(54) РЕГУЛЯТОР СКОРОСТИ КОЛЕСНО-ТРАНСПОРТНОГО
СРЕДСТВА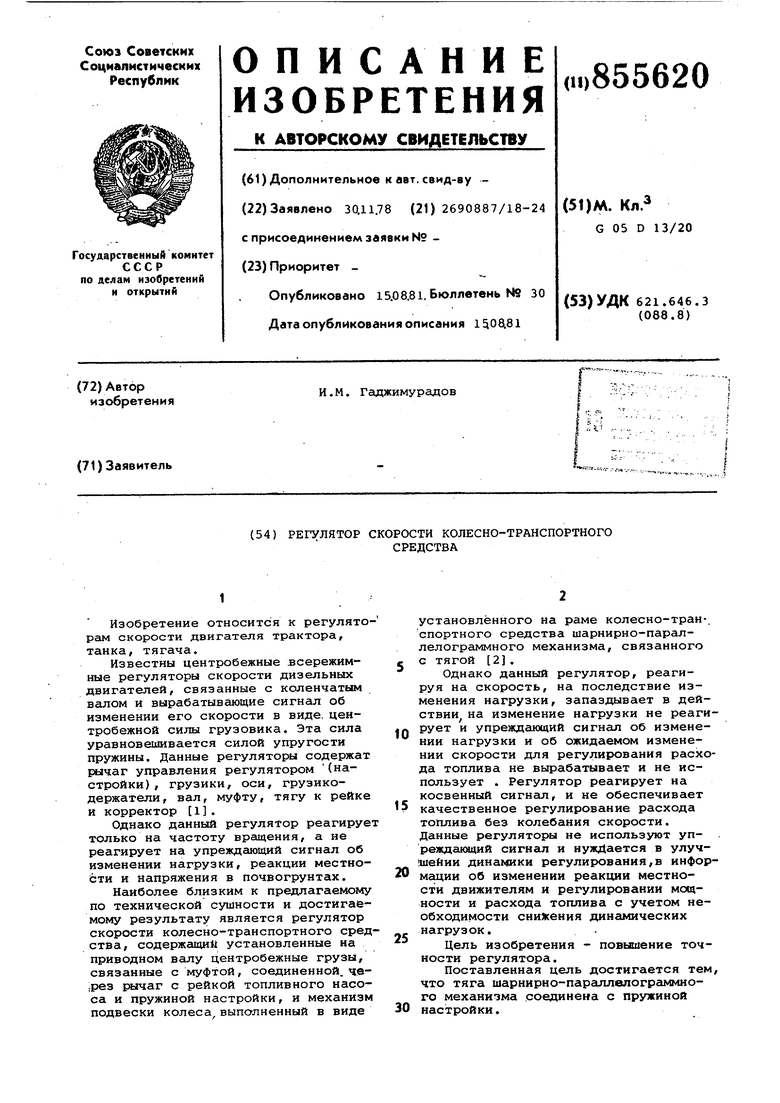
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| Центробежный регулятор | 1976 |
|
SU623191A1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ ТРАНСПОРТНОГО СРЕДСТВА С ПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ | 1991 |
|
RU2022822C1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ С ДУБЛИРУЮЩИМ МЕХАНИЗМОМ РЕГУЛИРОВАНИЯ | 2013 |
|
RU2528237C1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ МОБИЛЬНОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090027C1 |
Изобретение относится к регуляторам скорости двигателя трактора, танка, тягача.
Известны центробежные .всережимные регуляторы скорости дизельных двигателей, связанные с коленчатым валом и вырабатывающие сигнал об изменении его скорости в виде, центробежной силы грузовика. Эта сила уравновешивается силой упругости пружины. Данные регуляторы содержат рычаг управления регулятором (настройки), грузики, оси, груэикодержатели, вал, муфту, тягу к рейке и корректор 1.
Однако данный регулятор реагирует только на частоту вращения, а не реагирует на упреждающий сигнал об изменении нагрузки, реакции местности и напряжения в почвогрунтах.
Наиболее близким к предлагаемся по технической сушности и достигаемому результату является регулятор скорости колесно-транспортного средства, содержсиций установленные на приводном валу центробежные грузы, связанные с муфтой, соединенной. чв.рез 1«чаг с рейкой топливного насоса и пружиной настройки, и механизм подвески колеса выполненный в виде
установленного на раме колесно-тран-. спортного средства шарнирно-параллелограммного механизма, связанного с тягой 2 .
Однако данный регулятор, реагируя на скорость, на последствие изменения нагрузки, запаздывает в действии на изменение нагрузки не реагирует и упреждающий сигнал об измене10нии нагрузки и об ожидаемом изменении скорости для регулирования расхода топлива не вырабатывает и не использует . Регулятор реагирует на косвенный сигнал, и не обеспечивает
15 качественное регулирование расхода топлива без колебания скорости. Данные регуляторы не используют упреждающий сигнал и нуждается в улуч шейии динамики регулирования,в инфор20мации об изменении реакции местности движителям и регулировании мощности и расхода топлива с учетом необходимости снижения динамических нагрузок.
