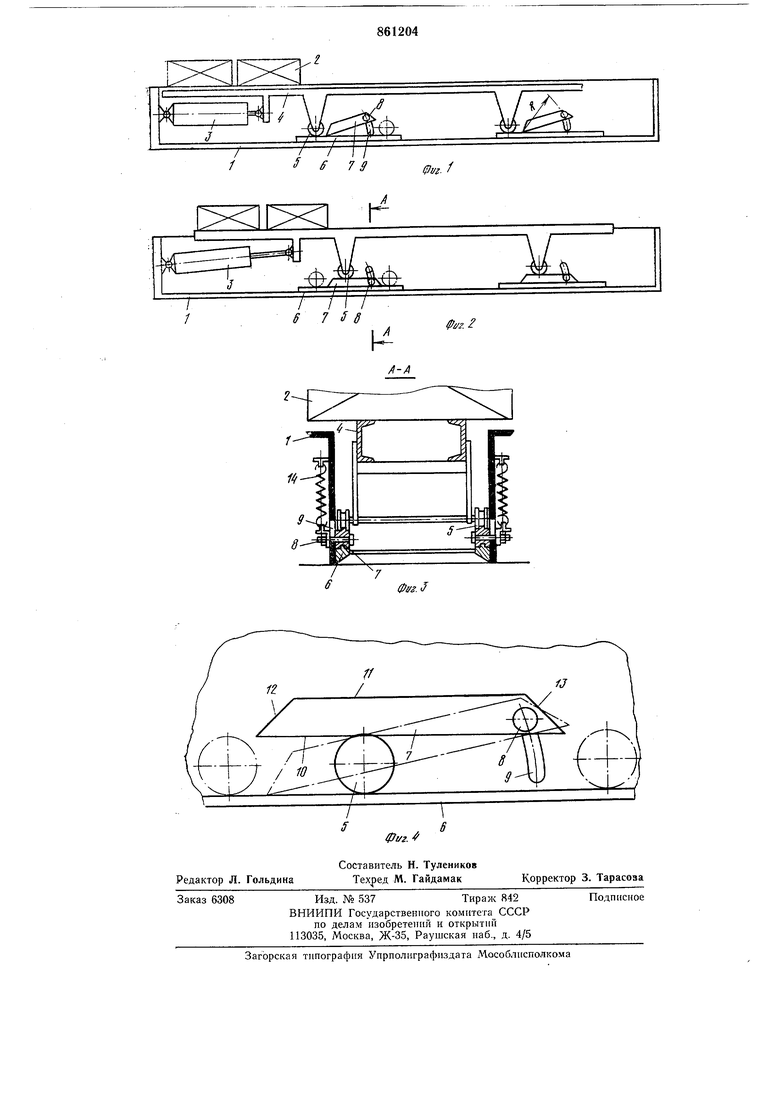
пус привода 3, выполненный из силового пилиндра, шарпирпо соединен с пеподвижиой рамой 1, а шток пилИНдра шарнирно. соединен с подвижной рамой 4, снабженной роликами 5, которые установлены на прямолинейных направляющих 6, закрепленных на неподвижной раме 1.
На неподвижной раме 1 также установлены копиры 7, пальпы 8 которых заключены в раднусных пазах 9. Рабочие поверхности копиров 7, состоящие из горизонтальных участкоВ 10 и 11 (фиг. 4) и наклонных уяастков 12 и 13, представляют собой трапеции. Каждый копир 7 от воздействия пружины 14 (фиг. 3) имеет возможность поворачиваться относительно передней кромки, так как паз 9 выполнеп по дхте окружности и имеет определенную длину. Каждый копир 7 установлен с воэможно стью поворота относительно пальца 8 (фиг. 4). Его поворачивающим звеном является ролик 5.
Конвейер работает следующим образом.
Лри рабочем ходе силового цилиндра 3 ролики 5 подвижной рамы 4 взаимодсйовуют с наклонны.мк участками 12 копиров 7 и приводят их в горизонтальное положение. Вследствие этого происходит подъем подвижной рамы 4 вместе с транспортируемыми изделиями 2 (фиг. 2).
При дальнейше.м выдвижении щтока подвижная рама 4 вместе с изделиями 2 передвигается по горизонтальному участку 11 копиров 7. В конце рабочего хода штока ролики 5 подвижной рамы 4 скатываются по наклонным участкам 13, и нодвпжная рама 4 перемещается относительно неподвижной .рамы 1 вниз, а изделия 2 укладываются на неподвижную ра.му 1.
Ролики 5 выходят из зацепления с кониpaiMH 7, которые от воздействия пружин 19 занимают исходное положение.
При обратном ходе приводного механизма 3 ролики 5 подвижной рамы 4 взаимодействуют с горизонтальными участками 10 копиров 7, которые поворачиваются относительно оси пальца 8.
