(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА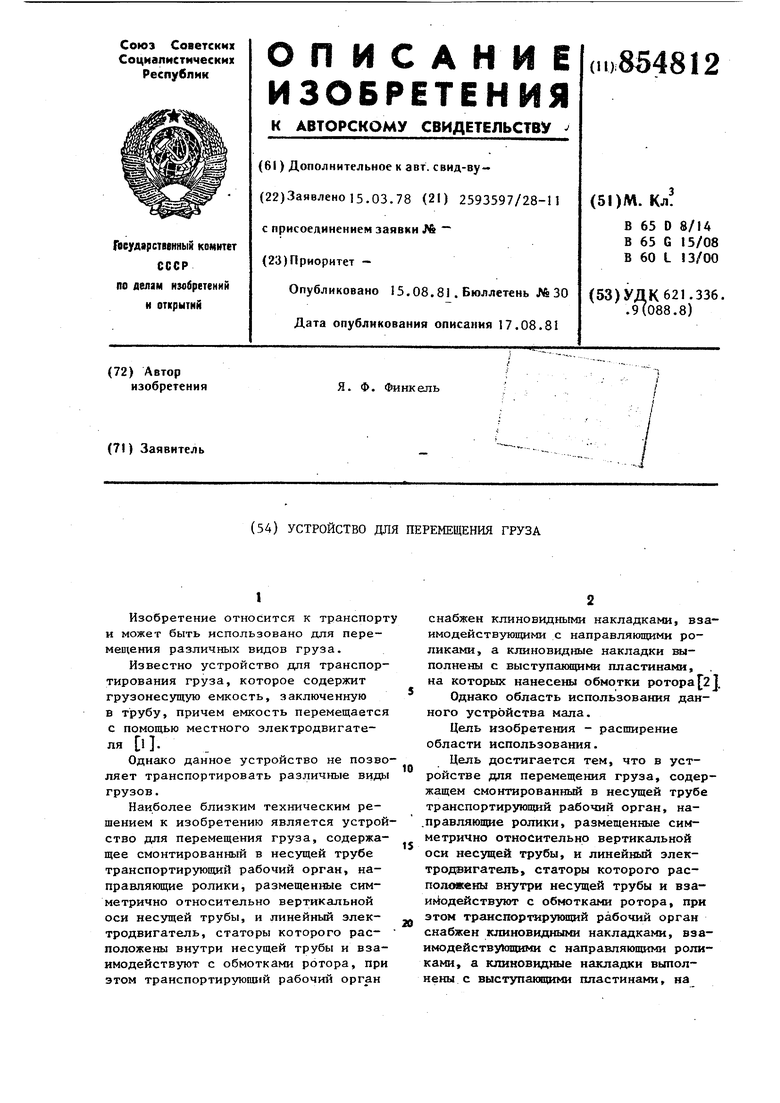
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения груза | 1976 |
|
SU859248A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| ПОЧТОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НА МАГНИТНОМ ПОДВЕСЕ, УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ, УСТРОЙСТВО ЕЁ ПУНКТА ПОГРУЗКИ И РАЗГРУЗКИ, УСТРОЙСТВО ВЕРТИКАЛЬНОГО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ | 2018 |
|
RU2706615C2 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для транспортирования грузов по трубопроводу | 1985 |
|
SU1294731A1 |
| Устройство для транспортирования сыпучих газов | 1988 |
|
SU1546370A2 |
1
Изобретение относится к транспорту и может быть использовано для перемещения различных видов груза.
Известно устройство для транспортирования груза, которое содержит грузонесущую емкость, заключенную в трубу, причем емкость перемещается с помощью местного электродвигателя 1.
Однако данное устройство не позволяет транспортировать различные виды грузов.
Наиболее близким техническим решением к изобретению является устройство для перемещения груза, содержащее смонтированный в несущей трубе транспортирующий рабочий орган, направляющие ролики, размещенные симметрично относительно вертикальной оси несущей трубы, и линейный электродвигатель, статоры которого рас- положены внутри несущей трубы и взаимодействуют с обмотками ротора, при этом транспортирующий рабочий орган
снабжен клиновидными накладками, взаимодействующими с направляющими роликами, а клиновидные накладки выполнены с выступающими пластинами, на которых нанесены обмотки ротора f2J.
Однако область использования данного устройства мала.
Цель изобретения - расширение области использования.
Цель достигается тем, что в уст10ройстве для перемещения груза, содержащем смонтированный в несущей трубе транспортирующий рабочий орган, на.правляющие ролики, размещенные симметрично относительно вертикальной
15 оси несущей трубы, и линейный электродаигатель, статоры которого располояеекы внутри несущей трубы и взаийодействуют с обмотками ротора, при этом траиспортирукнций рабочий орган
20 снабжен клиновидными накладками, взаимодейству)(пцими с направляющими роликами, а клиновидные накладки выполнены с выступаюо(ими пластинами, на
38
которых нанесены обмотки ротора, транспортирующий рабочий орган выполнен в виде грузонесущей разъемной вдоль продольной оси капсулы, а клиновидные накладки с выступающими Пластинами расположены с двух сторон вдоль плоскости разъема.
