(54) СПОСОБ УПРАВЛЕНИЯ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ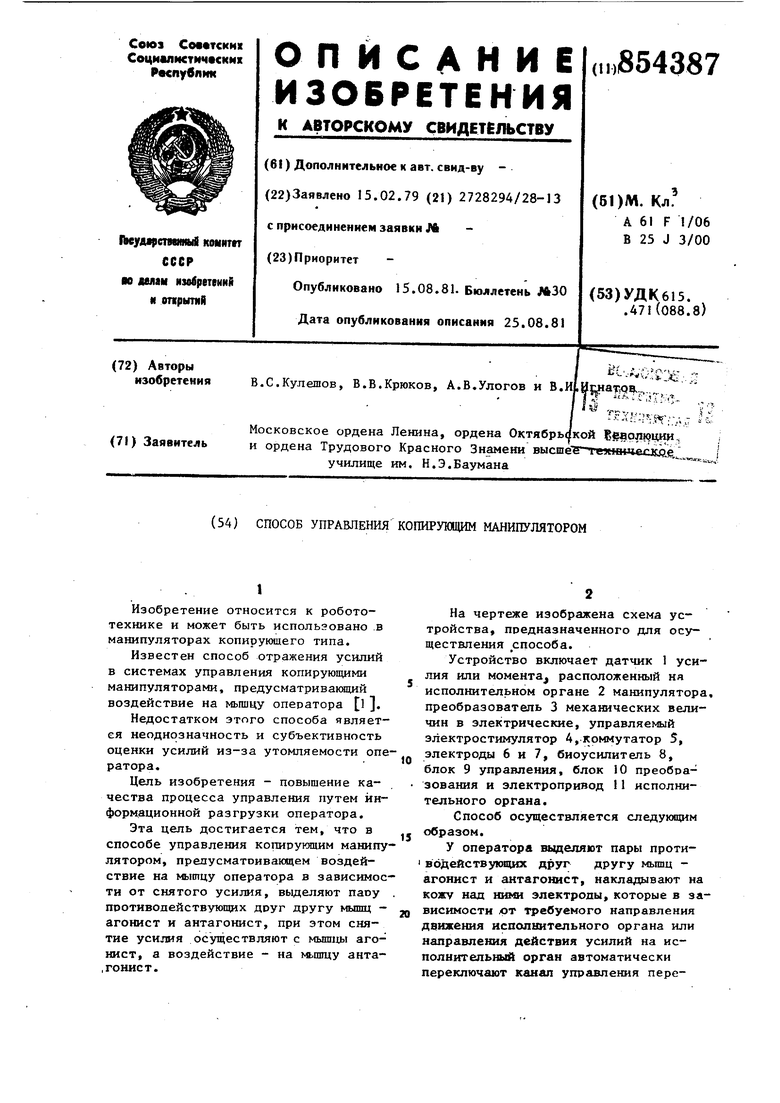

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU842700A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Устройство для управления очувствленным манипулятором | 1981 |
|
SU949629A2 |
| Способ отражения усилий в системах управления копирующими манипуляторами | 1976 |
|
SU574318A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| СПОСОБ ОТРАЖЕНИЯ УСИЛИЙ В СИСТЕМАХ УПРАВЛЕНИЯ | 1973 |
|
SU361868A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ | 1973 |
|
SU368020A1 |
| Устройство для управления очувствленным манипулятором | 1978 |
|
SU729548A1 |
| Устройство для управления манипулятором | 1981 |
|
SU960723A1 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
1
Изобретение относится к робототехнике и может быть испольэовано в манипуляторах копирующего типа.
Известен способ отражения усилий в системах управления копирующими манипуляторами, предусматривакнций воздействие на мышцу оператора l J.
Недостатком этого способа является неоднозначность и субъективность оценки усилий из-за утомляемости оператора.
Цель изобретения - повышение качества процесса управления путем информационной разгрузки оператора.
Эта цель достигается тем, что в способе управления копирукядим манипулятором, препусматоивающем воздействие на мышцу оператора в зависимости от снятого усилия, вьщеляют паоу . противопействующих друг другу мышц агонист и антагонист, при этом снятие усилия осуществляют с мышць агоиист, а воздействие - на мьшщу анта.гонист.
На чертеже изображена схема устройства, предназначенного для осуществления способа.
Устройство включает датчик 1 усилия или момента расположенный ня исполнительном органе 2 манипулятора, преобразователь 3 механических величин в электрические, управляемый электростимулятор 4, коммутатор 5, электроды 6 и 7, биоусилитепь 8,
10 блок 9 управления, блок 10 преобразования и электропривод 11 исполнительного органа.
Способ осуществляется следующим стразом.
15
У оператора вьщеляют пары протиI водействующих друг другу мышц агонист и антагонист, накладывают на кожу над ними электроды, которые в зависимости дт требуемого направления
20 движения исполнительного органа или направления действия усилий на исполнительный орган автоматически переключают канал управления пере
