Фиг.
Изобретение относится к конвейерам с циклически движущимися грузоносителями и может быть использовано для механизации перемещения штучных грузов как в виде самостоятельного механизма, так и в состательной тяги 14, а каждый из них шар- нирно соединен с неподвижной рамой 1 посредством тяги 15 и 16, и упорного рычага 17, размещенного на оси 18.
Подвижная рама 2 установлена с возможве технологического оборудования горизон- 5 ностью поочередного взаимодействия ку- тально или наклонно под углом, не превы- лачками 6 с упорными рычагами 17 в конце рабочего и холостого ходов.
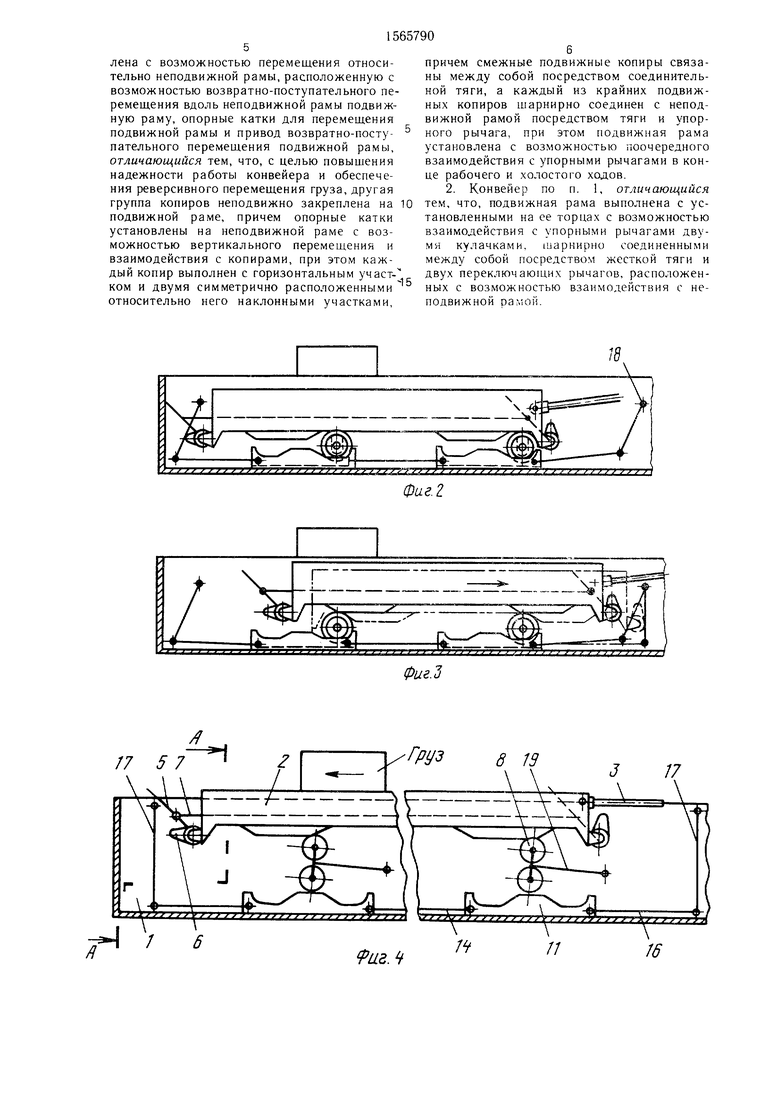
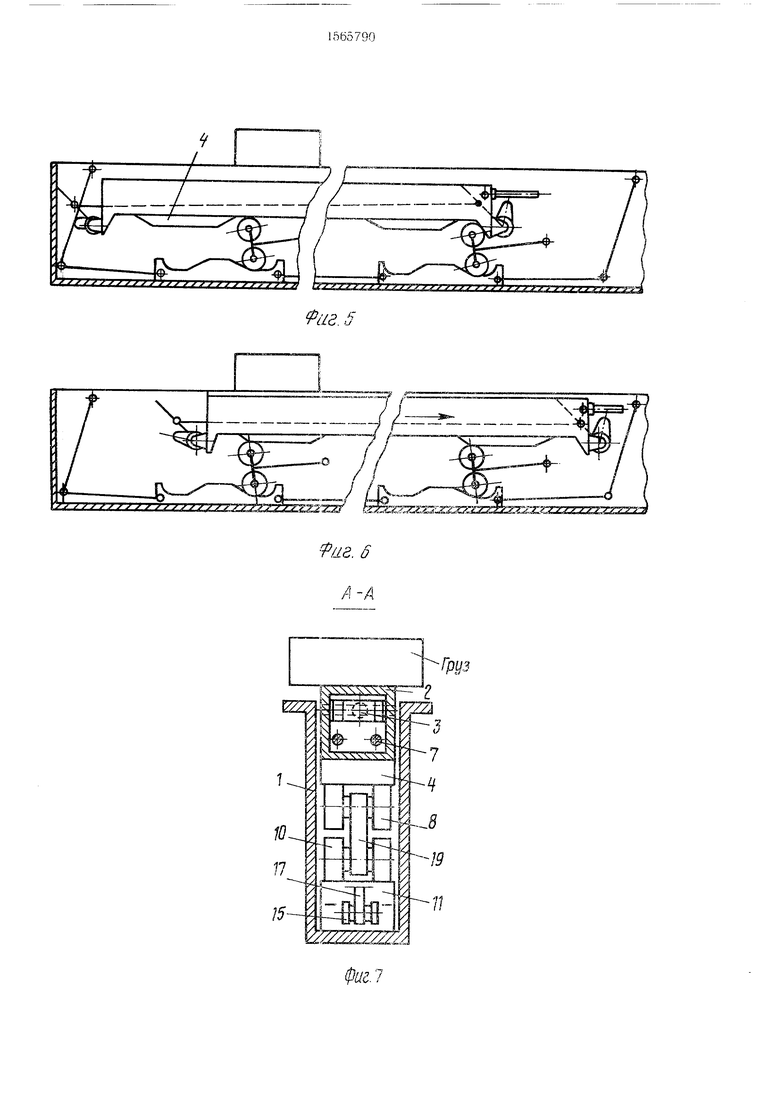
Согласно вариантам исполнения шагового конвейера (фиг. 4-6) катки 8 и 10
На фиг. 1 изображен шаговый конвейер в разрезе в момент, предшествующий опусканию подвижной рамы при скатывании копира с катка и прекращению транспортирования груза; на фиг. 2 - то же, в момент прихода подвижной рамы в крайнее левое положение, при этом копиры неподвижной рамы переведены влево, а подвижная рама подготовлена к холостому хо15
шающим угла трения транспортируемого изделия о раму конвейера.
Цель изобретения - повышение надежности работы конвейера и обеспечение ре- ю имеют раздельные оси вращения и закреп- версивного перемещения груза.лены на траверсе 19, качающейся на оси