Как только ролики 5 подвижной рамы 4 займут первоначальное положение и взаиМодействие роликов 5 с горизоитальными участками 10 копиров 7 прекратится, копиры от воздействия собственного веса займут исходное положение. Дальше никл повторяется.
Меняя угол наклона участка 13 конира 7, можно подобрать скорость опускания изделий 2, исходя из требований к транспортированию изделий.
Такое выполнение конструкции конвейера позволяет обеспечить плавное опускание транспортируемых изделий. Также в предлагавмом копвейере отсутствуют движущееся тележки.
Формула И 3 о б р е т е н и я
Шаговый конвейер, содержащий неподвижную раму с копирами, подвижную раму с роликами, соединенную с приводом и установленную в направляющих неподвижной
рамы с ВОЗМОЖНОСТЬЮ горизонтального и вертикального перемещения, отличающийся тем, что, с целью снижения динамических нагрузок на церемещаемые изделия, каждый копир сиабжен подпружиненным относительно неподвижной рамы пальце.м и выполнен в виде трапеции с расположенным наверху меньшим основанием, а в неподвижной раме вынол1 ен по дуге окружности паз, в котором расположен палец копира, при этом копир установлен с возможностью поворота относительно своей нижней кромки, расноложенной с противоположной стороны от пальца копира.
Источники информации, принятые во впи.мание при экспертизе
1.Авторское свидетельство СССР 45 № 382562, кл. В 65 G 25/04, 1971.
2.Авторское свидетельство СССР № 515699, кл. В 65 G 25/04, 1976 (прототип).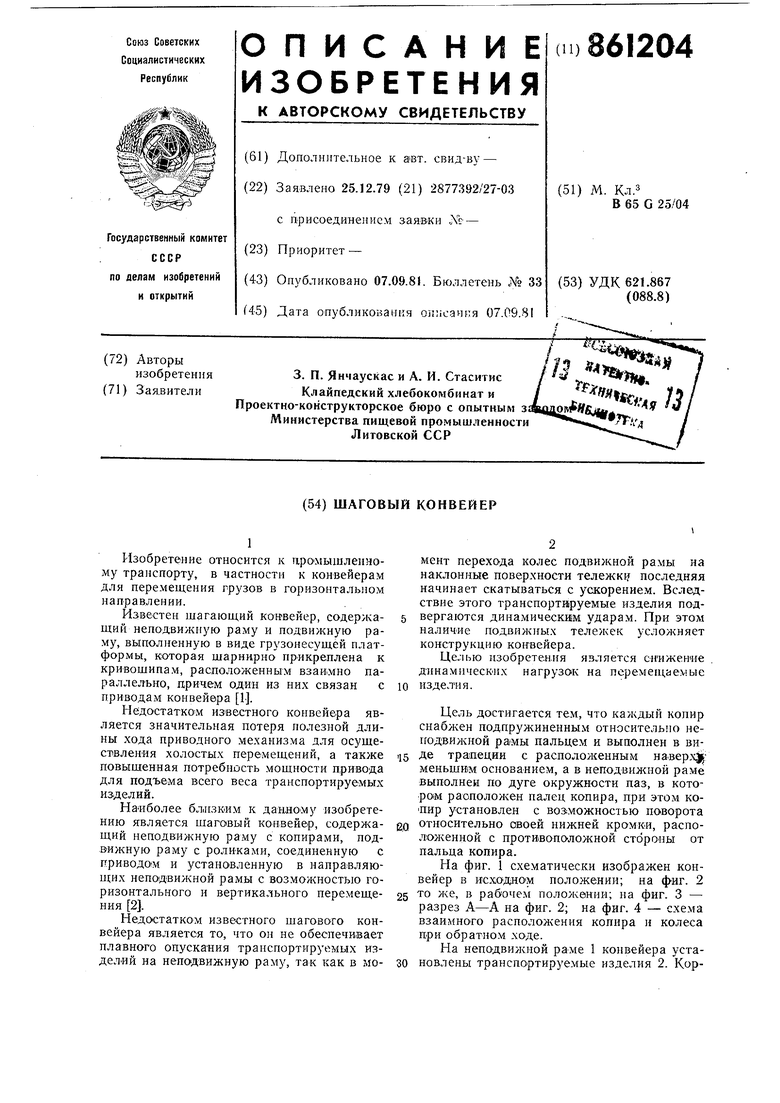
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU882863A1 |
| Шаговый конвейер для перемещения заготовок через цилиндрический индуктор | 1988 |
|
SU1597398A1 |
| Шаговый конвейер | 1973 |
|
SU515699A1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Шаговый конвейер | 1985 |
|
SU1240695A2 |
| Шаговый конвейер | 1984 |
|
SU1181958A1 |
| Шаговый конвейер | 1988 |
|
SU1565790A1 |
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1979 |
|
SU867799A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |