(5) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1977 |
|
SU642671A1 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Система управления манипулятором | 1978 |
|
SU805245A1 |
| Система управления манипулятором | 1978 |
|
SU723501A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
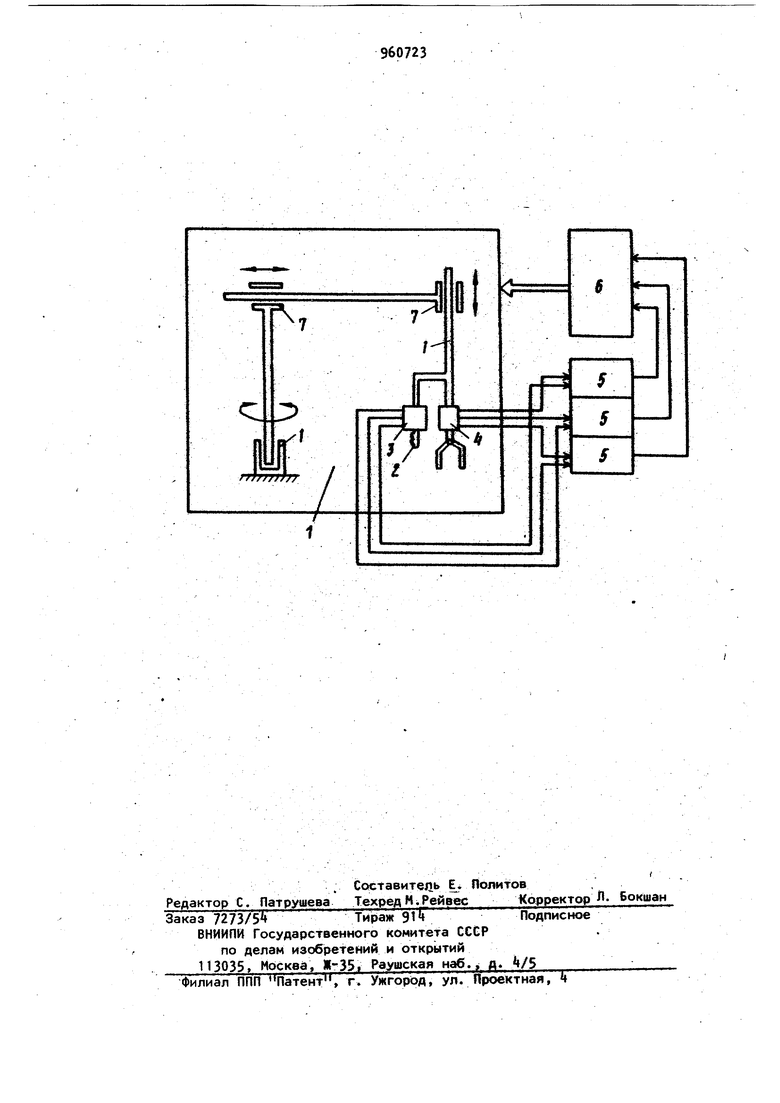
. -1 Изобретение относится к робото;техникё и быть использовано при создании манипуляторов, задающий орган которых находится непосредственно на исполнительном органе ; вблизИ| объекта работ. Известно устройство для управления манипулятором, содержащее кинематически связанные задающий и исполнительный органы, многостепенной датчик усилия и блок астатического .управления С 1. Однако известное устройство не обеспечивает отражения усилий нагрузки исполнительного органа на задающий орган. Наиболее близким техническим решением к изобретению является устро ство, содержащее исполнительный орган, кинематически связанный через первый мйогостепенной датчик усилий с задающим органом, а также блок астатического управления, выходами соединенный с входами приводов исполнительного органа L23. Однако это устройство не обеспечивает отражения усилий нагрузки на задающий орган, что снижает эффективность работ со связанными объектами и может привести к поломке цепи, 1/1сполнительный орган - связанный объект, так как оператор не чувствует направление наименьшего сопротивления и не может дозировать усилия исполнительного органа. Цель изобретения - расширение функциональных возможностей устройства. Цель достигается тем, чтд устройство содержит блок сумматоров и установленный в зоне.кистевых суставов исполнительного органа второй многостепенной датчик усилий, выходы которого подключены к первым входам блока сумматоров, вторыми входами соединенного с выходами первого многостепенного датчика усилий, а выходами С входами блока астатического управления. На чертеже представлена функциональная схема устройства. Устройство содержит исполнительный орган 1, задающий орган 2, первый многостепенной датчик 3 усилий, второй многостепенной датчик k усилий, блок 5 сумматоров, блок 6 аста тического управления, приводы 7 исполнительного органа. Устройство работает следующим образом. Пусть на исполнительный орган 1 не действуют внешние усилия, тогда сигналы датчика усилий равны нулю. Для перемещения исполнительного органа t в требуемом направлении оператор должен приложить к задающему органу 2 определенное усилие в этом направлении. Приложенное усилие вызовет появление сигналов с датчика 3 усилий, которые проходят через бло 5 сумматоров на соответствующие вход блока 6 астатического управления. За хват манипулятора будет двигаться при этом со скоростью, величина и на правление которой определяются усили ем оператора fia задающем органе 2. Если же на захват манипулятора действует внешнее усилие, то величина и направление скорости движения его определяются разностью усилий оператора и нагрузки с определенным масштабом отражения усилий нагрузки на оператора, который определяется крутизной датчиков усилий и коэффициентами усиления по первому и вто рому входам сумматоров блока 5. Изме няя данные коэффициенты усиления, можно устанавливать требуемый масшта отражения усилий нагрузки на операто ра Mf изменять его. Чтобы удерживать манипулятор в неподвижном состоя НИИ оператор должен приложить к задающему органу 2 усилие, равное по величине (с учетом масштаба) и противоположное по направлению усилию нагрузки. Таким образом, достигается активное отражение усилий нагрузки на оператора. Активных элементов (приводов) на задающем органе 2 нет. Применение предлагаемого изобретения позволит повысить эффективность работы указанного класса манипуляторов со связанными объектами так как при этом осуществляется активное отражение усилий нагрузки на оператора и появляется возможность исполнительному органу 3 двигаться по вынужденному закону движения конечной точки (захвата). Формула изобретения Устройство для управления манипулятором, содержащее исполнительный орган, кинематически связанный через первый многостепенной датчик усилий с задающим органом, а также блок астатического управления, выходами соединенный с входами приводов исполнительного органа, о т л и ч а 10 щ е ie с я тем, что, с целью расширения функциональных возможностей устройства, оно содержит блок сумматоров и установленный в зоне кистевых суставов исполнительного органа второй многостепенной датчик усилий, выходы которого подключены к первым входам блока сумматоров, вторыми входами соединенного с выходами первого MHorocTeneViHoro /датчика усилий, а выходами - с входами блока астатического управления. Источники информации, принятые во внимание при Экспертизе 1.Белянин П.Н. Промышленные рооты Японии. НИИАТ, 1977, с. . 2.Там же, с. 352-362 (прототип).