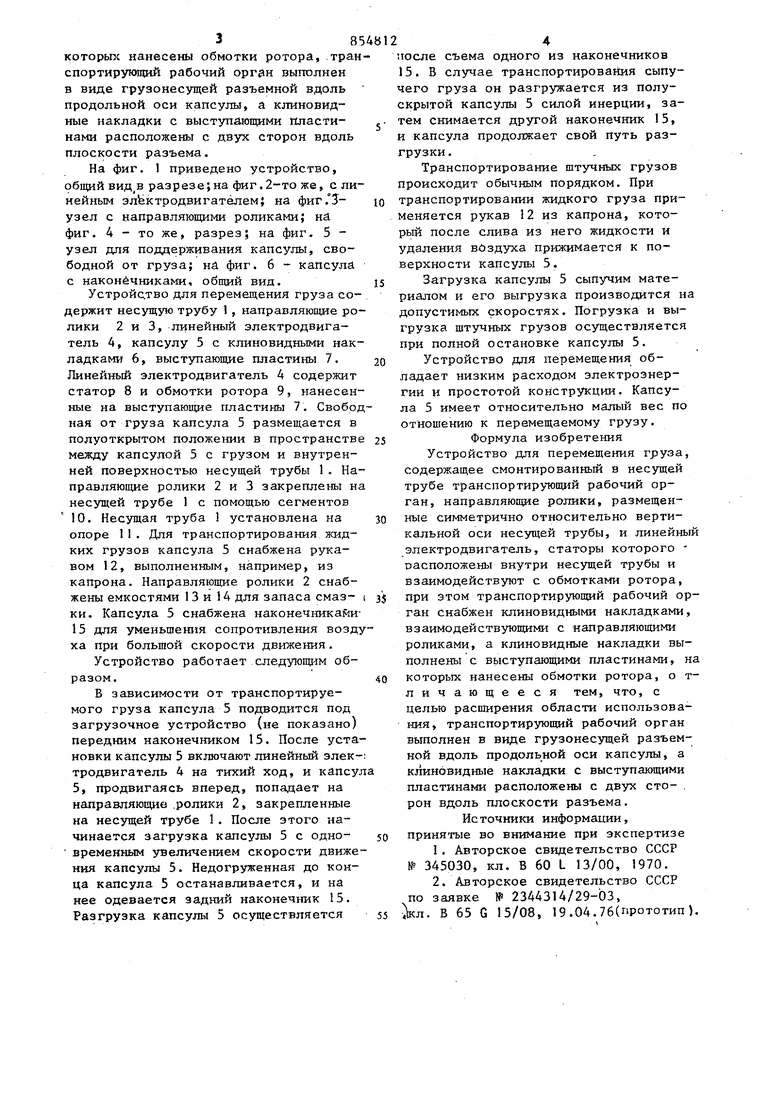
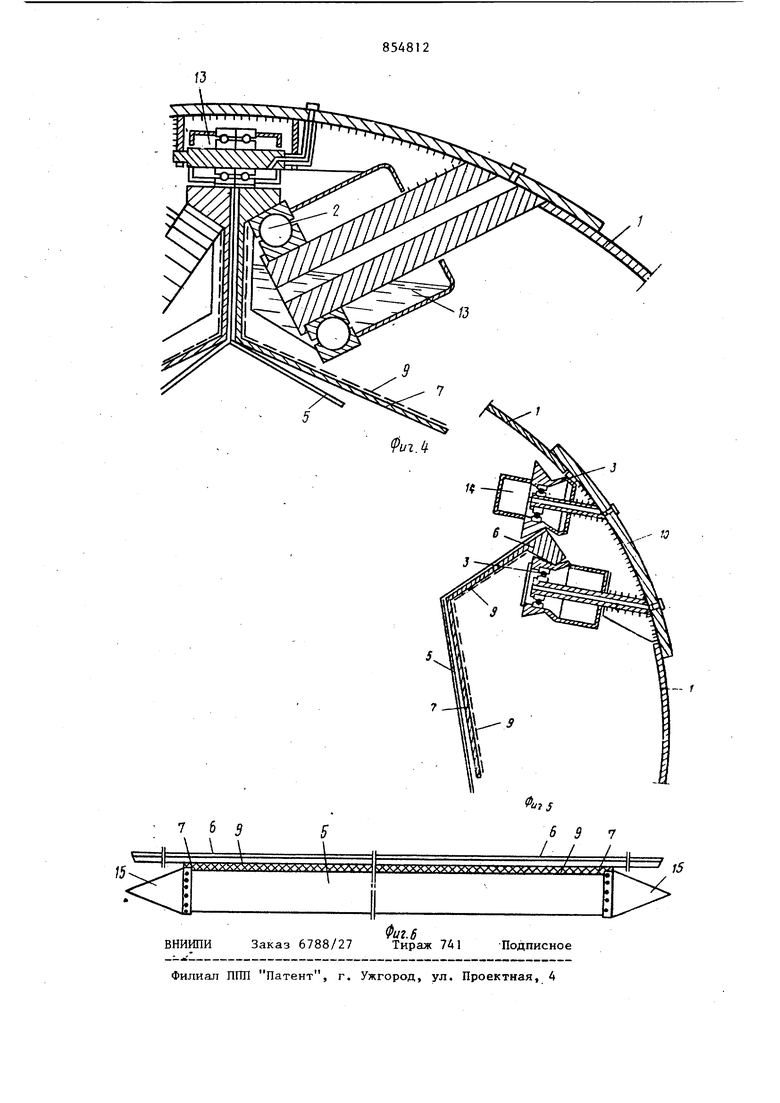
На фиг. 1 приведено устройство, общий разрезе;на фиг.2-то же, с линейным электродвигателем} на фиг.°5узел с направляющими роликами; на фиг. 4 - то же, разрез; на фиг. 5 узел для поддерживания капсулы, свободной от груза; на фиг. 6 - капсула с наконечниками, общий вид.
Устройство для перемещения груза содержит несущую трубу 1 , направляющие ролики 2 и 3, линейный электродвигатель 4, капсулу 5 с клиновидными накладками 6, выступающие пластины 7. Линейный электродвигатель 4 содержит статор 8 и обмотки ротора 9, нанесенные на выступающие пластины 7. Свободная от груза капсула 5 размещается в полуоткрытом положе1даи в пространстве между капсулой 5 с грузом и внутренней поверхностью несущей трубы 1. Направляющие ролики 2 и 3 закреплены на несущей трубе 1 с помощью сегментов 10. Несущая труба 1 установлена на опоре 11, Для транспортирования жидких грузов капсула 5 снабжена рукавом 12, выполненным, например, из капрона. Направляющие роликн 2 снабжены емкостями 13 и 14 для запаса смазки. Капсула 5 снабжена наконечника54и15 для уменьшения сопротивления возду ха при больщой скорости движения.
Устройство работает следующим образом.
В зависимости от транспортируемого груза капсула 5 подводится под загрузочное устройство (не показано) передним наконечником 15. После установки капсулы 5 включают линейный электродвигатель 4 на тихий ход, и капсул 5, продвигаясь вперед, попадает на направляющие .ролики 2, закрепленные на несущей трубе 1. После этого начинается загрузка капсулы 5 с одновременным увеличением скорости движения капсулы 5. Недогруженная до конца капсула 5 останавливается, и на нее одевается задний наконечник 15. Разгрузка капсулы 5 осуществляется
