ОО СО 00 1чЭ
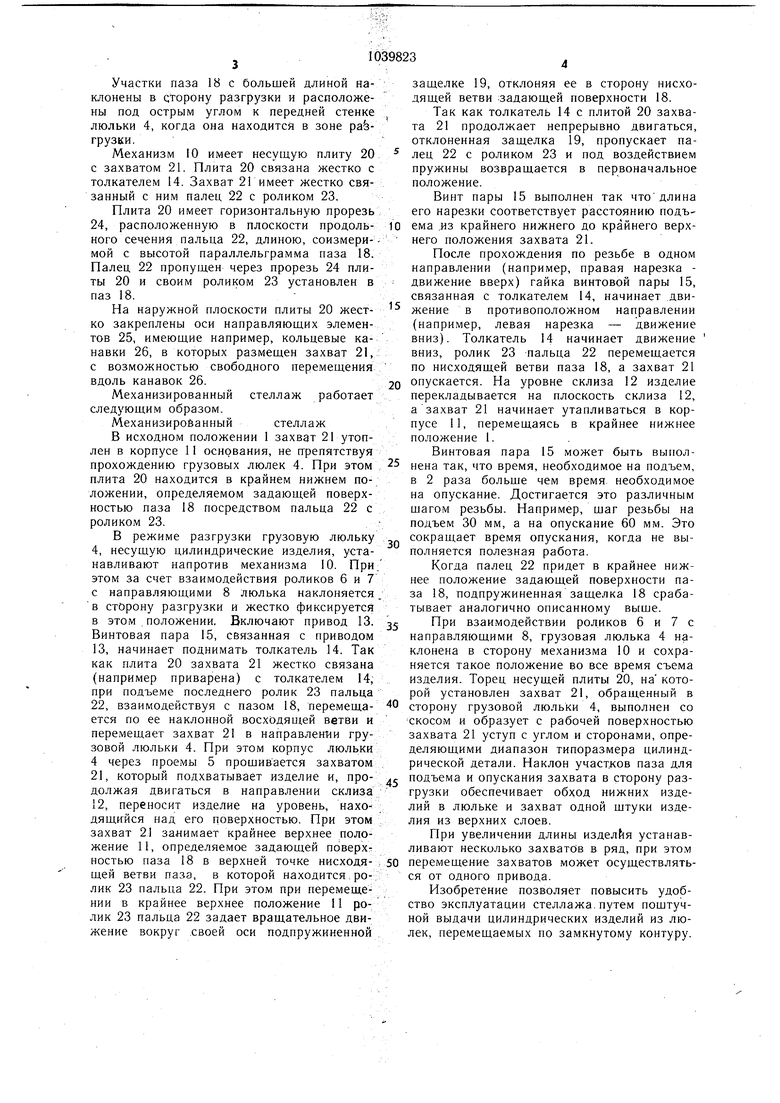
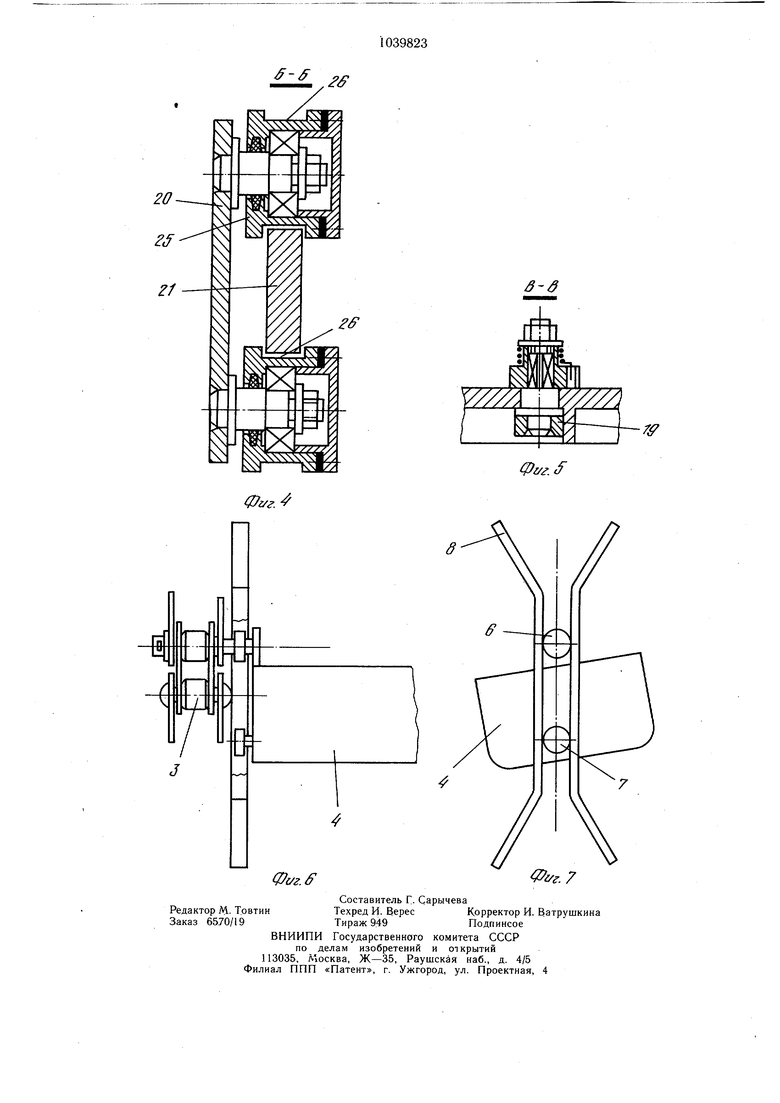
ОО Изобретение относится к оборудованию складов, в частности к механизированным стеллажам. Известно устройство для хранения цилиндрических изделий, содержащее емкость, в которую уложены цилиндрические изделия, и механизм поштучной выдачи, включающий подвижные рычаги для захвата и выдачи изделий, причем передняя стенка емкости выполнена криволинейной 1. Это устройство имеет сложную конструкцию и приспособлено для хранения изделий только в одной емкости. При увеличении количества емкостей, количество механизмов поштучной выдачи должно быть увеличено. Кроме того, известный механиз.м пощтучной выдачи требует усложнения конструкции емкости из-за необходимости выполнения ее передней стенки криволинейной формы. Известен также механизированный стеллаж, содержащий каркас с огибаемыми тяговыми цепями звездочками, люльки, шарнирно прикрепленные к цепям посредством осей и имеющие проемы в каждом дне и в передней стенке со стороны разгрузки, и грузовой захват, установленный в зоне разгрузки на основании, с возможностью захода в проемы люлек посредством механизма перемещения 2J. Данный стеллаж обеспечивает перемещение емкостей люлек по замкнутому контуру и обеспечивает разгрузку изделий одним захватом, установленным в месте разгрузки. Однако этот стеллаж не обеспечивает поштучной выдачи цилиндрических изделий и обеспечивает только пакетную разгрузку, что требует дополнительных механизмов для поштучной -переработки цилиндрических изделий. Наличие дополнительных механизмов или необходимость ручного труда для поштучной переработки цилиндрических изделий снижает удобство эксплуатации стеллажи. Целью изобретения является повышение удобства эксплуатации. Цель достигается тем, что-в механизированном стеллаже, содержащем каркас с огибаемыми тяговыми цепями звездочками, люльки, щарнирно прикрепленные к цепям посредством осей и имеющие прое.мы в каждом дне и в передней стенке со стороны разгрузки, и грузовой захват, установленный в зоне разгрузки на основании. с возможностью захода в проемы люлек посредством механизма перемещения, люльки снабжены роликами, одни из которых прикреплены к концам их осей, а другие к боковым стенкам в их нижней части,-)со смещением относительно первых роликов в сторону разгрузки, а на каркасе напротив боковых