Цель изобретения - повышение точности регулятора.
Поставленная цель достигается тем, что тяга шарнирно-пара.гшвлограммного механизма соединена с пружиной
30 настройки.
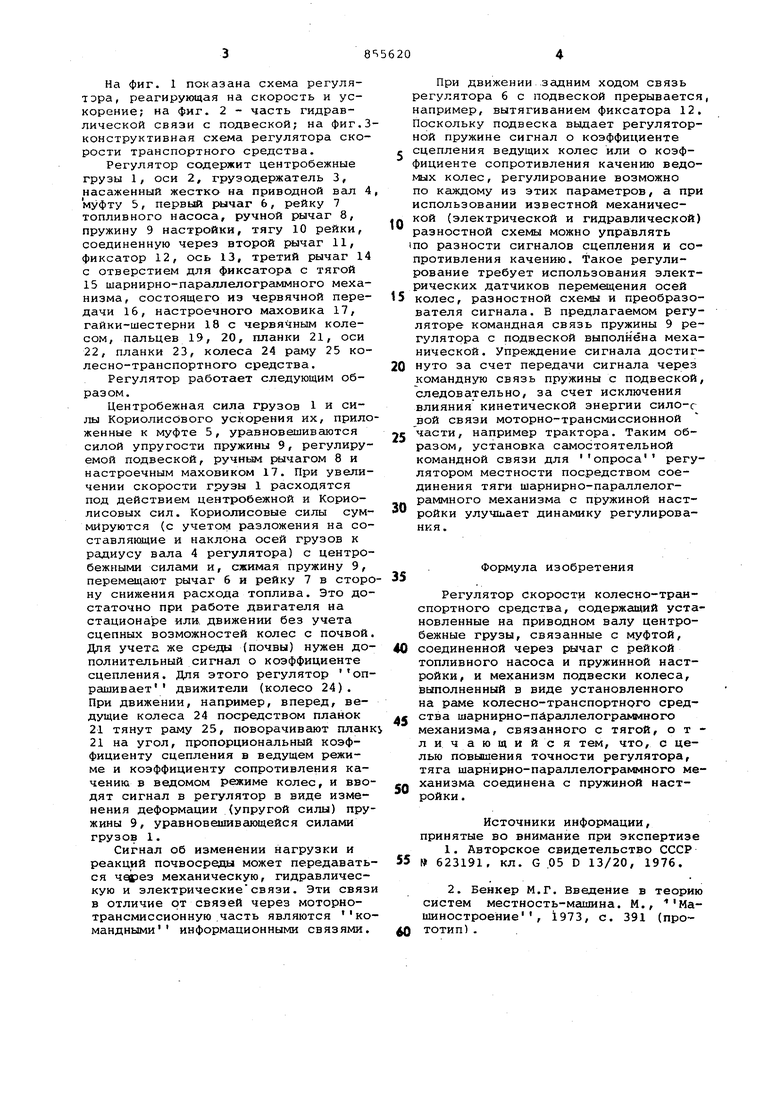
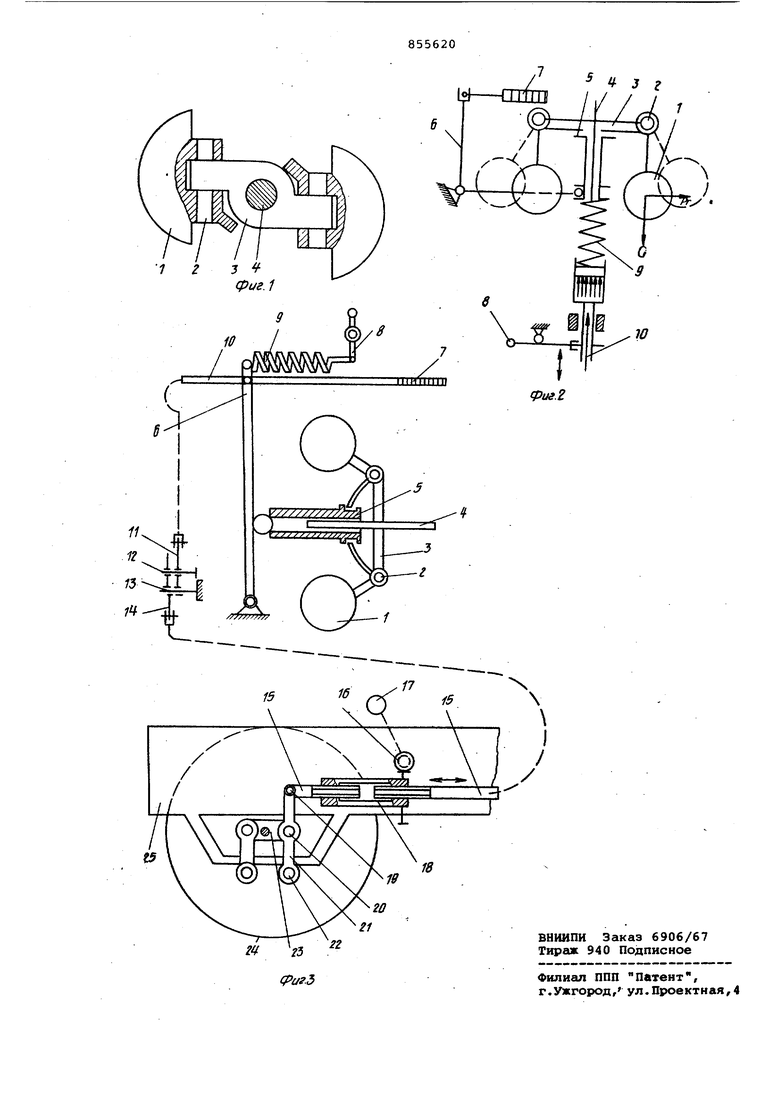
На фиг. 1 показана схема регулятэра, реагирующая на скорость и ускорение; на фиг. 2 - часть гидравлической связи с подвеской; на фиг.Зконструктивная схема регулятора скорости транспортного средства.