относительно неподвижной рамы 1. Такое закрепление катков облегчает их вертикальное перемещение, но увеличивает вертикальный габарит шагового конвейера.
Конвейер работает следующим образом. Из положения, показанного на фиг. 1, подвижная рама 2 перемещается влево, опускаясь по наклонной поверхности копиров 4, укладывает транспортируемый груз на неподду; на фиг. 3 - то же, когда подвиж- 20 вижную раму 1 и затем кулачком 6 пере- ная рама заканчивает холостой ход и на- двигает рычаг 17 влево. Последний через ходится в положении, предшествующем пере- тяги 14-16 смещает влево копиры 11 неводу копиров неподвижной рамы вправо и подвижной рамы и поворачивает правый подъему подвижной рамы вверх; на фиг. 4- рычаг 17. При этом катки 10 скатывают- 6 - варианты исполнения катков на качаю- ся по наклонному участку копиров 11, опус- щейся траверсе; на фиг. 7 - разрез А-А 25 кая подвижную раму 2 еще ниже, па фиг. 4; на фиг. 8 - разрез Б-Б наПри обратном ходе привод 3, перемефиг. 1; на фиг. 9 - конвейер при изме- щая подвижную раму 2 вправо, вкатывает ненном направлении транспортирования, об- ее по наклонным поверхностям кулачков 4 щий вид.на катки 8, не поднимая ее при этом над
Шаговый конвейер содержит расположен- ™ поверхностью неподвижной рамы 1, и пере- ----- -- ---катывает по горизонтальным участкам колиров 4 вправо (фиг. 3, 6).