4
после съема одного из наконечников 15. В случае транспортирования сыпучего груза он разгружается из полускрытой капсулы 5 силой инерции, затем снимается другой наконечник 15, и капсула продолжает свой путь разгрузки.
Транспортирование штучных грузов происходит обычным порядком. При транспортировании жидкого груза применяется рукав 12 из капрона, который после слива из него жидкости и удаления вйздуха прижимается к поверхности капсулы 5.
Загрузка капсулы 5 сыпучим материалом и его выгрузка производится на допустимых скоростях. Погрузка и выгрузка штучных грузов осуществляется при полной остановке капсулы 5.
Устройство для перемещения обладает низким расходом электроэнергии и простотой конструкции. Капсула 5 имеет относительно малый вес по отношению к перемещаемому грузу.
Формула изобретения Устройство для перемещения груза, содержащее смонтированньш в несущей трубе транспортирующий рабочий орган, направляющие ролики, размещенные симметрично относительно вертикальной оси несущей трубы, и линейный электродвигатель, статоры которого расположены внутри несущей трубы и взаимодействуют с обмотками ротора, при этом транспортирующий рабочий орган снабжен клиновид№ 1ми накладками, взаимодействующими с направляющими роликами, а клиновидные накладки выполнены с выступающими пластинами, на которых нанесены обмотки ротора, о тличающееся тем, что, с целью расширения области использования, транспортирующий рабочий орган выполнен в виде грузонесущей разъемной вдоль продольной оси капсулы, а клиновидные накладки с выступающими пластинами расположены с двух сто- . рон вдоль плоскости разъема. Источники информации, принятые во внимание при экспертизе
л. В 65 G 15/08, 19.04.76(гфототип).
Фиг.г
