Изобретение относится к подъемно-транспортному оборудованию, в частности к конвейерам с возвратно-поступательным движением грузоносителей, разъединяемых с грузом при обратном ходе, и является усовершенствованием изобретения по авт. св. № 1159844.
Целью изобретения является расширение технологических возможностей шагового конвейера.
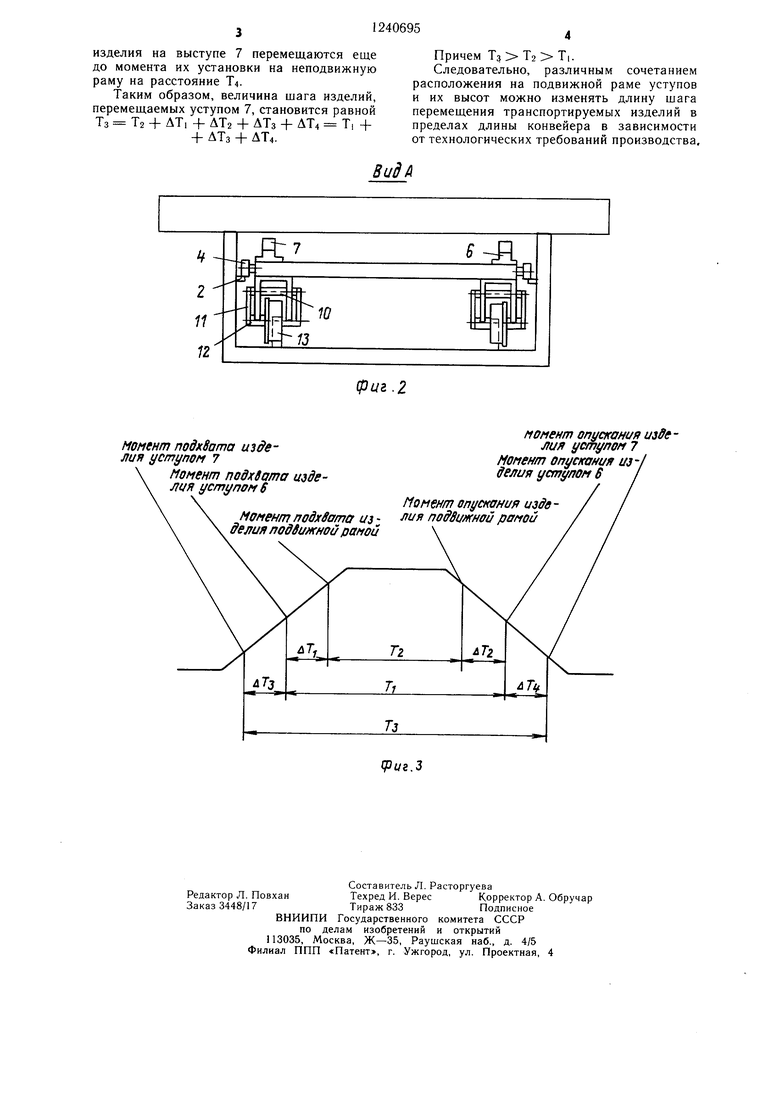
На фиг. 1 изображен шаговый конвейер, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - траектория движения подвижной рамы.
Шаговый конвейер содержит неподвижную раму 1 с горизонтальными направ- ляюшими 2, на которых установлена подвижная рама 3 с опорными роликами 4, связанная с тягой 5 с приводом горизонтального перемеш,ения (не показан). На подвижной раме 3 по ее длине жестко закреплены уступы б и 7, отличаюш.ие- ся друг от друга своей высотой (уступ 7 выше уступа 6), и кронштейны 8, выполненные с выступом 9 и выемкой а.
Кроме того, в каждом кронштейне 8 выполнен паз S, в котором свободно установлен палец 10, связанный посредством планки 11 с осью 12 грузового ролика 13. Грузовые ролики 13 взаимодействуют с копирами 14, закрепленными на неподвижной раме 1.