стенок люлек в зоне разгрузки смонтированы направляющие для роликов, при этом механизм перемещения грузового захвата представляет собой подъемноопускную от винтового привода несущую плиту с горизонтальной прорезью и направляющими элементами, в которых установлен упомянутый грузовой захват, имеющий палец, размещенный в указанной прорези, а в основании выполнен паз в форме параллелограмма и в местах пересечения участков паза по больщей диагонали закреплены защелки, причем участки паза с больщей длиной наклонены в сторону разгрузки и расположены под острым углом к передней стенке люльки в зоне разгрузки, а на конце пальца грузового захвата смонтирован ролик, размещенный в указанном пазу. Кроме того, торец несущей плиты, обращенный к люльке может иметь скос. На фиг. 1 схематически изображен механизированный стеллаж; на фиг. 2 - устройство для поштучной выдачи цилиндрических изделий и грузовая люлька, вид; на фиг. 3 - палец с роликом, установленным на задающей поверхности копира (разрез А-А на фиг. 2); на фиг. 4 - соединение рабочего органа с плитой посредством направляющих элементов (разрез 5-Б на фиг. 2); на фиг. 5 - подпружиненная защелка (разрез В-В на фиг. 2); на фиг. 6 - соединение люльки с цепью; на фиг. 7 - люлька с роликом и направляющие в момент их взаимодействия. Механизированный стеллаж состоит из каркаса 1 с ограждением, (не показано) на котором закреплены звездочки 2 с огибающими тяговыми цепями 3. К цепям 3 шарнирно подвещены грузовые люльки, имеющие в своем корпусе 4 проем 5. На торцах корпуса 4 люлек, установлены ролики 6 и 7, так, что ось верхнего ролика 6 совпадает с осью звена цепи 3, а ось нижнего ролика 7 смещена относительно оси торца корпуса люльки 4 в сторону проема 5. На каркасе 1 в районе съема изделия со стороны стеллажа закреплены направляющие 8, взаимодействующие с роликами б и 7 люлек 4. Механизированный стеллаж оборудован установленным на основании 9 механизмом 10 для выдачи цилиндрических изделий. Основание 9 состоит из корпуса 11, верхняя сторона которого выполнена в виде наклонного склиза 12. На корпусе II смонтирован привод 13 связанный с толкателем 14 посредством винтовой пары 15. С противоположной стороны толкатель 14 центрируется с отверстием 16 выполненным в верхней части основания. В основании 9 выполнен замкнутый фигурный паз 18, который образует задающую поверхность копира 