В конце хода вправо подвижная рама 2 скатывается по наклонным участкам копиров 4, затем правым кулачком 6 пере4, неподвижно закрепленных на подвижной 35 Двигает правый рычаг 17 вправо, передви- раме 2, каждый из которых имеет гори- гая через тяги 16 и 15 копиры 11 вправо, зонтальный участок и два симметрично расположенных относительно него наклонных участка. Подвижная рама 2 выполнена с установленными на ее торцах и шарнирно
соединенными между собой посредством двух 40 При этом подвижная рама, поднятая копи- переключающих рычагов 5 двумя кулачка- рами 11, не выступает над поверхностью ми 6 и тяги 7. Переключающие рычаги 5 расположены с возможностью взаимодействия с неподвижной рамой 1. На неподвижной раме 1 установлены с возможное- 4С. над неподвижной рамой 1 и перемещая его тью вертикального перемещения опорные катную с возможностью возвратно-поступательного перемещения вдоль неподвижной рамы 1 подвижную раму 2, привод 3 возвратно-поступательного перемещения подвижной рамы 2, по меньшей мере, пару копиров
а через тягу 14 поворачивая левый рычаг 17 вправо, возвращая их в положение, показанное на фиг. 1 и 3 и подготавливая шаговый конвейер к рабочему ходу.
неподвижной рамы 1. При ходе влево привод 3 вкатывает подвижную раму 2 на копиры 4, поднимая транспортируемый груз
ки 8, размещенные на общей оси 9 с катками 10. На неподвижной раме 1 с возможностью перемещения относительно нее установлена по меньшей мере пара копиров 11.
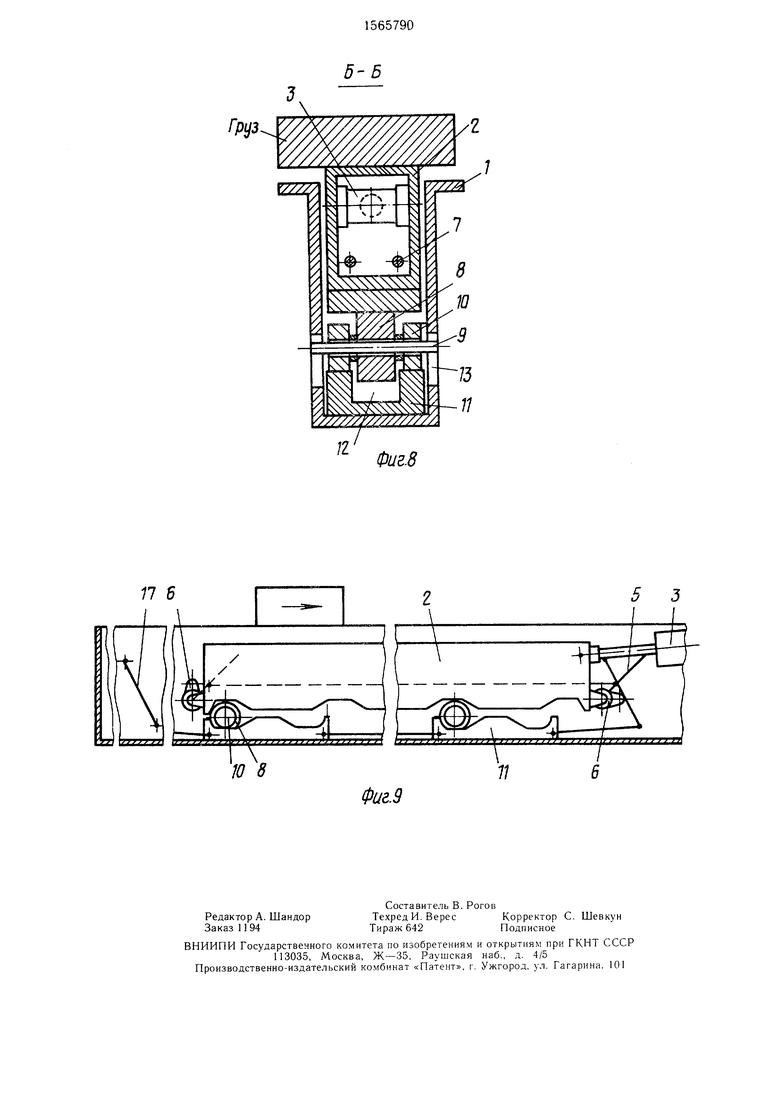
Диаметр катков 8 может быть больше диаметра катков 10 по конструктивным соображениям, тогда в теле копиров 11 должны быть сделаны пазы 12 для прохода катков 8. Оси 9 катков 8 и 10 установлены в пазах 13 неподвижной рамы 1. Кат- 55 ки 8 и 10 взаимодействуют с копирами 4 и 11. Смежные подвижные копиры 11 связаны между собой посредством соединивлево.
