(54) ПОДЪЕМНО-ПОВОРОТНОЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ МОНТАЖА-ДЕМОНТАЖА СЕКЦИЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1994 |
|
RU2064586C1 |
| Подъемно-поворотное устройство | 1974 |
|
SU546536A1 |
| ЗАХВАТ КЛАСТЕРА УПРАВЛЯЮЩИХ ЭЛЕМЕНТОВ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК РЕАКТОРА | 2017 |
|
RU2660946C1 |
| Механизированный стеллаж | 1982 |
|
SU1039823A1 |
| Устройство для замены питающих паковокНА КРуТильНО-ВыТяжНыХ МАшиНАХ | 1976 |
|
SU842113A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2530904C2 |
| Устройство для упаковывания в пленку штучных предметов с острой кромкой | 1986 |
|
SU1375508A1 |
| Устройство для транспортировки и передачи изделий | 1987 |
|
SU1475871A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ПУТЕУКЛАДОЧНЫЙ КРАН | 2000 |
|
RU2193617C2 |
I
Изобретение относится к транспортированию изделий и может быть использовано для подачи деталей и сборочных единиц к технологическому оборудованию в поточных и механизированных линиях.
Известно устройство для загрузки и разгрузки изделий, включающее телескопическую стойку с гидроцилиндром подъема, на выдвижной части которой смонтирована траверса с захватом и ролик, который контактирует с У-образным копириым пазом на неподаижной части стойки и с подпружиненными отсекателем и защелкой, которые направляют ролик по копирным пазам 1.
Недостатками этого устройства являются его большие размеры по высоте, так как yiликдр и стойка установлены соосно, и сложность конструкции механизма направления рюлика по различным пазам, требующая точности изготовления деталей.
Наиболее близким к предлагаемому является подъемно-поворотное устройство, содержащее раму с закрепленными на ней приводом подъема и корпусом, снабженным пальцем, в
корпусе установлен шток с возможностью возвратно-поступательного движения, выполненный с грузовым захватом на конце и пазом на боковой поверхности, с которым взаимодействует палец корпуса 2.
Однако зто устройство обладает малой технологичностью, так как можно спускать или поднимать груз с одновременным его поворотом и нельзя вьтолнять эти операции отдельно.
Цель изобретения - расширение технологических возможностей устройства.
Для достижения указанной цели подъемноповоротное устройство, содержащее раму с закрепленными на ней приводом подъема и корпусом, снабженным пальцем, в корпусе установлен шток с возможностью возвратно-поступательного движения, вьшолненный с грузовым захватом на конце и пазом на боковой поверхности, с которьгм взаимодействует палец корпуса, снабжено дополнительным пальцем, закрепленным на корпусе и взаимодействующим с пазом, причем оба пальца установлены с возможностью перемещения вдоль сиоей прюдольной оси.
