величины разнос ти эталонного и текущего значений уг лсивого ускорения затормаживаемого ко леса 1 . Недостаток этого способа заключается в большой амплитуде колебаний величины относительно продольного скольжения колеса, что снижает качество регулирования. Цель изобретения - повышение эффективности торможения. Указанная цель достигается тем, что в способе автоматического управления торможением, заключающемся в корректировке темпа изменения привод 1НОГО давления в зависимости от величины разности эталонного и текущего .значений углового ускорения затормаживаемого колеса, корректировку темпа изменения давления производят по параболической зависимости. Указанная параболическая зависимость имеет вид (Ьэ-((, где 4г- - «емп изменения давления; К - постоянный коэффициент; с10э эталонное угловое ускорение;текущее угловое ускорение; .- постоянный коэффициент. На фиг. 1 показана зависимость давления Р в приводе от величины разнос ти текущего и эталонного угловых замедлений колеса () при управлении торможением по известному (кривая 1) и предлагаемому (кривая 2) способам; на Фиг. 2 - фазовые портре ты процессов управлений торможением по известному (кривая 3} и предла ае мому (кривая 4) способам; на фиг. 3 функциональная схема устройства, реализующего способ. Изменение давления в тормозном приводе по зависимости, представленной на фиг. 1 кривой 2, обеспечивает по сравнению с известным способом повышение величины управляющего воздействия - разности и расчетного значений давления Р-Ррпри возникновении отклонения Системы от положения равновесия () .Увеличение величины управлякщего воздействия обеспечивает более быстрое устранение отклонения и, как следствие, снижает амплитуду колебаний величины относительного продольного скольжения S. Для сравнения на фиг. 2 показаны фазовые портреты процесса регулирования (зависимости тормозного момента . т и момента тормозной силы М от S.) , полученные при работе противоблокировочного устройства по известному (кривая 3) и по предлагаемому (кривая 4) способам при . Предлагаемьай способ в данном случае позволяет снизить амплитуду колебаний S приблизительно в два раза (iS;( % 2Д82) . Для реализации предлагаемого способа электронный управляющий блок противоблокироаочной систекоа содержит