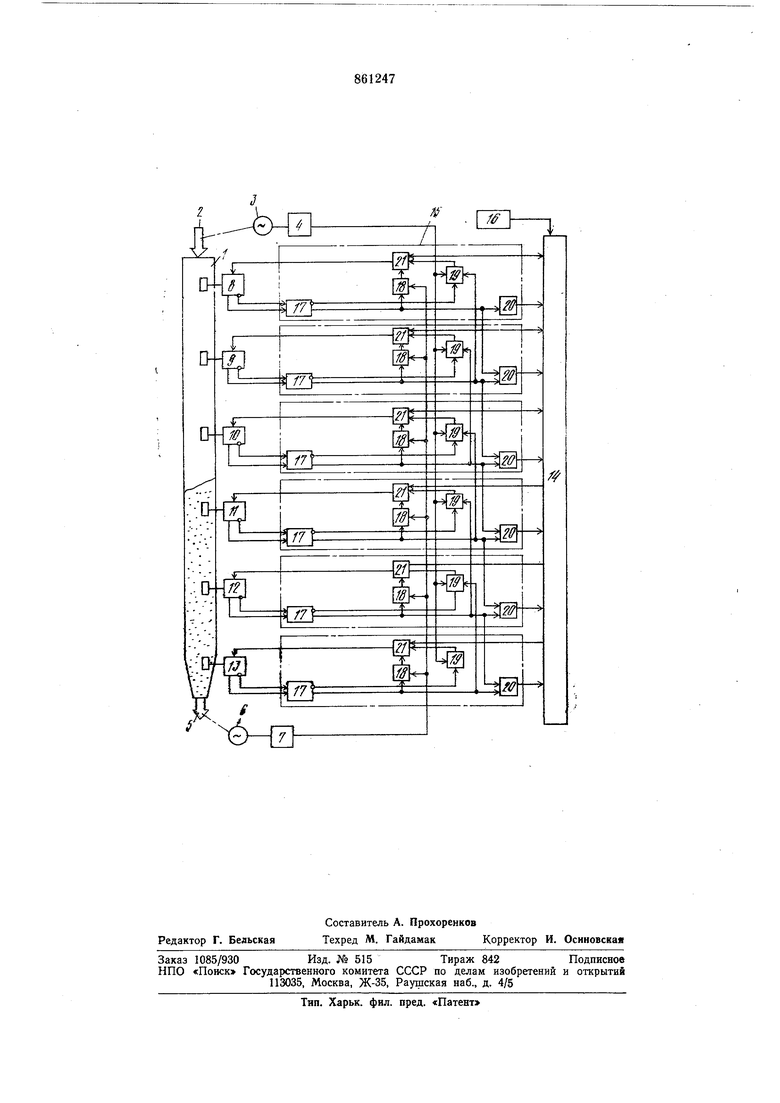
В бункере / установлены датчик 8-13 уровня материала.
В зависимости от конкретной технологии производства число датчиков может быть различным, в общем случае от двух до п. На чертеже условно показано шесть датчиков.
Устройство содержит также пульт 14 управления с элементами сигнализации (не показаны), блоки 15 коммутации по числу датчиков уровня и блок 16 питания. Каждый блок 15 коммутации выполнен на элементах 17 «Память, 18, 19 И, 20 «Запрет, 21 ИЛИ.
Выход элемента 20 «Запрет подключен ко входу соответствующего элемента сигнализации пульта 14 управления, а вход совместно с одним из входов элемента 18 И, запрещающим входом элемента 20 «Запрет предыдущего блока 15 коммутации и одним из входов элемента 19 И последующего блока 15 коммутации соединен с прямым выходом элемента 17 «Память.
Другие входы элементов 18 и 19 подключены соответственно к блоку 7 пуска механизма разгрузки и блоку 4 нуска механизма загрузки.
Третий вход элемента 19 И каждого блока 15 коммутации подключен к инверсному выходу элемента 17 «Память, прямой и обратный входы которого соединены с выходами соответствующего датчика S-13 уровня.
