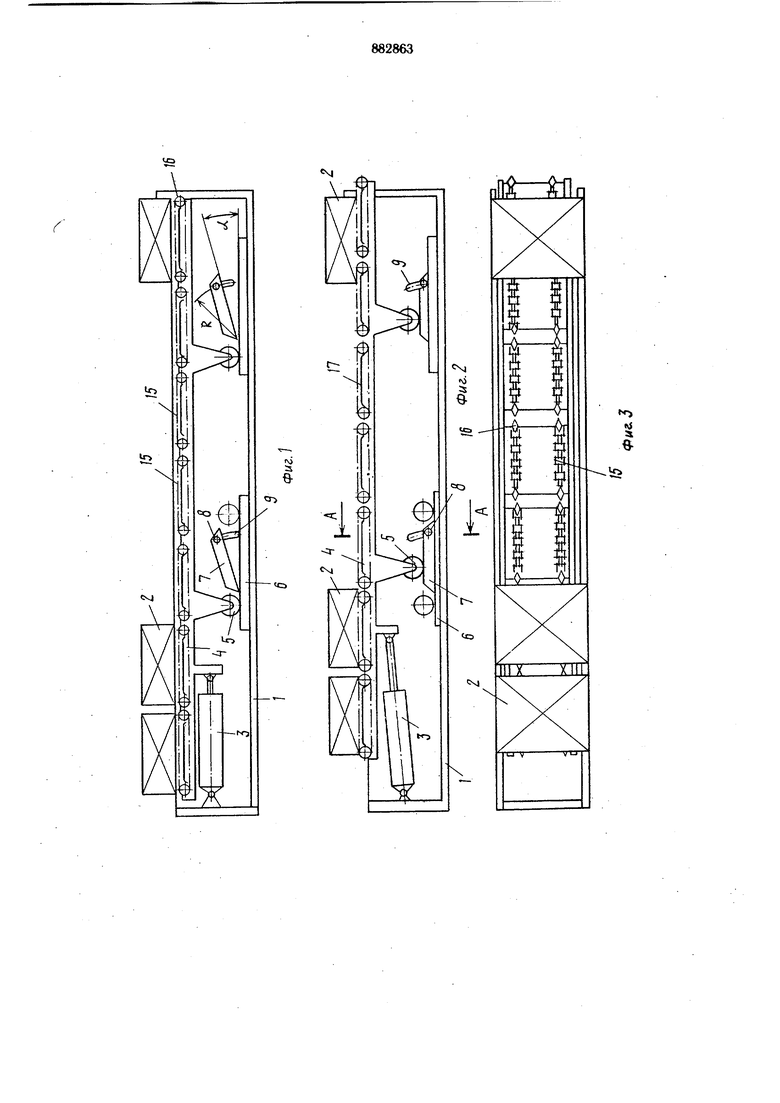
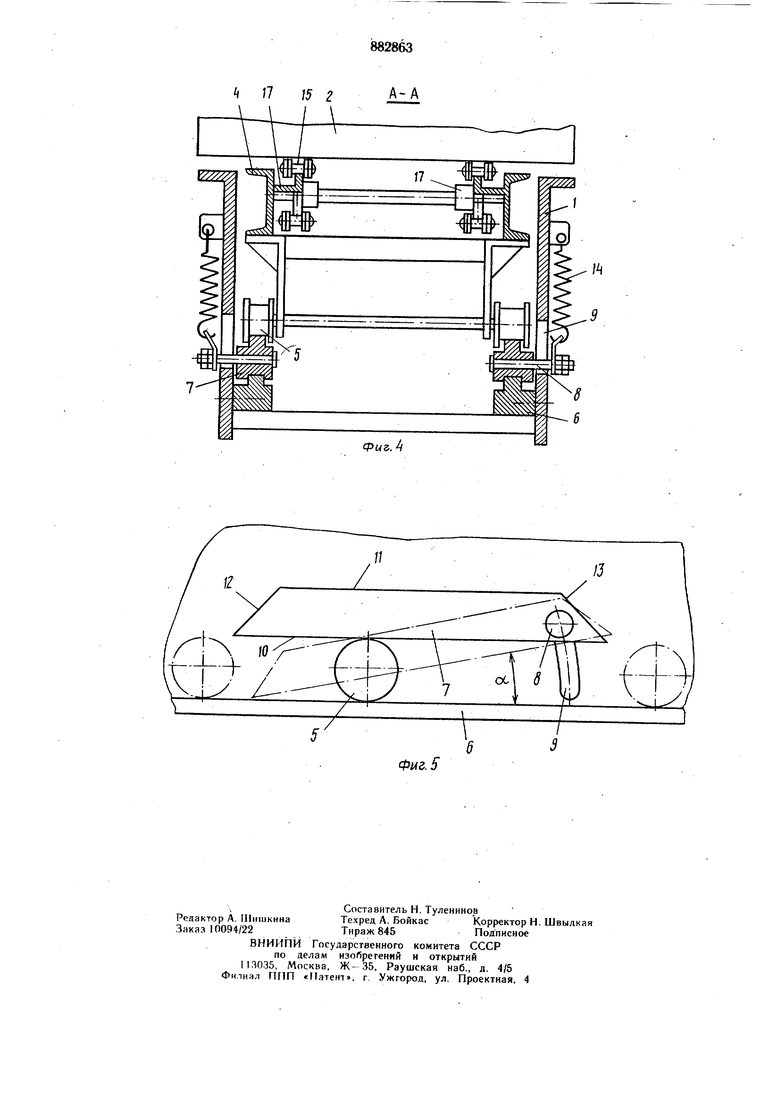
(54) ШАГОВЫЙ КОНВЕЙЕР Изобретение относится к промышленному транспорту, в частности к конвейерам для перемещения грузов в горизонтальном направлении. Известен шаговый конвейер, содержащий неподвижную раму и перемещающуюся от привода подвижную раму, причем подвижная рама выполнена в виде грузонесущей платформы, шарнирно прикрепленной к кривошипам, расположенным взаимно параллельно, один из которых связан с приводом конвейера I. Недостаток этого конвейера в том, что он не удовлетворяет требованиям упорядоченного накопления транспортируемых изделий. Наиболее близким к предлагаемому по технической сущности является шаговый конвейер, содержащий неподвижную раму с копирами, подвижную раму с роликами, соединенную с приводным механизмом и установленную на направляющих, аакрепленных на неподвижной раме с возможностью вертикального и горизонтального перемещения 21. Однако конвейер не обеспечивает упорядоченного скопления транспортируемых изделий, особенно на конце конвейера. В случае скопления изделий несущая поверхность подвижной рамы проскальзывает относительно изделий, что повреждает их донную часть, а также вызывает повышенную потребность мощности привода. Цель изобретения - исключение повреждения изделий при их иакоплеиии на конце конвейера. Поставленная цель достигается тем, что несущая поверхность подвижной рамы выполнена из ряда попарно установленных и бесконечно замкнутых огибающих звездочки роликовых цепей, расположенных последовательно вдоль продольной оси подвижной рамы, при этом звездочки установлены с возможностью свободного вращения. На фиг. 1 схематически изображеи конвейер в исходном положении, продольный разрез; на фиг. 2 - конвейер в работе; на фиг. 3 - конвейер вид сверху; на фиг. 4- разрез А-А на фиг. 2; на фиг. 5 - схема взаимного положения копира и подвижной рамы прн ее обратном ходе. .На неподвижной раме I конвейера установлены транспортируемые изделия 2. Корпус приводного механизма - силового цилиндра 3, шарнирио соединен с неподвижной рамой I, а шток цилиндра шарнирно соединен с подвижной рамой 4, снабженной колесами 5, которые установлены на прямолинейных направляющих 6, закрепленных на неподвижной раме 1. К раме 1 также присоединены копиры 7, пальцы 8 которых зак)1ючены в радиусных пазах 9. Рабочие поверхности копиров 7, состоящие из горизонтальных 10 и 11 и наклонных 12 и 13 участков, представляют собой трапеции (фиг. 5). Каждый копир 7 от воздействия пружины 14 (фиг. 4) имеет возможность поворачиваться относительно передней кромки, так как паз 9 изготовлен по дуге окружности и подобран соответствующей длины. Это положение копира 7 является исходным (фиг. 5). Каждый копир 7 также установлен с возможностью поворота относительно пальца 8. Несущая поверхность подвнжной рамы 4 состоит из ряда попарно расположенных и бесконечно замкнутых роликовых цепей 15. Цепи натянуты на звездочках 16 с шагом, равным или кратным длине транспортируемых изделий 2. Для предотвращения провисания цепей предусмотрены направляющие 17, взаимодействующие с роликами цепей 15 (фиг. 4). В концевой части конвейера смонтированы ограничители. Конвейер работает следующим образом. При рабочем ходе силового цилиндра 3 колеса 5 подвижной рамы 4 взаимодейст вуют с накопленнымн участками 12 копиров 7, которые и приводят их в горизонтальное положение. Происходит подъем подвижной рамы 4 вместе с транспортируемыми изделиями 2. При дальнейшем выдвижении штока силового цилиндра 3/1одвижная рама 4 вместе с изделиями передвигается по горизонтальному участку 11 копиров 7. В конце рабочего хода штока силового цилиндра 3 колеса 5 подвижной 4 скатываются по наклонным участкам 3 копира 7 - подвижная рама смещается вниз относительно неподвижной рамы 1, а изделие 2 укладывается на неподвижную раму I. Колеса 5 выходят из зацепления с копира ми 7 и устанавливаются на направляющих 6. При обратном ходе приводного механизма 3 колеса 5 подвижной рамы 4 взаимодействуют с горизонтальными участками 10 копиров 7, которые посредством пружин 14 поворачивают пальцы 8. Когда взаимодействне колес 5 с горизонтальными участками 10 копиров 7 прекратится, копиры 7 от воздействия собственного веса займут исходное положение. Далее цикл повторяется. При перемещении изделия в концевую часть конвейера, оно прекращает движение, упираясь в ограничитель. В этом случае проскальзывают роликовые цепи 15, а изделие находится в покое относительно своего носителя, т. е. бесконечных роликовых цепей. В случае скопления нескольких изделий 2 в конце конвейера впереди стоящие изделия служат в качестве ограничителя горизонтального перемещения. Такое выполнение конструкции конвейера позволяет обеспечить упорядоченное сосредоточение транспортнруемых изделий в случае их скопления на конце конвейера. Особенно это удобно для транспортирования пищевых продуктов, упакованных в нежесткую тару. Замена трения скольжения между изделиями и подвижной рамой на трение качания между бесконечными це-. пями 15 и их направляющими 17 позволяет уменьшить энергоемкость привода и конвейера в целом. Формула изобретения Шаговый конвейер, содержащий неподвижную раму с копирами, подвижную раму с роликами, соединенную с приводным механизмом и установленную на направляющих, закрепленных на неподвижной раме с возможностью вертикального и горизонтального перемещения, отличающийся тем, что, с целью исключения повреждения изделий при их накоплении на конце конвейера, несущая поверхность подвижной рамы выполнена из ряда попарно установленных и бесконечно замкнутых огибающих роликовых цепей, расположенных последовательно вдоль продольной оси подвнжной рамы, при этом звездочки установлены с возможностью свободного вращения, Источники информации, принятые во внимание при экспертизе 1- Авторское свидетельство СССР № 382562, кл. В 65 G 25/04, IGjL 2. Авторское свидетельство-СССР № 515699, кл. В 65 G 25/04, 1976 (прототип).
lO
vp
e
-N-J
/5 г
А-А
Фмг. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1973 |
|
SU515699A1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Шаговый конвейер | 1974 |
|
SU564230A1 |
| Шаговый конвейер | 1979 |
|
SU867799A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |