рой выход блока 7. Ключ 24 работает по -алгоритму: при положительном значении скачка вход ключа соединяется с преобразователем 26, при отрицательном - с входом преобразователя 27. Сигнал q поступает на второй вход сумматора 3, вследствие чего начинается разгон исполнительного механизма 6 с максимальной скоростью, на первый вход блока 15 формирования модуля сигна-
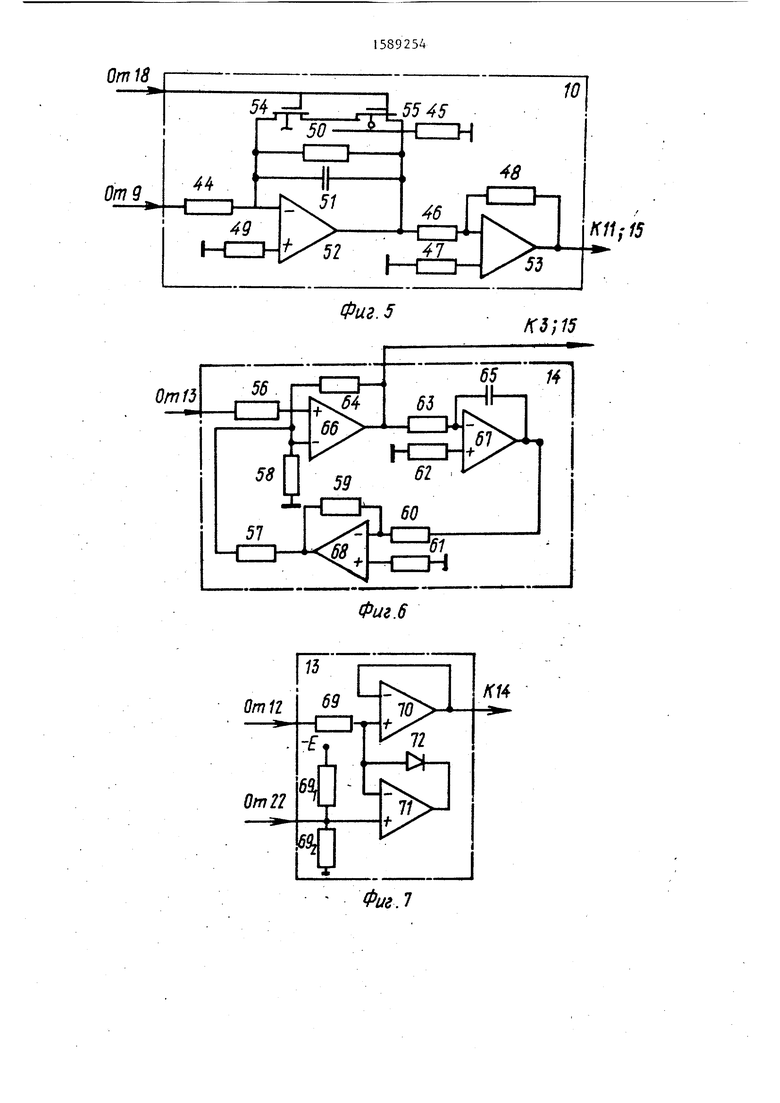
ла, вследствие чего на первом выходе блока 16 компараторов формируется синал о, который проходит через элементы 17-19 и формирует сигнал 1 на втором входе усилителя 8, благода- ря чему подключается сигнал с выхода блока 7 формирования управляющего сигнала на вход сумматора 9 с коэффициентом масщтабирования, определяемым коэффициентом передачи усилителя 8. На второй вход блока 10 формирования начальных условий поступает сигнал О с выхода элемента 18, вследствие чего снимается обнуление блока 10. При этом блок 12 слежения-хранения информации работает в режиме слежения, ключ 13 разомкнут О, поступающим с элемента 22.
На выходе блока 10 формируется переменный во времени амплитуде (при апериодическом звене - экспоненциальный) , пропорциональный значению сигнала q и сигналу с вьпсода усилителя 8, причем его динамической
ЗО ,45
40
вход элемента 22, на выходе которог формируется О, переводящий блок 12 в режим слежения, а ключ 13 - в состояние Выключено, т.е. разомкнутое.
Блок 10 переходит в режим обнуления при появлении на выходе блока 14 ненулевого сигнала, а, значит, О на третьем выходе блока 16 компараторов. При этом усилитель 8 переходит в начальное состояние, так как на его второй вход поступает О, переводящий входной ключ на транзисторах 38 и 39 в разомкнутое состояние. Таким образом, на выходе блока 14 и на третьем входе сумматора 3 формируется Ьйгнал управления на втором интервале управления, переменный по амплитуде и определяемый параметрами блока 14 и значением выходного сигнала сумматора 11 в момент окончания первого интервала управления.
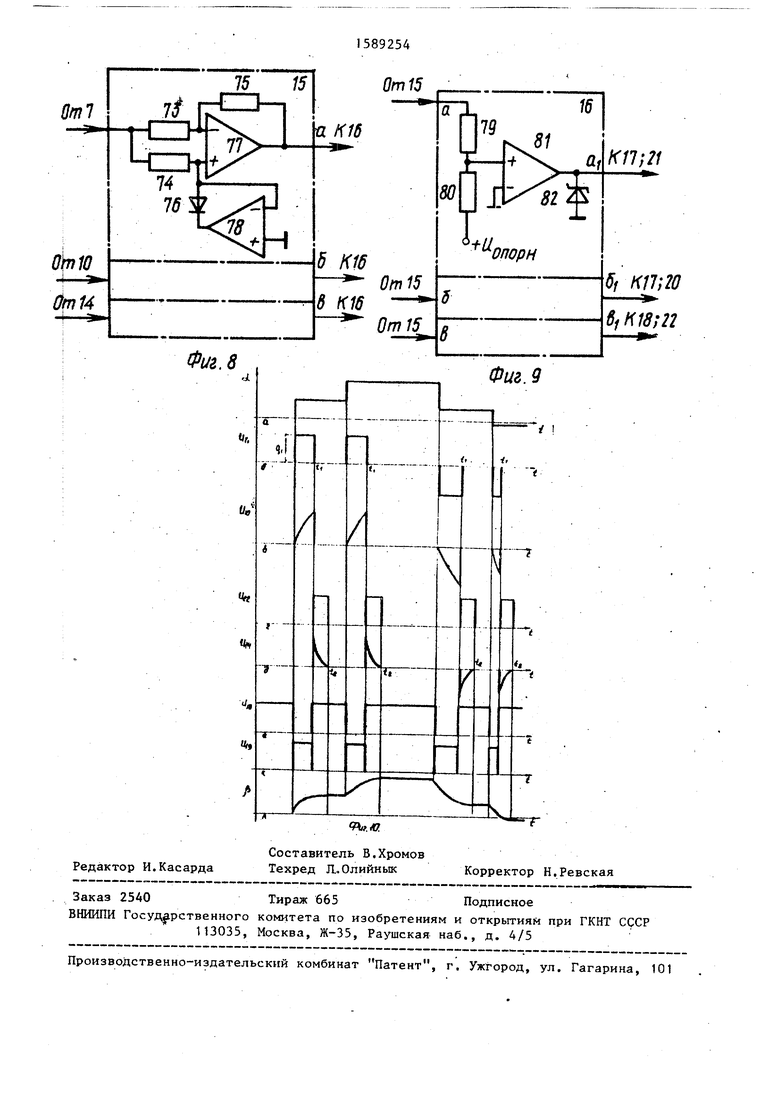
На временной диаграмме работы следящей системы (фиг.10) представлены: а - вариант изменения входного сигна- 0 ла; б - выходной сигнал блока 7 по первому выходу; в - сигнал на выходе блока 10; г - сигнал на выходе элемента 22; д - сигнал на выходе блока 14; е - сигнал на выходе элемента 18; к - сигнал на выходе элемента 19; - сигнал на выходе следящей системы. Например, для следящей системы, передаточная функция которой имеет вид
5
WjCS)
K(T,S + )
/(Tj- T,)/(T2.S +1);
( I)(TS + 1) -К(Тг,- Тз)
W,,(,,- ; W,,;
причем Tj,T ; T, T,; W2 I; W ,
- K,(T;S-H)/S, Ь 1; W K,,/( + W (T,- Т,)5/(Тз5 + 1). )
передаточные функции элементов компен- сационного канала определяютсяСигнал управления, поступающий на
сумматор 3, определяется следующим выW, -l/K; W, 1; W,p К( Т;.,)/ ° ражением
q
t
1
q,(t)
U,(t) t,t t.j, 0
t rt CO .,
0 t t,
T,- Tj -i/r, U,,(t,) t, rt tj,
0,
; j :t c;, ЗТj .
0 t t,
T,- Tj -i/r, U,,(t,) t, rt tj,
0,
; j :t c;, ЗТj .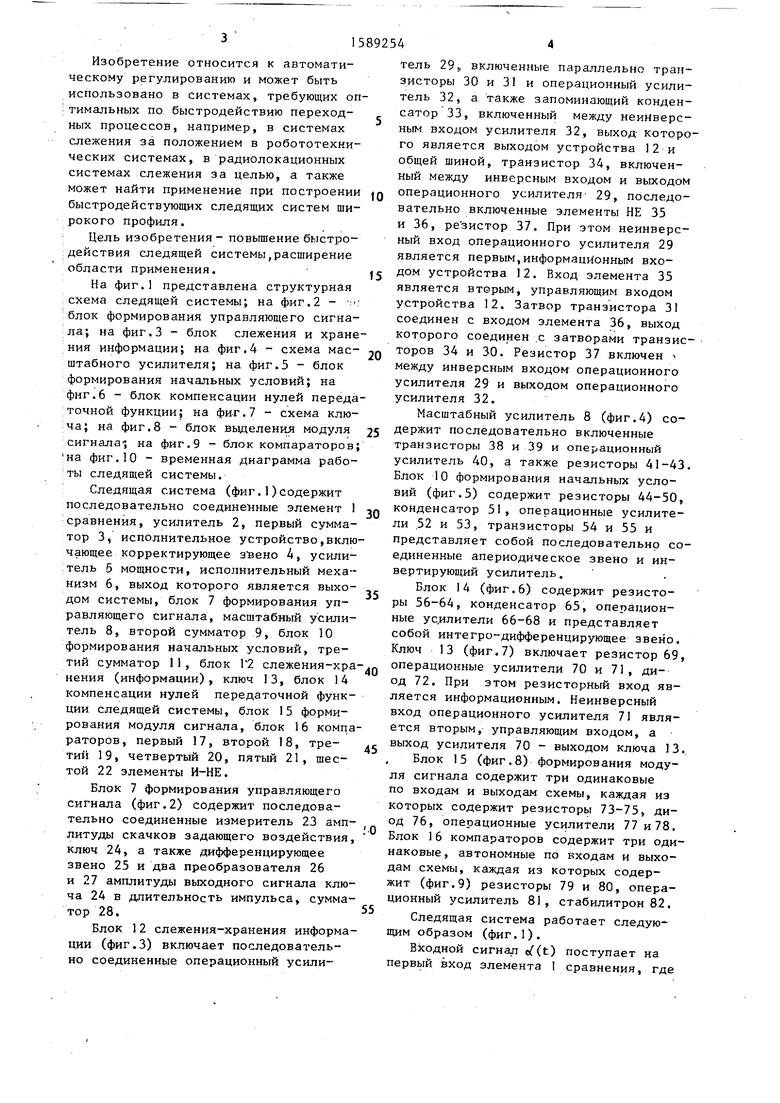
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1985 |
|
SU1325402A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Следящая система | 1988 |
|
SU1529175A2 |
| Следящая система | 1986 |
|
SU1376061A1 |
| Следящая система | 1979 |
|
SU842711A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Следящая система | 1983 |
|
SU1105858A1 |
| Устройство слежения за задержкой псевдослучайного сигнала | 1990 |
|
SU1716614A1 |
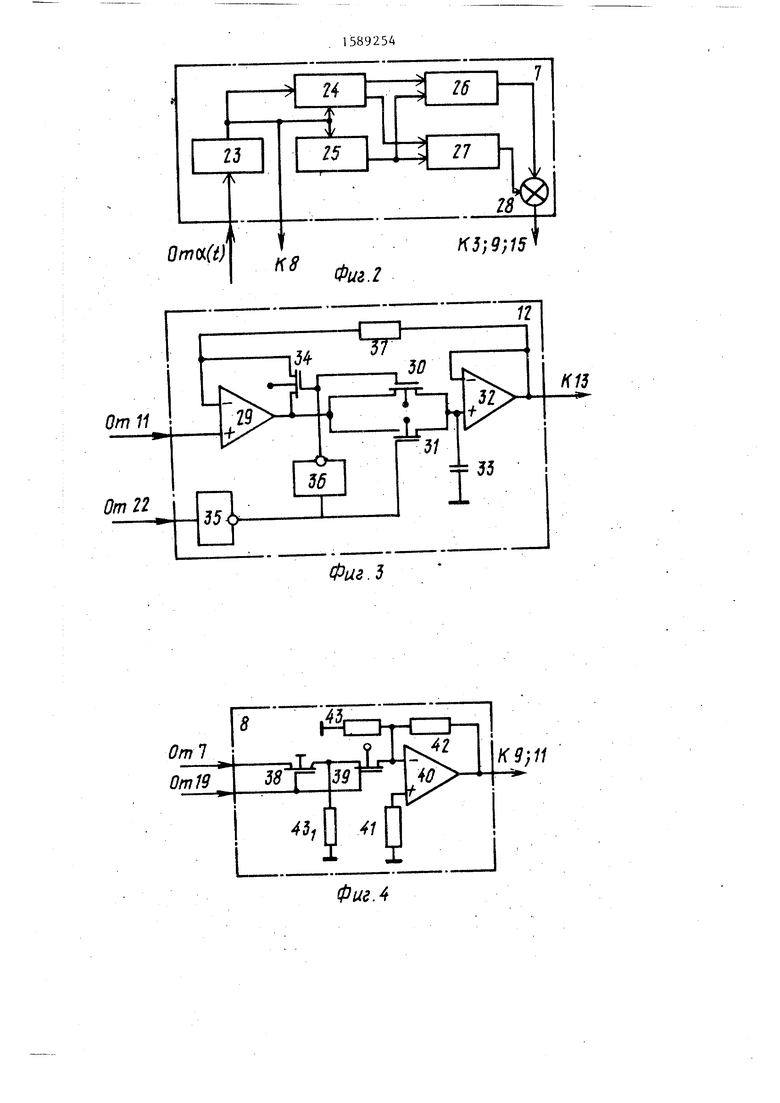
Изобретение относится к технике автоматического регулирования и может быть использовано в системах с оптимальными по быстродействию переходными процессами, например в системах слежения за положением в робототехнических системах, в радиолокационных системах слежения за целью и других следящих системах широкого профиля. Целью изобретения является повышение быстродействия следящей системы и расширение области применения. Следящая система содержит элемент 1 сравнения, усилитель 2, первый сумматор 3, корректирующее звено 4, усилитель мощности 5, исполнительный механизм 6, блок 7 формирования управляющего сигнала, масштабный усилитель 8, второй сумматор 9, блок 10 формирования начальных условий, третий сумматор 11, блок 12 слежения-хранения (информации), ключ 13, блок 14 компенсации нулей передаточной функции следящей системы, блок 15 формирования модуля сигнала, блок 16 компараторов, первый 17, второй 18, третий 19, четвертый 20, пятый 21 и шестой 22 элементы И-НЕ. 10 ил.