Регулятор содержит центробежные грузы 1, оси 2, грузодержатель 3, насаженный жестко на приводной вал 4 муфту 5, первый рычаг 6, рейку 7 топливного насоса, ручной рычаг 8, пружину 9 настройки, тягу 10 рейки, соединенную через второй рычаг 11, фиксатор 12, ось 13, третий рычаг 14 с отверстием для фиксатора с тягой 15 шарнирно-параллелогрс1ммного механизма, состоящего из червячной передачи 16, настроечного маховика 17, гайки-шестерни 18 с червячным колесом, пальцев 19, 20, планки 21, оси 22, планки 23, колеса 24 раму 25 колесно-транспортного средства.
Регулятор работает следующим образом.
Центробежная сила грузов 1 и силы КориолисОвого ускорения их, приложенные к муфте 5, уравновешиваются силой упругости пружины 9, регулируемой подвеской, ручным рычагом 8 и настроечным маховиком 17. При увеличении скорости грузы 1 расходятся под действием центробежной и Кориолисовых сил. Кориолисовые силы суммируются (с учетом разложения на составляющие и наклона осей грузов к радиусу вала 4 регулятора) с центробежными силами и, сжимая пружину 9, перемещают рычаг 6 и рейку 7 в сторону снижения расхода топлива. Это достаточно при работе двигателя на стационаре или,, движении без учета сцепных возможностей колес с почвой. Для учета же среды (почвы) нужен дополнительный сигнал о коэффициенте сцепления. Для этого регулятор опрашивает движители (колесо 24). При движении, например, вперед, ведущие колеса 24 посредством планок 21 тянут раму 25, поворачивают планк 21 на угол, пропорциональный коэффициенту сцепления в ведущем режиме и коэффициенту сопротивления качению1 в ведомом режиме колес, и вводят сигнал в регулятор в виде изменения деформации (упругой силы) пружины 9, уравновешивающейся силами грузов 1.
Сигнал об изменении нагрузки и реакций почвосреды может передаваться чаврез механическую, гидравлическую и электрическиесвязи. Эти связи в отличие от связей через моторнотрансмиссионную .часть являются командными информационными связями.
При движении задним ходом связь регулятора 6 с подвеской прерывается, например, вытягиванием фиксатора 12. Поскольку подвеска выдает регуляторной пружине сигнал о коэффициенте сцепления ведущих колес или о коэффициенте сопротивления качению ведо1 их колес, регулирование возможно по каждому из этих параметров, а при использовании известной механической (электрической и гидравличес.кой) разностной схемы можно управлять шо разности сигналов сцепления и сопротивления качению. Такое регулирование требует использования электрических датчиков перемещения осей
колес, разностной схемы и преобразователя сигнала. В предлагаемом регуляторе командная связь пружины 9 регулятора с подвеской выполнена механической. Упреждение сигнала достигнуто за счет передачи сигнала через командную связь пружины с подвеской, следовательно, за счет исключения влияния кинетической энергии сило-г вой связи моторно-трансмиссионной
части, например трактора. Таким образом, установка самостоятельной командной связи для опроса регулятором местности посредством соединения тяги шарнирно-параллелограммного механизма с пружиной настройки улуч1ьает динамику регулирования.
Формула изобретения
Регулятор скорости колесно-траиспортного средства, содержащий установленные на приводном валу центробежные грузы, связанные с муфтой,
соединенной через рычаг с рейкой топливного насоса и пружинной настройки, и механизм подвески колеса, выполненный в виде установленного на раме колесно-транспортного средства шарнирно-пАраллелограммного
механизма, связанного с тягой, о т личающи и с я тем, что, с целью повышения точности регулятора, тяга шарнирно-параллелограммного механизма соединена с пружиной настройки .
Источники информации, принятые во внимание при экспертизе
