(54) РОТОР ПЕРЕКЛАДКИ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор ориентации штучных деталей | 1979 |
|
SU812519A1 |
| Загрузочное устройство роторно-конвейерной машины для сборки втулочно-роликовой цепи | 1982 |
|
SU1058702A1 |
| Роторный автомат для термической обработки изделий | 1980 |
|
SU954444A1 |
| Роторный автомат питания | 1983 |
|
SU1114517A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Ротор съема штучных изделий | 1982 |
|
SU1052364A1 |
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Роторный автомат питания | 1987 |
|
SU1414555A2 |
| Ротор ориентации штучных деталей | 1980 |
|
SU906666A2 |
| Ротор ориентации втулок при сборке внутренних звеньев цепи | 1978 |
|
SU764823A1 |
1
Изобретение относится к устрой ствам для транспортирования заготовок и может быть применено для выдачи деталей типа колец в ориентированном положении.
Известен ротор, содержащий намагничиваемые захваты D3«
Недостатком данного ротора является невозможность сохранения ориен- тации изделия в процессе передачи его в другой ротор.
С целью обеспечения сохранения ориентации изделия в процессе пере- . кладки, каждый захват выполнен из двух оппозитно расположенньпс и выполненных из немагнитного материала сегментных частей цилиндра, стержня и двурогой вилки из немагнитных материалов, причем стержень жестко связан с упомянутыми сегментами и установлен с возможностью перемещения отно сительно вилки, а последняя расположена в плоскости, касательной к траектории перемещения захватов.