Выходной сигнал следящей системы име- ет вид при U(t о
(S)
20
к(т.
sa sTlMTaS 1)
п ., 1
- Тз(Т,3 + l)(Tj,S + 1)
,,
t
o(S)
30
соответствует при U;,, (t)o(
q,K(l +C,e-« i + C., 0 t .t,,
(e - )
/5(t)
U,,(t,)K t -o.t
- о
t,,
I 0(t) ,
где
,--i-; ,-4: c,. Тг
rr
Td
T/
1 Т l/l 1
Следовательно, по быстродействию оптимизируется система без дифферен- циальной составляющей, представляющей нуль передаточной функции,которая компенсируется на втором интервале управления, вследствие чего система, описываемая передаточной функцией, со- держащей нуль, оптимизируется по быстродействию, благодаря чему повышается ее быстродействие.
Таким образом, для обеспечения оптимального по быстродействию управле- ния используются два интервала управления: первый, на котором амплитуда сигнала управления постоянная, и второй, на котором амплитуда сигнала ,,
t
t,, .
)
о
t,,
t5,0:3T3,
равления изменяется во времени (уменьшается по абсолютной величине) и так как по отношению-к второму и третьему входам первого сумматора система является интегро-дифференцирующей, т.е. содержащей в передаточной функции нули, разгону системы под действием управляющего сигнала первого интервала помогает дифференцирующая составляющая, для компенсации которой на втором интервале управления формируется переменный по амплитуде сигнал блоком компенсации нулей передаточной функции.