В дальнейшем цикл повторяется.
Для изменения направления перемещения груза рычаги 5 поворачивают на 90° (фиг. 9). При этом кулачки 6 также пово- 50 рачиваются на 90°, вершина левого кулачка 6 отходит от левого рычага 17, а вершина правого кулачка 6 приближается к правому рычагу 17 на величину, достаточную для смещения копиров 11 на половину их рабочей длины вправо.
Формула изобретения 1. Шаговый конвейер, содержащий две группы копиров, одна из которых установтельной тяги 14, а каждый из них шар- нирно соединен с неподвижной рамой 1 посредством тяги 15 и 16, и упорного рычага 17, размещенного на оси 18.
Подвижная рама 2 установлена с возможвого конвейера (фиг. 4-6) катки 8 и 10
имеют раздельные оси вращения и закреп- лены на траверсе 19, качающейся на оси
Двигает правый рычаг 17 вправо, передви- гая через тяги 16 и 15 копиры 11 вправо,
При этом подвижная рама, поднятая копи- рами 11, не выступает над поверхностью над неподвижной рамой 1 и перемещая его
а через тягу 14 поворачивая левый рычаг 17 вправо, возвращая их в положение, показанное на фиг. 1 и 3 и подготавливая шаговый конвейер к рабочему ходу.
При этом подвижная рама, поднятая копи- рами 11, не выступает над поверхностью над неподвижной рамой 1 и перемещая его
неподвижной рамы 1. При ходе влево привод 3 вкатывает подвижную раму 2 на копиры 4, поднимая транспортируемый груз
При этом подвижная рама, поднятая копи- рами 11, не выступает над поверхностью над неподвижной рамой 1 и перемещая его
влево.
В дальнейшем цикл повторяется.
Для изменения направления перемещения груза рычаги 5 поворачивают на 90° (фиг. 9). При этом кулачки 6 также пово- рачиваются на 90°, вершина левого кулачка 6 отходит от левого рычага 17, а вершина правого кулачка 6 приближается к правому рычагу 17 на величину, достаточную для смещения копиров 11 на половину их рабочей длины вправо.
Формула изобретения 1. Шаговый конвейер, содержащий две группы копиров, одна из которых установлена с возможностью перемещения относительно неподвижной рамы, расположенную с возможностью возвратно-поступательного перемещения вдоль неподвижной рамы подвижную раму, опорные катки для перемещения подвижной рамы и привод возвратно-посту- нательного перемещения подвижной рамы, отличающийся тем, что, с целью повышения надежности работы конвейера и обеспечения реверсивного перемещения груза, другая группа копиров неподвижно закреплена на подвижной раме, причем опорные катки установлены на неподвижной раме с возможностью вертикального перемещения и взаимодействия с копирами, при этом каждый копир выполнен с горизонтальным участком и двумя симметрично расположенными относительно него наклонными участками,
причем смежные подвижные копиры связаны между собой посредством соединительной тяги, а каждый из крайних подвижных копиров шарнирно соединен с неподвижной рамой посредством тяги и упорного рычага, при этом подвижная рама установлена с возможностью поочередного взаимодействия с упорными рычагами в конце рабочего и холостого ходов.
2. Конвейер по п. 1, отличающийся тем, что, подвижная рама выполнена с установленными на ее торцах с возможностью взаимодействия с упорными рычагами двумя кулачками, шарнирно соединенными между собой посредством жесткой тяги и двух переключающих рычагов, расположенных с возможностью взаимодействия с неподвижной рамой.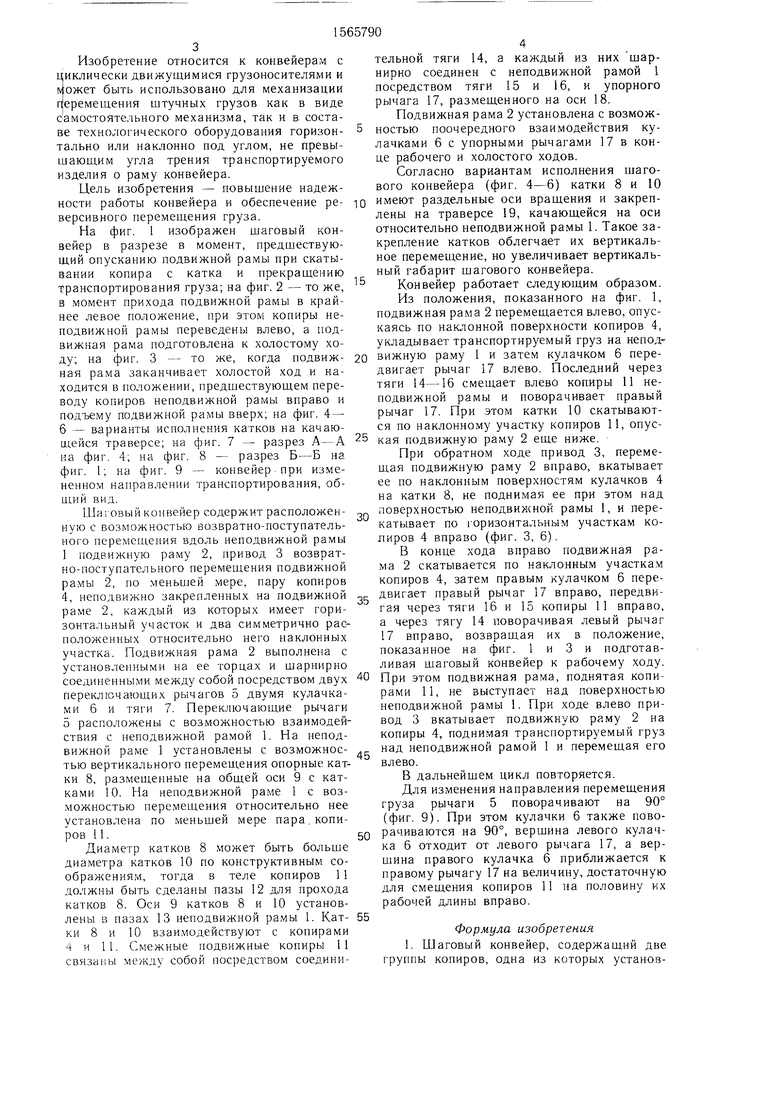
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Шаговый конвейер | 1986 |
|
SU1411241A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| Шаговый конвейер | 1981 |
|
SU967905A1 |
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1980 |
|
SU939350A1 |
| Шаговый конвейер | 1983 |
|
SU1159844A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Шаговый конвейер бнч-3 | 1979 |
|
SU893743A1 |
Изобретение относится к шаговым конвейерам. Цель изобретения - повышение надежности работы и обеспечение реверсивного перемещения груза. С возможностью перемещения вдоль неподвижной рамы /Р/ 1 установлена подвижная Р 2, группа копиров /К/ 11. На Р 1 размещены опорные катки 8 для Р 2, привод 3 