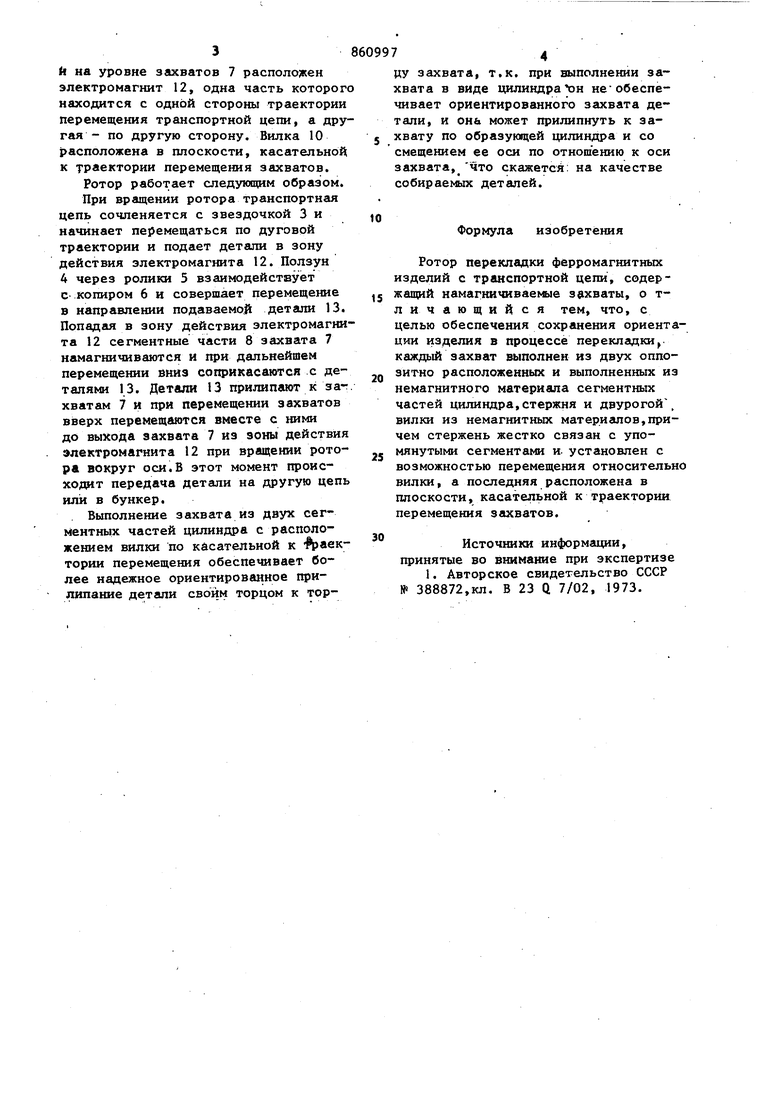
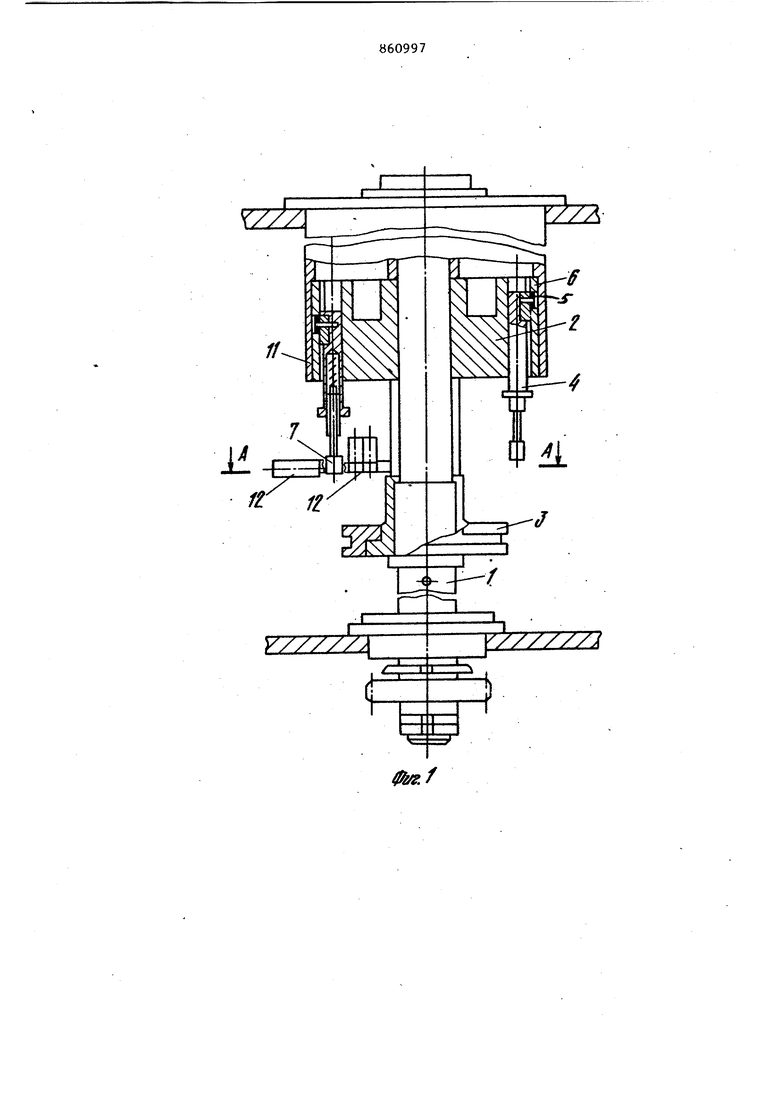
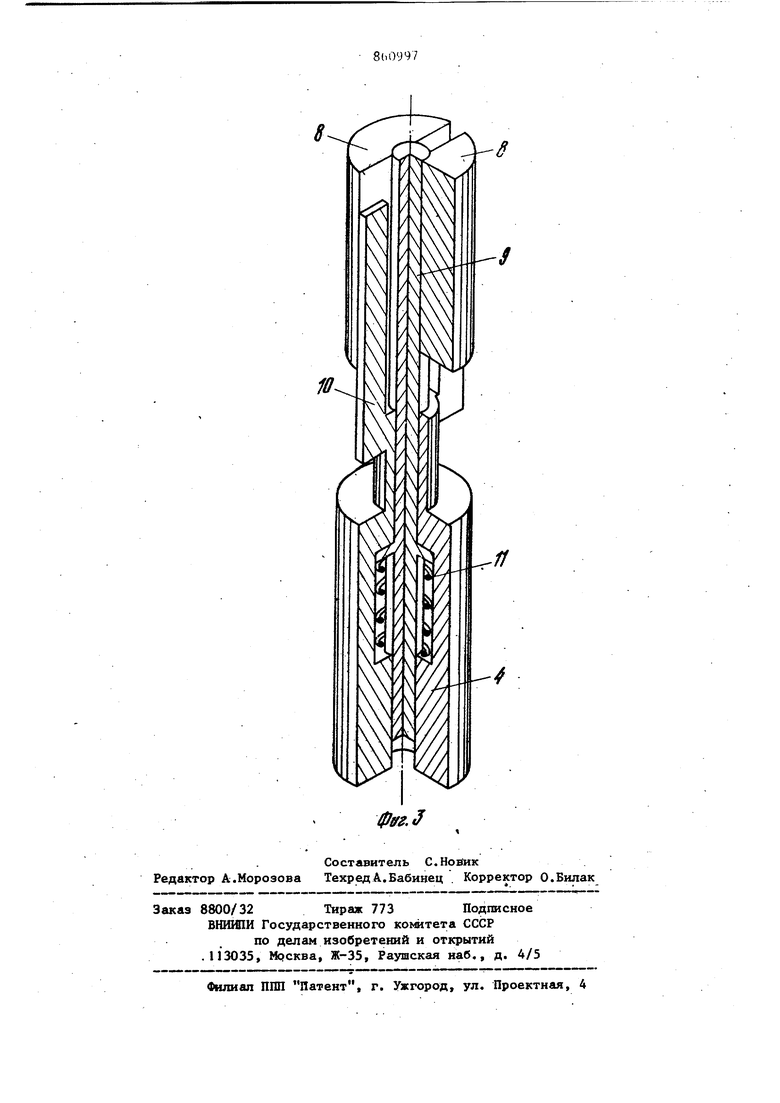
На фиг.I схематически изображен предложенный ротор перекладки; на фиг.2 - то же, вид в плане; на фиг.Ззахват.
Ротор перекладки содержит вал 1, на котором жестко закреплен барабан
2 и звездочка 3 для сочлечрчия с транспортной цепью (на фиг.не показано). В барабане 2 равномерно по окружности расположены ползуны 4 с
10 роликами 5, взаимодействующими с неподвижным копиром 6. Соосно с ползуном 4 расположен захват 7, выполненный в виде двух оппозитно расположенных сегментных частей, 8 цилиндра из
М немагнитного материала, стер;кня 9 из немагнитного материала, жестко соединенного с сегментныьм частями 8 ципиндра, и двурогой вилки 10 также из немагнитного материала, которая
20 жестко связана с ползуном 4. Стер-, жень 9 связан через пружину 11 с ползуном 4. Около ротора . перегрузки по дуге перемещения транспортной цепи 3 Й на уровне захватов 7 расположен электромагнит 12, одна часть которог находится с одной стороны траектории перемещения транспортной цепи, а дру гая - по другую сторону. Вилка 10 расположена в плоскости, касательной к траектории перемещения захватов. Ротор работает следующим образом. При вращении ротора транспортная цепь сочленяется с звездочкой 3 и начинает перемещаться по дуговой траектории и подает детали в зону действия электромагнита 12. Ползун 4 через ролики 5 взаимодействует с копиром 6 и совершает перемещение в направлении подаваемо. детали 13. Попадая в зону действия