(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Полуавтомат герметизации полупроводниковых приборов контактной сваркой | 1988 |
|
SU1590290A2 |
| Установка для контроля герметичности полых изделий | 1986 |
|
SU1401308A1 |
| Устройство для укладки изделий в пакет | 1985 |
|
SU1255532A1 |
| УСТРОЙСТВО ШАГОВОЙ ТРАНСПОРТИРОВКИ | 1993 |
|
RU2071443C1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
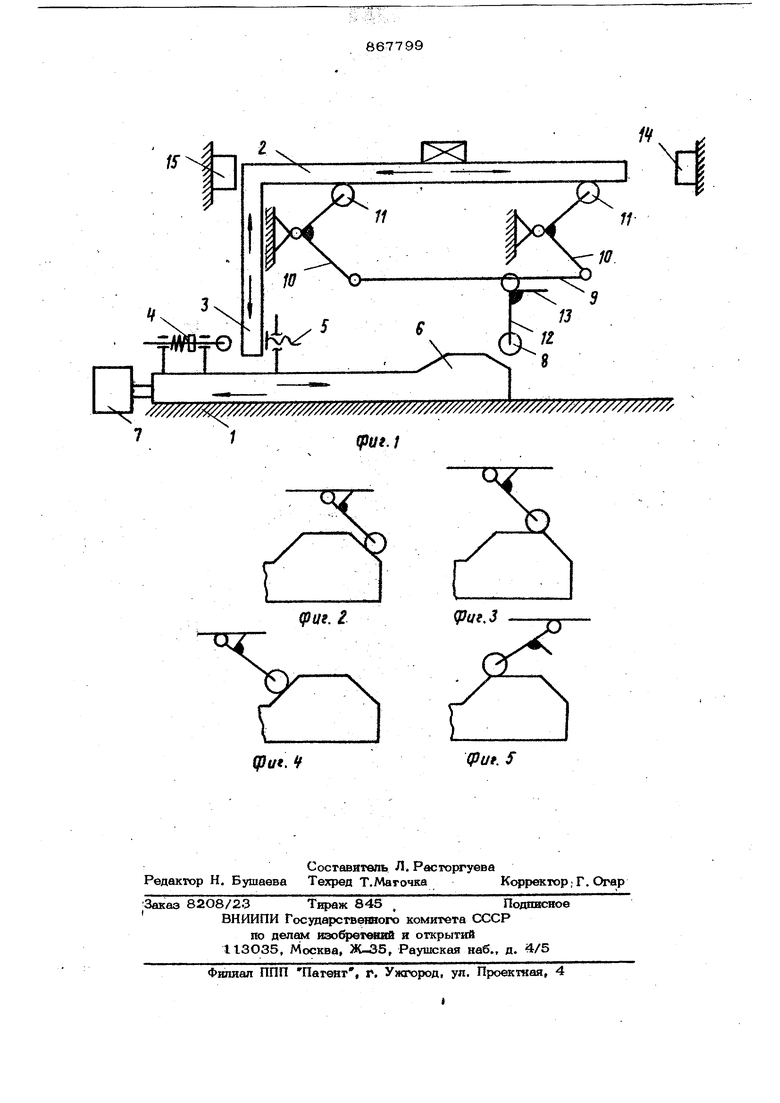
Изобретение относится к подъемно транспортному оборудованию, в частнЬ-s стй к шаговым конвейерам, и может быть применено в машиностроении и приборсю1ро ешш в качестве межопера1шонной. тракспортной связи. Известен шаговь1й конвейер, неподвижную раму с копирами и подвижную раму, соединенную с приводным меха низмом, подпружиненную тележку на колесах З Недостатком указанного шагового конвейера является то, 4rito тюпъем и опускание подвижной рамы Т1роиг5йодктся одсювр мемно с ее горизонтальным неромешенйем вследствие чего пoдЬQv t и опускание производится не вертикально. Это не дает возможности использовать конвейер в автоматических линиях, гдеутребуется точно устанавливагБ на пальцы при а&то матической сборке, обработке без дополнительного механизма фиксашш детали. Наиболее близок к предлагаемому шаговый конвейер, содержащий неподвижную раму, подвижную раму, уствйовленную на опорных роликах и расположенную между ргоаничителями хода, механизм подъезда подвижной рамы с копиром в привод; возвратно-поступательного п емещения под вижной рамы 2. Недостаток этого - сложность KoiaetfiyRшш, т.е. сложность механизма подъема подвижной рамы, включаюшегося в себябольшое количество элементов, в том числе плунж, который фиксирует в нижнем Положении подвижную раму, н взаимодействуквдие собачки, обеспечивакяЦие поднятое положижие подвижной рамы тфи ходе конвейера вперед с деталью. Цепь изобретения - упромение конструкции конвейера, Указанная цель достигается тем, что механизм иодъема подвижной рамы выполнен в виде закрепленных на копире жесткого регулируемого и подпружиненногчэ упоров, расположенного между ними и закрепленного на подвижной раме кронштейна и кинематически связанного с опорными ропиками рычага с ограничители поворота в одау сторону и с роликом, установленны с возможностью взаимодействия с копиром На фиг. I схематически изображен кон вейер, общий вид; на фиг. 2-5 - положени ролика при различных положениях копира. Шаговый конвейер состоит из неподвиж ной рамы I, подвижной рамы 2, кронштей 3 кЬторый расположен между пЬдпружяненным 4 и жестким регулируемым 5 упорами, установленными на копире 6, сое диненным с приводным механизмом - си-ловым цилиндром 7. Копир 6 взаимодействует с роликом 8, связанньпу с подвиж ной рамой 2, тягой 9 через рычаги 10 и опорные ролики 11. Ролик8 соединен с тягой 9 рычагом 12, имекйдим упор 13. Для ограничения горизонталь,ного перемещения подвижной рамы 2 предусмотрены ограничители хода 14 и 15. Конвейер работает следующим образом Исходное положение элементов конвейера изображено на фиг. I. При транспорги ровке изделий силовой цилиндр 7 перемещает копир 6 с закрепленными на нем упорами 4 и 5, при этом копир б входит в контакт с роликом 8 и отклоняет его до жесткого упора с тягой 9 (см. фиг. 2 после чего при дальнейшем перемещении копира 6 происходит перемещение ролика В вместе с тягой 9, которая, в свою очередь, поворачивает рычаги Юс роликами II. Подвижная рама совершает вертикальное перемещение, поднимаясь на неподвижной рамой. Ролик 8, достигнув поверхности копира 6, параллельной направлению его перемещения (фиг. 3), ост навливается, а подпружиненный упор 4, войдя в контакт с кронштейном 3 подвижной рамы 2, перемещает ее по роликам И до ограничителя 14 хода, перенося изделие на следующую позицию, после чего пружш1а упора 4 сжимается, а ролик Б опускается по наклонной поверхности копира 6 (фиг. 4), подвижная рама 2 при этом опускается. Вьшолннв рабочий ход, силовой пшгаддр автоматически переключается на возврат в исходное положение, при этом ролик 8 копиром 6 поворачивается так, что копир проходит под ним (фиг. 5), пружина упора 4 разжимается, после чего упор 4 отхо-гит от кронштейна 3 подвижной рамы 2, В конце ход1а: силового цшшвдра 7 подвижная рама 2 перемешается в исходное положение упором 5, и далее цикл повторяется. Такое выполнение конвейера дает возможность устанавливать транспортируемые детали на пальцы (при автоматической сборке, обработке). .Формула изобретения . и агювый конвейер, содержащий неподвижную раму, подвижную раму, установпонцую на опорных роликах и расположенную между ограничителями хода, механизм подъема подвижной рамы с копиром и привод возвратно-поступательного перемещения подвижной рамы, о тличающ и и с я тем, что, с целью упрощения конструкции, механизм подъема подвижной рамы вьтолнен в виде закрепленных на копире жесткого регулируемого и подпружиненного упоров, расположенного между ними и закрепленного на подвижной раме кронштейне, и кин« 1атически связанного с опорными роликами рычага с ограничителем поворота в одну сторону и с роликом, установленным с возможностью взаимодействия с кописюм. Источники и 1юрмашш, пршштые во внимание при экспертизе I. Авторское свидетельство СССР № 515699, кл. В 65 О 25/О4, 1976. 2. Авторское свидетельство СССР № 649632, кл. В 65 6 25/О4, 1976 (прототип) . ////////// //////////// ut. /
9г(/г. г
pui.3
. f
(put. S