Шаговый конвейер работает следуюш,им образом.
В исходном положении (фиг. 1) подвижная рама 3 находится в крайнем левом положении и лежит опорными роликами 4 на горизонтальных направляюш,их 2. Грузовые ролики 13 при этом под действием собственного веса опущены в крайнее нижнее положение, их оси 12 находятся под выемками а, но не ниже односторонних выступов 9.
С помощью грузоподъемного устройства на загрузочный участок конвейера загружается одно изделие. Рабочий ход подвижной рамы 3 начинается с ее перемещения тягой 5 вправо на опорных роликах 4 по горизонтальным направляющим 2, грузовые ролики 13, перемещаясь вместе с подвижной рамой 3, достигают копиров 14, касаются их и начинают подниматься вверх за счет того, что оси 12 при этом, скользя по односторонним выступам 9, фиксируются в выемках а, а пальцы 10 свободно перемещаются вверх по пазам в. Нри дальнейшем взаимодействии копиров 14 с грузовыми роликами 13 подвижная рама 3 поднимается, низкий уступ 6 подхватывает изделие, перемещает его на шаг Ti, опускает на накопительный участок конвейера. Опускаясь, подвижная рама 3 встает опорны
ми роликами 4 на горизонтальные направляющие 2, занимая крайнее правое положение, грузовые ролики 13 выходят из взаимодействия с копирами 14 и под действием собственного веса возвращаются в исходное положение, оси 12 при этом выводятся из выемок а.
При обратном холостом ходе подвижная рама 3 перемещается на опорных роликах 4 по направляющим 2 влево, при этом 0 копиры 14, взаимодействуя с грузовыми роликами 13, отклоняют их вправо, не вводят оси 12 в выемки а. Подвижная рама 3, не поднимаясь над неподвижной рамой 1, занимает исходное положение, грузовые ролики 13 выходят из взаимодей- ствия с копирами 14 и под действием собственного веса возвращаются в исходное положение.
Шаговый конвейер снова делает рабочий 0 ход после загрузки изделием его загрузочного участка.
При этом и всех последующих рабочих ходах при подъеме подвижной рамы 3 уступ 6 подхватывает изделие с загрузочного участка конвейера и перемещает его на расстояние ATi, после чего подвижная рама 3 подхватывает второе изделие на накопительном участке, а изделия перемещаются на расстояние Т2. При этом второе изQ делие ставится на неподвижную раму 1, а первое продолжает движение, и до момента его установки на неподвижную раму 1 перемещается еще на расстояние АТ2.
Таким образом, величина шага Т-. ДТ, + Т2 -f ДТ2.
Причем величина шага Т2 равна или чуть больше габарита изделия.
Затем шаговый конвейер занимает исходное положение и т.д. до заполнения изделиями накопительного участка конвейера. После этого при очередном рабочем хо0 де конвейера в работу включается уступ 7, длина которого позволяет разместить на нем одновременно два перемещаемых изделия. При подъеме подвижной рамы 3 уступ 7 подхватывает два изделия с конца нако- пительного участка и перемещает их на рас- стояние АТз.
После этого уступ 6 подхватывает изделие с загрузочного участка и перемещает его на расстояние ДТ|, на такое же расстояние ДТ дополнительно перемещаются и два изQ делия с помощью уступа 7 до момента подхвата подвижной рамой 3 изделий с накопительного участка. После этого все изделия, в том числе и перемещаемые уступом 7, перемещаются на расстояние Т2 до момента опускания изделий на участ5 ке накопления. Подвижная рама 3 перемещается с изделиями далее на расстояние ДТ2 до момента опускания первого изделия на вторую позицию, после чего два
изделия на выступе 7 перемещаются еще до момента их установки на неподвижную раму на расстояние Т4.
Таким образом, величина шага изделий, перемещаемых уступом 7, становится равной Тз Т2 + AT, + АТг + АТз + АТ4 Т, + + АТз + АТ4.