электромагни та 12 сегментные части 8 захвата 7 намагничиваются и при дальнейшем перемещении вниз соприкасаются с деталями 13. Детали 13 прилипают к заг хватам 7 и при перемещении захватов вверх перемещаются вместе с ними до выхода захвата 7 из эоны действия электромагнита 12 при вращении ротора вокруг оси.В этот момент происходат передача детали на другую цепь или в бункер. Выполнение захвата из двух сегментных частей цилиндра с расположением вилки по касательной к Р вектории перемещения обеспечивает более надежное ориентированное прилипание детали своим торцом к тор7цу захвата, т.к. при выполнении захвата в виде цилиндра4}н необеспечивает ориентированного захвата детали, и она может прилипнуть к захвату по образующей цилиндра и со смещением ее оси по отношению к оси захвата,что скажетсй: на качестве собираемых деталей. Формула изобретения Ротор перекладки ферромагнитньпс изделий с транспортной цепи, содержащий намагничиваекые захваты, о тличающийся тем, что, с целью обеспечения сохранения ориентации изделия в процессе перекладки каждый захват выполнен из двух оппозитно расположенных и выполненных из немагнитного материала сегментных частей цилиндра,стержня и двурогой вилки из немагнитных материалов,причем стержень жестко связан с упомянутыми сегментами и. установлен с возможностью перемещения относительно вилки, а последняя расположена в плоскости, касательной к траектории перемещения захватов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 388872,кл. В 23 Q 7/02, 1973.
f .
к/
фу.г