17. Фигурный паз 18 выполнен в виде параллелограмма, в вершинах которого симметрично смонтированы подпружиненные защелки 19. Участки паза 18 с большей длиной наклонены в сторону разгрузки и расположены под острым углом к передней стенке люльки 4, когда она находится в зоне разгрузки. Механизм 10 имеет несущую плиту 20 с захватом 21. Плита 20 связана жестко с толкателем 14. Захват 21 имеет жестко связанный с ним палец 22 с роликом 23. Плита 20 имеет горизонтальную прорезь 24, расположенную в плоскости продольного сечения пальца 22, длиною, соизмеримой с высотой параллельграмма паза 18. Палец 22 пропущен через прорезь 24 плиты 20 и своим роликом 23 установлен в паз 18. На наружной плоскости плиты 20 жестко закреплены оси направляющих элементов 25, имеющие например, кольцевые канавки 26, в которых размещен захват 21, с возможностью свободного перемещения вдоль канавок 26. Механизированный стеллаж работает следующим образом. Механизиробанныйстеллаж В исходном положении 1 захват 21 утоплен в корпусе 11 основания, не препятствуя прохождению грузовых люлек 4. При этом плита 20 находится в крайнем нижнем положении, определяемом задающей поверхностью паза 18 посредством пальца 22 с роликом 23. В режиме разгрузки грузовую люльку 4, несущую цилиндрические изделия, устанавливают напротив механизма 10. При этом за счет взаимодействия роликов 6 и 7 с направляющими 8 люлька наклоняется в сторону разгрузки и жестко фиксируется в этом положении. Включают привод 13. Винтовая пара 15, связанная с приводом 13, начинает поднимать толкатель 14. Так как плита 20 захвата 21 жестко связана (например приварена) с толкателем 14, при подъеме последнего ролик 23 пальца 22, взаимодействуя с пазом 18, перемещается по ее наклонной восходящей ветви и перемещает захват 21 в направлении грузовой люльки 4. При этом корпус люльки 4 через проемы 5 прощивается захватом 21, который подхватывает изделие и, продолжая двигаться в направлении склиза 12, переносит изделие на уровень, находящийся над его поверхностью. При этом захват 21 занимает крайнее верхнее положение 11, определяемое задающей поверхностью паза 18 в верхней точке нисходящеи ветви паза, в которой находится.ролик 23 пальца 22. При этом при перемещении в крайнее верхнее положение 11 ролик 23 пальца 22 задает вращательное движение вокруг .своей оси подпружиненной
ся от одного привода.