Причем Тз Т2 Т|.
Следовательно, различным сочетанием расположения на подвижной раме уступов и их высот можно изменять длину шага перемещения транспортируемых изделий в пределах длины конвейера в зависимости от технологических требований производства.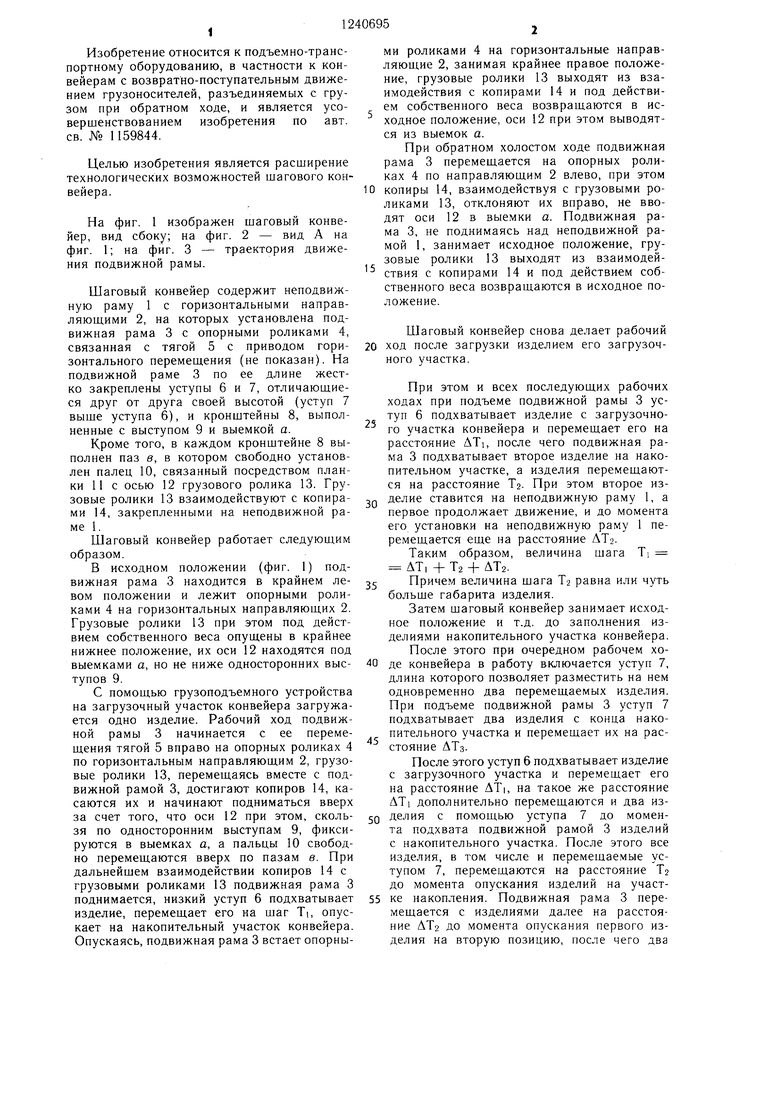
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шаговый конвейер | 1988 |
|
SU1525089A1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Агрегат для термообработки изделий | 1981 |
|
SU1006511A1 |
| Шаговый конвейер | 1974 |
|
SU564230A1 |
| Шаговый конвейер для перемещения заготовок через цилиндрический индуктор | 1988 |
|
SU1597398A1 |
| Шагающий конвейер | 1985 |
|
SU1240696A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| Шаговый конвейер | 1980 |
|
SU939350A1 |

/J
фиг .2
момент подкВата изделия уступом 7
Момент подхвата изделий уступом S
Момент подхвата из - делия подвижной рамой
нонент опускания изделия ycnrjynofi 7
Момент Опускания из-1 делия уступом 6
Тг
Тз
иг.З
| Шаговый конвейер | 1983 |
|
SU1159844A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