Благодаря этому в следящей системе исключается перерегулирование, которое всегда присутствует при наличии дифференциальной компоненты в правой части дифференци;1льного уравнения, описыва ющего следующую систему, соответствующей нулю передаточной функции системы, и следящая система станвится оптимальной по быстродействию в переходном , а в установившемся - имеет высокую точность за счет наличия интегральной составляющей в передаточной функции корректирующего звена, вследствие чего повышается качество следящей системы при повышении ее быстродействия за счет введения режима оптимального быстродействия для систем, описываемых передаточной функцией, содержащей нули.
Таким образом, в предлагаемой еле- дящей системе по сравнению с прототипом повьшено быстродействие за счет применения оптимального по быстродействию управления при расширении ее
технических возможностей за счет вве
дения компенсационного канала, позволяющего оптимизировать по быстродействию следящие системы с ПИД-регу- лятерами в контуре или системы, объект управления которых описывает- ся передаточной функцией, содержащей нули, благодаря чему повышается быстродействие следящей системы при расширении ее технических возможностей,
Формула изобретения
Следящая система, содержащая элемент сравнения, суммирующий ход которого является задающим входом системы и соединен с входом блока формирования управляющего сигнала, выход элемента сравнения через усилитель подключен к первому входу перног-о сумматора, выход первого сумматора через последовательно соединенные корректирующее звено и усилитель мощности подключен к входу исполнительного механизма, выход которого является выходом системы и соединен с вычитаюпдам входом элемента сравнения, первый выход блока формирования управляющего сигнала связан с вторым входом первого) сумматора, отли чающаяся тем, что, с целью повьшшния быстродействия и расширения области применения, в нее дополнительно введены, блок компараторов, блок формирователей модуля сигнала, масштабный усилитель, второй и третий сумматоры,блок
,Q |с
20
5
5
0
,. ,
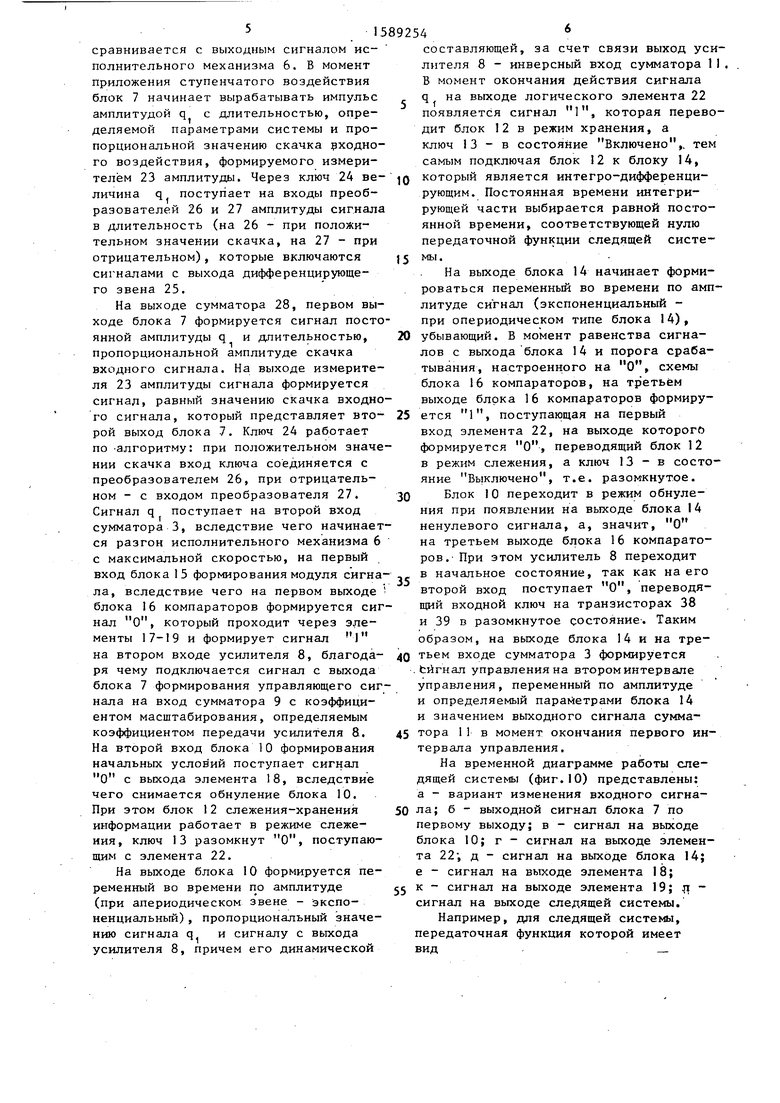
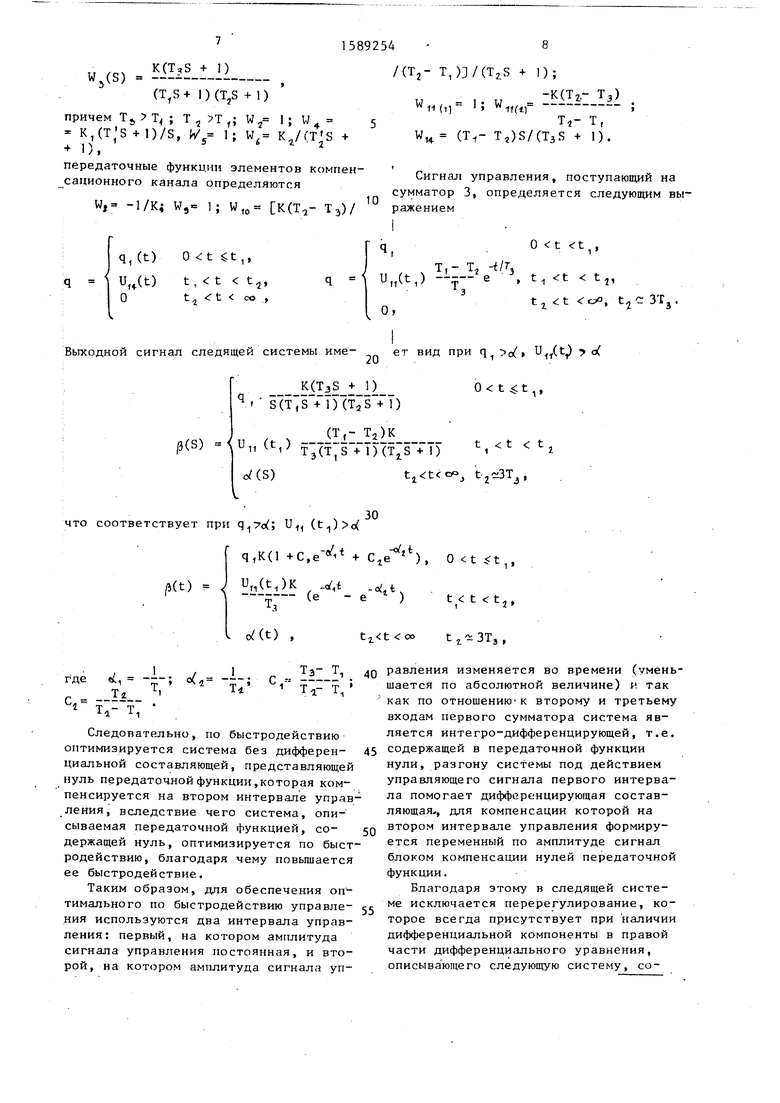
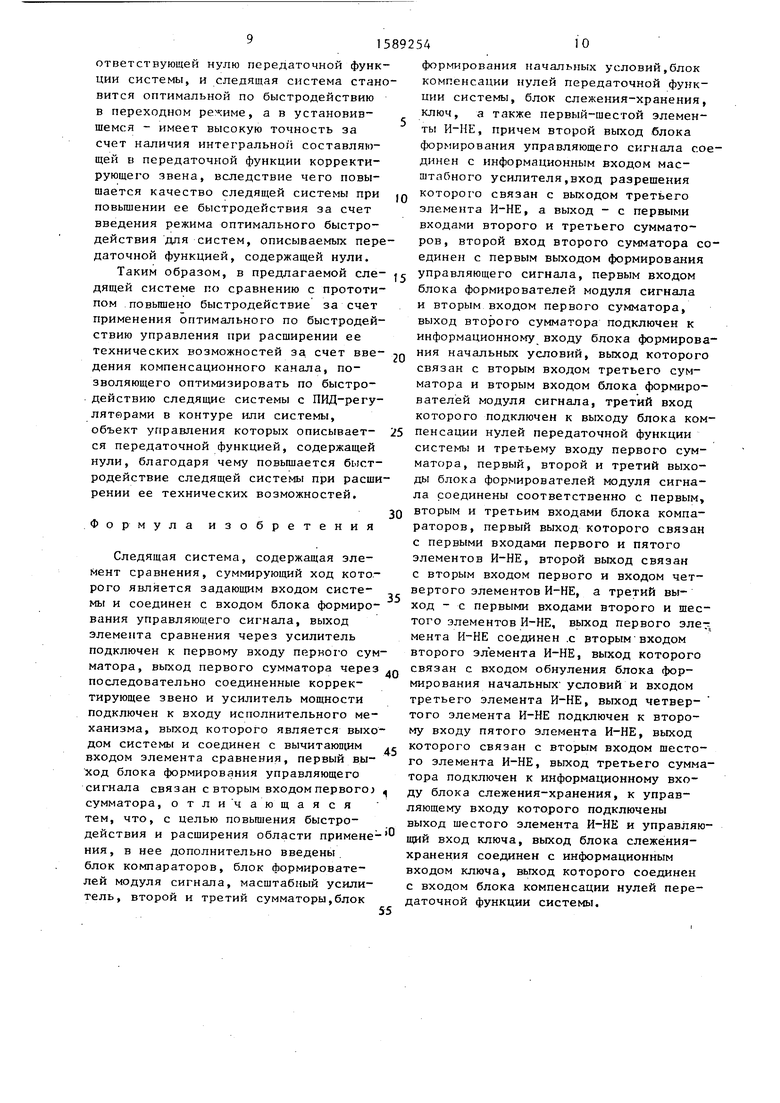
формирования начальных условий,блок компенсации нулей передаточной функции системы, блок слежения-хранения, ключ, а также первый-шестой элементы И-НЕ, причем второй выход -блока формирования управляющего сигнала соединен с информационным входом масштабного усилителя,вход разрешения которого связан с выходом третьего элемента И-НЕ, а выход - с первыми входами второго и третьего сумматоров, второй вход второго сумматора соединен с первым выходом формирования управляющего сигнала, первым входом блока формирователей модуля сигнала и вторым входом первого сумматора, выход второго сумматора подключен к информационному входу блока формирования начальных условий, выход которого связан с вторым входом третьего сумматора и вторым входом блока формирователей модуля сигнала, третий вход которого подключен к выходу блока компенсации нулей передаточной функции системы и третьему входу первого сумматора, первый, второй и третий выходы блока формирователей модуля сигнала соединены соответственно с первым, вторым и третьим входами блока компараторов, первый выход которого связан с первыми входами первого и пятого элементов И-НЕ, второй выход связан с вторым входом первого и входом четвертого элементов И-НЕ, а третий выход - с первыми входами второго и шестого элементов И-НЕ, вькод первого элет мента И-НЕ соединен .с вторым входом второго элемента И-НЕ, выход которого связан с входом обнуления блока формирования начальных условий и входом третьего элемента И-НЕ, выход четвер- того элемента И-НЕ подключен к второму входу пятого элемента И-НЕ, выход которого связан с вторым входом шестого элемента И-НЕ, вьпсод третьего сумматора подключен к информационному входу блока слежения-хранения, к управляющему входу которого подключены выход шестого элемента И-НЕ и управляющий вход ключа, выход блока слежения- хранения соединен с информационным входом ключа, выход которого соединен с входом блока компенсации нулей передаточной функции системы.
Гс
11
29
-|J4
-к
5
От 22
55 J
Фиг. 5
От
О т 19
«;&i/.
52
/Г/5
От 18
OmQ
Фиг. 5
От 15
ФиеЛ
Kllf 15
К 5)15
Фиг.6
75 15
7
Z1
77
a Kid a
74
76 5
tibtW (14
в K16
Фиг, 8
Sf КЛ;20
a
eiK18j22
| Зайцев Г.Ф., Стеклов В.К | |||
| Квазиоптимальные следящие системы | |||
| Киев: Вища школа, 1981, с.72, рис.3.1 а. |