преобразователь 5 частоты в напряжениеj дифференцирующее устройство 6, блок 7 вычисления разности, блок 8 возведения модуля разности в степень т-1 (йри - выпрямитель), блок 9 перемножения,усилитель 10. Для измерения;скорости вращения колеса применен импульсный датчик 11, а для измерения продольного замедления - дес1элерометр 12. Наличие блоков 8 и 9 и усилителя 10 позволяет реализовать параболическую зависимость. Использование предлагаемого способа позволяет снизить амплитуду колебания относительного продольного скольжения колеса, что обеспечивает/ повышение качества регулирования.
7
..6..)
к ucaaname/it
XK
ttfioHS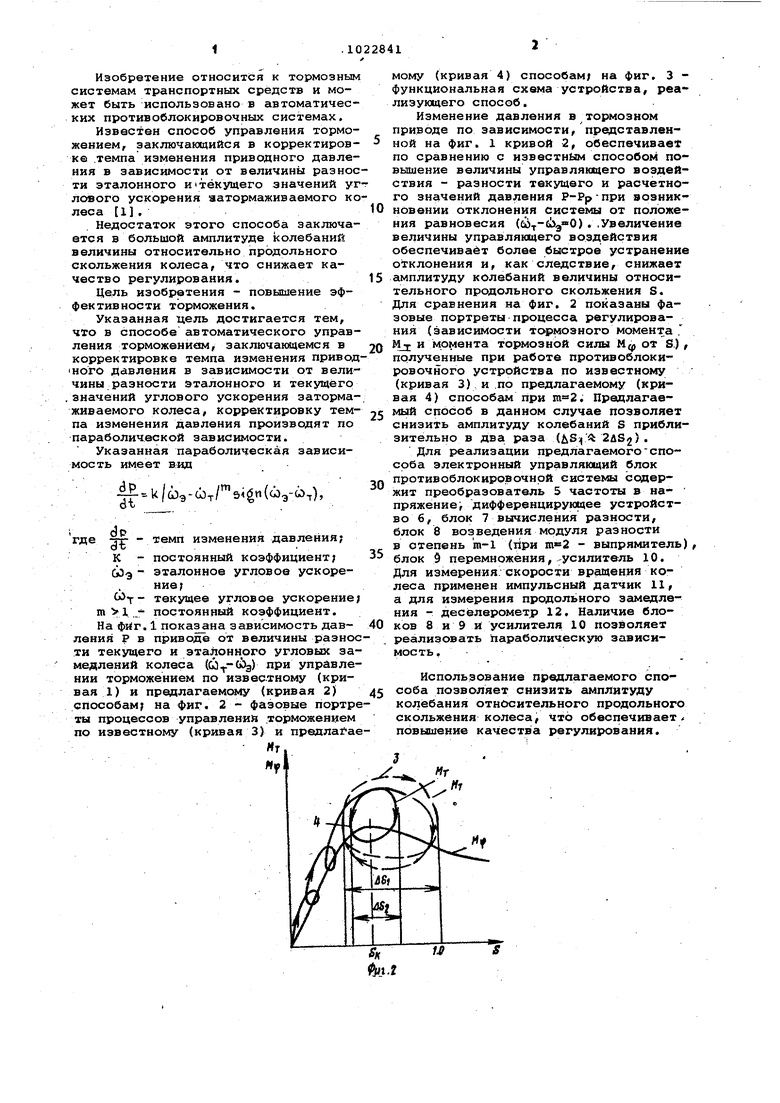
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления торможением | 1981 |
|
SU1013323A1 |
| Способ торможения колеса транспортного средства | 1980 |
|
SU927601A1 |
| Способ торможения колеса | 1984 |
|
SU1169860A1 |
| Способ управления процессом тормо-жЕНия КОлЕСА ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU852679A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| Противоблокировочное устройство для тормозной системы транспортного средства | 1975 |
|
SU786870A3 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
| Способ управления торможением колеса | 1984 |
|
SU1172782A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086441C1 |
1.СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ, эаключакяцийся .в корректировке темпа изменения приводного давления в зависимости от величины разности эталонного и TeKim;eго значений углового ускорения затормаживаемого колеса, отличающий с я тем, что, с целью повыиюния эффективности торможения, корректировку темпа изменения давления производят по параболической зависимое- , ти. 2. Способ по п. 1, отличаю,а, и и с я тем, что указанная параболическая зависимость имеет вид - -k/W3-((c03-OTl, dp где -g - темп изменения давления; К - постоянный коэффициент; i)g - эталонное угловое ускорение; tJJт - текущее угловое ускорение; т 1 - постоянный коэффициент. Ю ND 00 4;: UfUy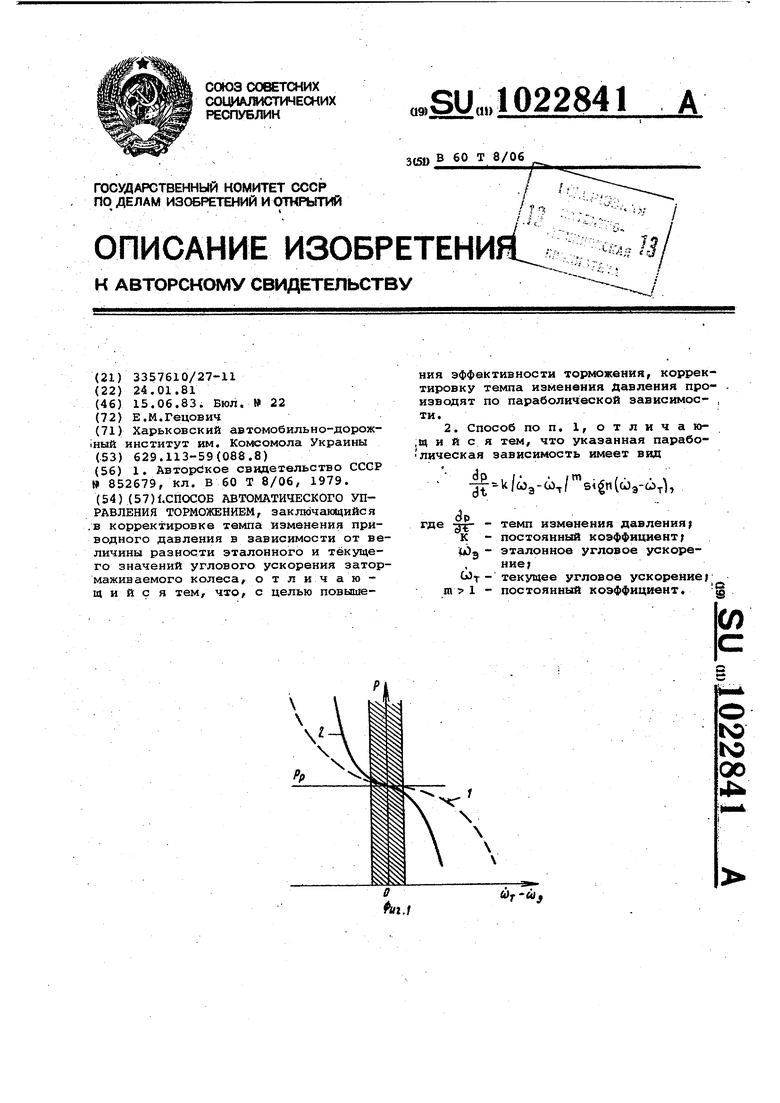
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления процессом тормо-жЕНия КОлЕСА ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU852679A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