Изобретение позволяет повысить удобство эксплуатации стеллажа, путем пощтучной выдачи цилиндрических изделий из люлек, перемещаемых по замкнутому контуру. защелке 19, отклоняя ее в сторону нисходящей ветви задающей поверхности 18. Так как толкатель 14 с плитой 20 захвата 21 продолжает непрерывно двигаться, отклоненная защелка 19, пропускает палец 22 с роликом 23 и под воздействием пружины возвращается в первоначальное положение. Винт пары 15 выполнен так чтодлина его нарезки соответствует расстоянию подъема .из крайнего нижнего до крайнего верхнего положения захвата 21. После прохождения по резьбе в одном направлении (например, правая нарезка движение вверх) гайка винтовой пары 15, связанная с толкателем 14, начинает движение в противоположном направлении (например, левая нарезка - движение вниз). Толкатель 14 начинает движение вниз, ролик 23 пальца 22 перемещается по нисходящей ветви паза 18, а захват 21 опускается. На уровне склиза 12 изделие перекладывается на плоскость склиза 12, а захват 21 начинает утапливаться в корпусе 11, перемещаясь в крайнее нижнее положение 1. Винтовая пара 15 может быть выполнена так, что время, необходимое на подъем, в 2 раза больше чем время необходимое на опускание. Достигается это различным щагом резьбы. Например, шаг резьбы на подъем 30 мм, а на опускание 60 мм. Это сокращает время опускания, когда не выполняется полезная работа. Когда палец 22 придет в крайнее нижнее положение задающей поверхности паза 18, подпружиненная защелка 18 срабатывает аналогично описанному выше. При взаимодействии роликов 6 и 7 с направляющими 8, грузовая люлька 4 наклонена в сторону механизма 10 и сохраняется такое положение во все время съема изделия. Торец несущей плиты 20, на которой установлен захват 21, обращенный в сторону грузовой люльки 4, выполнен со скосом и образует с рабочей поверхностью захвата 21 уступ с углом и сторонами, определяющими диапазон типоразмера цилиндрической детали. Наклон участков паза для подъема и опускания захвата в сторону разгрузки обеспечивает обход нижних изделий в люльке и захват одной щтуки изделия из верхних слоев. При увеличении длины изделия устанавливают несколько захватов в ряд, при этом перемещение захватов может осуществлять-/
Ф(/г./
уг.г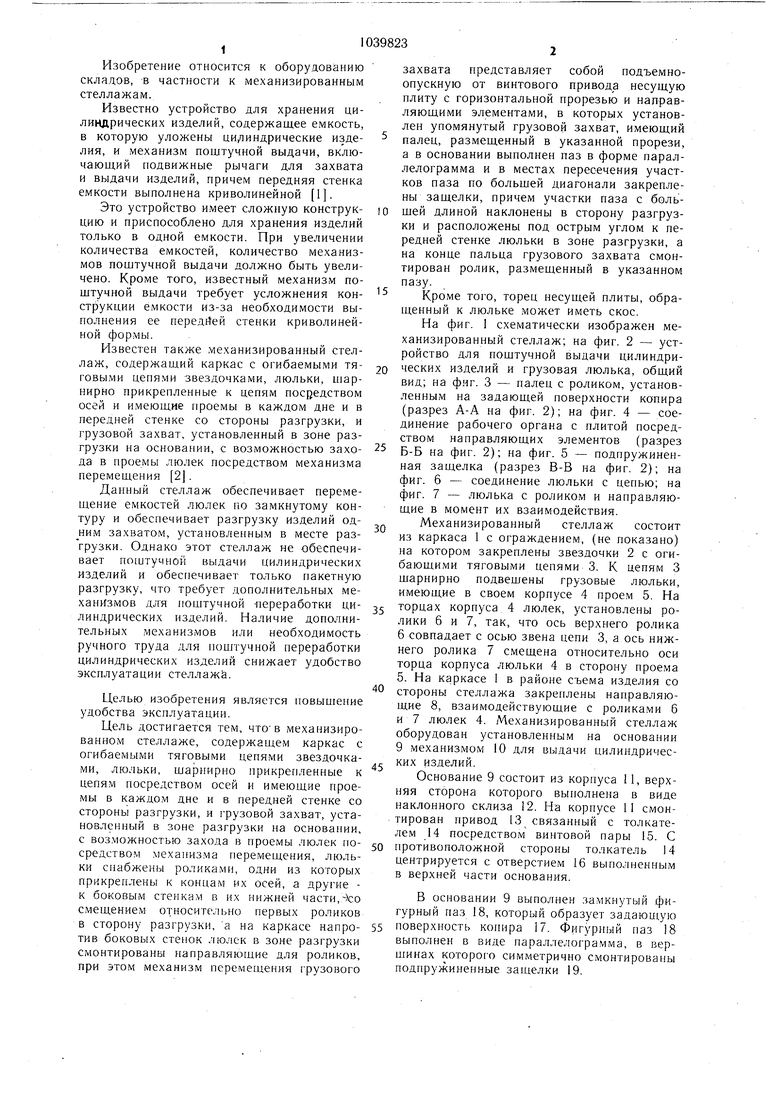
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи изделий с верхнего уровня на нижний | 1938 |
|