перемещения Р 2. На Р 2 неподвижно закреплена группа К 4, каждая из которых шарнирно соединена с Р 1 посредством тяги /Т/ 15 и упорного рычага 17, и между собой посредством Т 14. Каждый К 4 и 11 выполнен с горизонтальным участком и двумя симметрично расположенными относительно него наклонными участками. На Р 2 на торцах с возможностью взаимодействия с рычагами 17 установлены кулачки 6, соединенные между собой посредством Т 7 и двух переключающих рычагов 5, взаимодействующих с Р 1. Установлена Р 2 в крайнем правом положении и перемещается влево, опускаясь по К 4, и передвигает рычаг 17 влево. Катки 10 скатываются по К 11, опуская Р 2. При обратном ходе Р 2 движется вправо, вкатываясь по К 4, и кулачком 6 продвигает рычаг 17 и К 11 вправо. При ходе влево Р 2, вкатывается на К 4, поднимая груз над Р 1 и перемещая его. 1 з.п. ф-лы, 9 ил.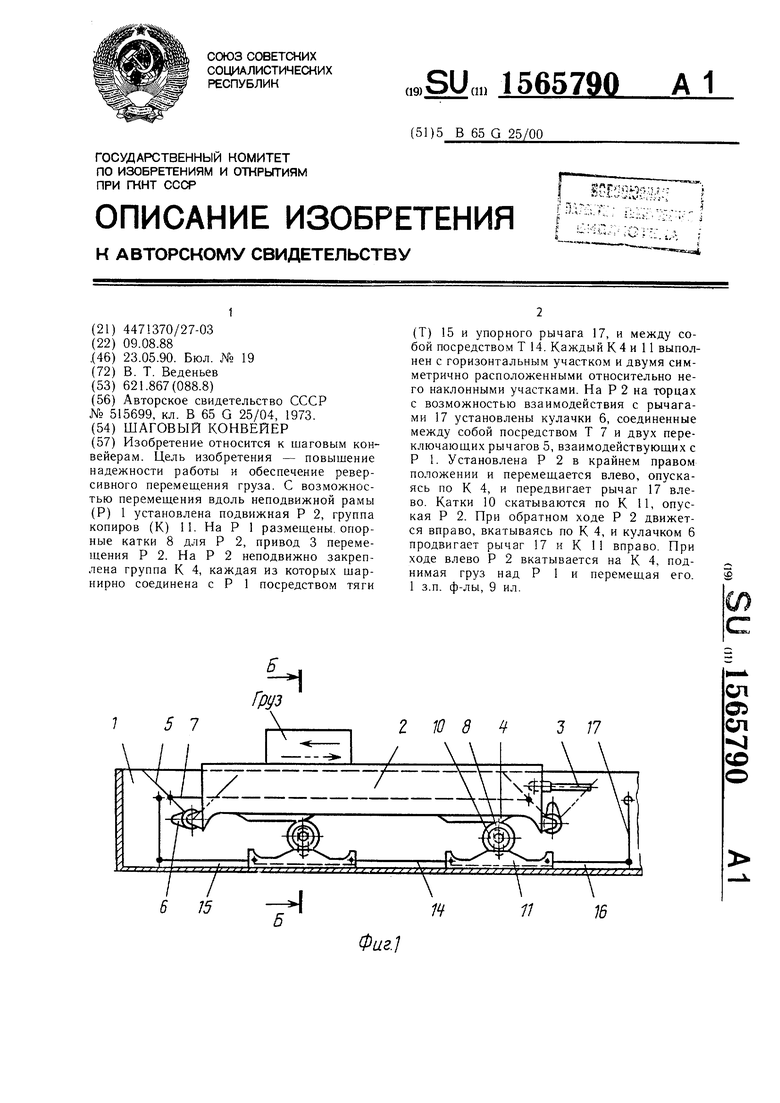
„1 izl tzrjzzzin
г у
1/Груз
8 13 .
Фиг.Ч
v-v
ff 377Ј
S Web
06Z99et
17 6
Ю 8
Фиг.8
| Шаговый конвейер | 1973 |
|
SU515699A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