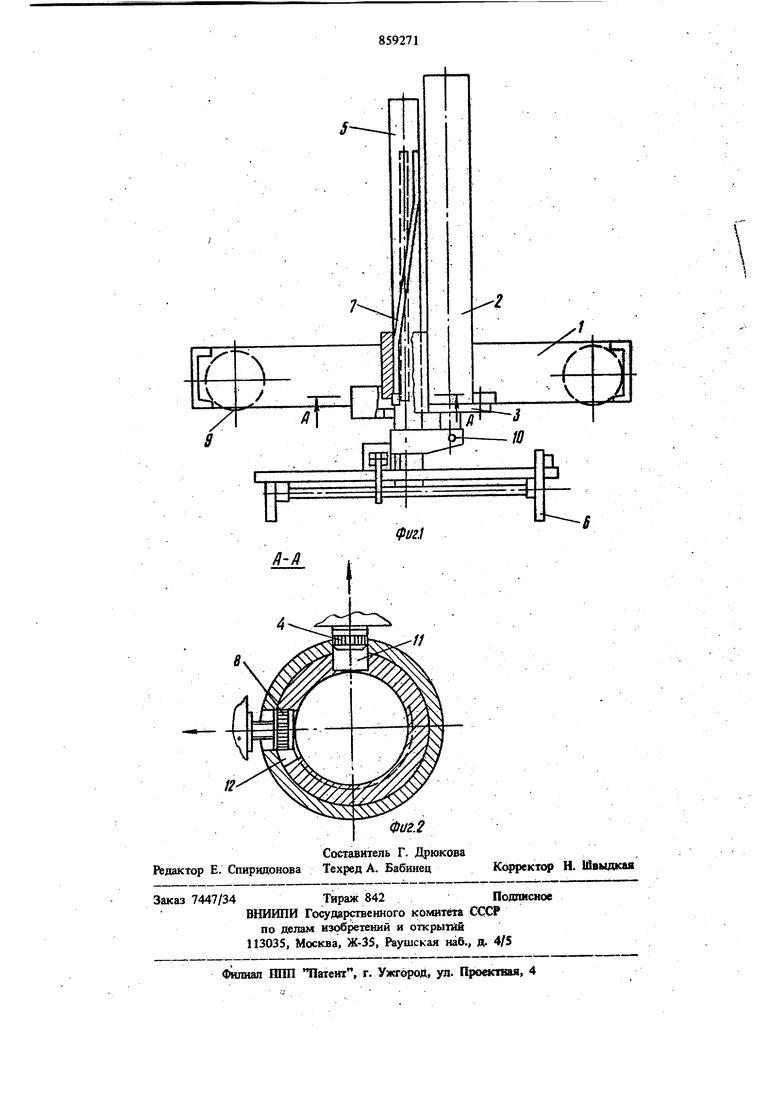
На фиг. 1 приведено устройство, общий вид; на фиг, 2 - разрез А-А на фиг. 1.
Подъемно-транспортное устройство содержит ряму 1, привод 2 подъема, корпус 3, палец 4, шток 5 jc грузовым захватом 6 и пазом 7 на боковш поверхности штока 5, дополнительный палец 8, закрепленный на корпусе 3.
1 имеет колеса 9, корпус. 3 жестко закреплен на раме 1, привод 2 подъема соединен консолък Ю со штоком 5.
Палец 4 и дополнительный палец 8 вьшолнены, например, в виде роликов.
Паз 7 ка боковой поверхности штока 5 выполнен, например, с прямолинейным 11 и криволинейным 12 участками, а палец 4 и дополнительный палец 8 контактируют соответственно с этими участками.
Устройство работает следунлцим образом.
После выключения привода 2 подъема, соединенного консолью 10 со штоком 5, захват 6 начинает опускаться. При этом палец 4 находится в прямолинейном 11 участке паза 7, а дополиите1П.ный палец вынут из криволинейного 12 участка паза 7, вследствие чего захват 6 опускается прямолинейно. В нюкнем положении захват 6 захватывает изделие. Далее захват 6 поднимается, устройство перемещается к месту укладки и, по программе, в зависимости от того, нужно ли сохранить положение груза или его необходимо развернуть, подается команда на опускание по тому же участку паза или по другому.
В первом случае палец 4 остается в прямолинейном участке 11 паза 7. Во втором - до опускания палец 4 выдвигается из прямолинейного участка 11 раза 7, а дополнительный палец 8 одновременно вдвигается в криволинейный участок 12 паза 7. В нижнем положении захват 6 кладет изделие, поднимается, и устройство возвращается в исходное положение.
Преимущества предлагаемого устройства заключаются в том, что уменьшен его габарит по высоте, устройство переносит изделие на любое расстояние, изделие поворачивается в горизонтальной плоскости на любой угол.
Формула изобретения
Подъемно-поворотное устройство, содержащее раму с закрепленными на ней приводом подъема и корпусом, снабженным пальцем, в корпусе установлен аггок с возможностью возBpatHo-поступательного движения, выполненный с грузовым захватом на конце и пазом на боковой поверхности, с которым взаимодействует палец корпуса, отличающийся тем, что, с целью расширения технологических возможностей устройства, оно снабжено дополнительным пальцем, закрепленным на корпусе и взаимодействующим с пазом, причем оба пальца установлены с возможностью перемещения вдоль своей продольной оси.
Источники информации, принятые во внимание при экспертизе
2,Авторское свидетельство СССР N 546536, кл. В 65 G 47/22, 1974 (прототип).