SU57308A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Устройство для поштучной выдачи цилиндрических изделий и спуска их с одного уровня на другой | 1983 |
|
SU1155549A1 |
| Устройство для поштучной выдачи круглых длинномерных изделий | 1990 |
|
SU1779448A1 |
| УКЛАДЧИК КИРПИЧА НА ЛЮЛЕЧНЫЙ КОНВЕЙЕР | 1971 |
|
SU320380A1 |
| Механизированный стеллаж для длинномерных цилиндрических изделий | 1981 |
|
SU1055717A1 |
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| Линия для подачи хлебобулочных изделий и их укладки на полки многоярусных контейнеров | 1989 |
|
SU1630746A1 |
| Туннельная многоярусная печь | 1976 |
|
SU657225A1 |
| Склад для хранения крупногабаритных грузов | 1981 |
|
SU1018884A1 |
1. МЕХАНИЗИРОВАННЫЙ СТЕЛЛАЖ, содержащий каркас с огибаемыми тяговыми цепями звездочками, люльки, шарнирно прикрепленные к цепям посредством осей и имеющие проемы в каждом дне и в передней стенке со стороны разгрузки, и грузовой захват, установленный в зоне разгрузки на основании с возможностью захода в npdeMbi люлек посредством механизма перемещения, отличающийся тем, что,с целью повыщения удобства эксплуатации люльки снабжены роликами, одни из которых прикреплены к концам их осей, а другие - к боковым стенкам в их нижней части со смещением относительно первых роликов в сторону разгрузки, а на каркасе напротив боковых стенОк люлек в зоне разгрузки смонтированы направляющие для роликов, при этом механизм перемещения грузового захвата представляет собой подъемно-опускную от винтового привода несущую плиту с горизонтальной прорезью и направляющими элементами, в которых установлен грузовой захват, имеющий палец, размещенный в указанной прорези., а в основании выполнен паз в форме параллелограмма и в местах пересечения участков паза по больщей диагонали закреплены защелки, причем участки паза с больщей длиной наклонены в сторону разгрузi ки и расположены под острым углрм к передней стенке люльки в зоне разгрузки, а (Л на конце пальца грузового захвата смонтирован ролик, размещенный в указанном пазу. 2. Стеллаж по п. 1, отличающийся тем, что торец несущий плиты, обращенный к люльке, имеет скос.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бункер с наклонным дном для длинномерных изделий | 1959 |
|
SU129990A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Элеватор-накопитель для тарных штучных грузов | 1973 |
|
SU695965A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