Блок 15 коммутации может быть реализован на бескоитактных и релейно-контактных элементах.
Работает устройство следующим образом.
При необходимости получения информации об уровне материала в бункере / с пульта 14 управления оператор через элементы 21 ИЛИ посылает управляющий импульс, по которому одновременно получают питание все датчики 8-13 уровня.
Если в это время уровень материала в бункере / находится, например, в зоне датчика 11, то датчик // срабатывает и сигнал с его прямого выхода поступает на вход элемента 17 «Память соответствующего блока 15 коммутации.
Элемент 17 «Память запоминает эту информацию, которая через разрещающий вход элемента 20 «Запрет блока 15 комМ5тации поступает на элемент сигнализации пульта 14 управления, на котором и отображается контролируемый уровень материала в буНкере /.
При этом, после запоминания полученной информации, питание всех датчиков 8-13 уровня прекращается.
При включении механизма 2 загрузки информация об этом с блока 4 поступает на один из входов всех элементов 19 И.
Па другие входы элемента 19 И блоков 15 коммутации, соответствующих датчикам уровня 8-10, т. е. находящихся выще датчика уровня 11, сигнал поступает с инверсных выходов элементов 17 «Память. Однако на третьем входе будет сигнал только у элемента 19 И, соответствующего датчику 10 уровня, который поступает с элемента 17 «Память предыдущего блока 15 коммутации, относящегося к датчику // уровня.
Сигнал с выхода элемента 19 И через элемент 21 ИЛИ поступает на вход датчика 10 уровня, который включается для контроля увеличивающегося уровня материала в бункере 1.
При достижении материалом в бункере / соответствующего уровня датчик 10 срабатывает, что фиксируется подключенным к нему элементом 17 «Память и сигнализируется на пульте 14 управления.
В результате этого исчезает сигнал на инверсном выходе элемента 17 «Память, соответственно на втором входе элемента 19 И. Датчик 10 уровня обесточивается, а датчик 9 уровня получает питание, поскольку появился сигнал на третьем входе элемента 19 И соответствующего блока 15 коммутации.
в случае включения в работу механизма 5 разгрузки информация об этом с блока 7 пуска механизма разгрузки поступает на первые входы элементов 18 И. Сигнал-на втором входе появляется у элемента 18 И, который связан с тем датчиком 8-13 уровня, в зоне которого находится материал, например с датчиком // уровня.
По сигналу с выхода этого элемента 18 И через элемент 2} ИЛИ получает питание датчик L1 уровня, а при снижении уровня ниже контролируемой им зоны датчик 11 обесточивается, и получает питание датчик 12 уровня.
При работе как механизма 2 загрузки, так и механизма 5 разгрузки питание получают датчики 10 и 12 уровня, если до включения этих механизмов уровень материала в бункере / был в зоне, контролируемой датчиком И уровня.
Работа устройства при одновременном включении механизмов загрузки и разгрузки не отличается от выщеонисанной.
Устройство обеспечивает при загрузке и разгрузке питание только одного датчика. При отсутствии этих операций ни один из датчиков электроэнергии не потребляет. При возобновлении операций загрузкиразгрузки бункера автоматически включается только один датчик уровня, в зоне которого находится материал.
Таким образом, снижается расход электроэнергии на питание датчиков уровня.
Формула изобретения
Устройство для контроля уровня материала в бункере, содержащее датчики уровня, блоки пуска механизмов загрузки и разгрузки бункера, блоки коммутации по числу датчиков уровня, выполненные на элементах И, ИЛИ и «Память, и пульт управления с элементами сигнализации, отличающееся тем, что, с целью уменьщения потребляемой электроэнергии, каждый блок коммутации снабжен элементом «Запрет, выход которого подключен к входу соответствующего элемента сигнализации пульта управления, а вход совместно с одиим из входов одного из элементов И, запрещающим входом элемента «Запрет предыдущего блока коммутации и одним из входов другого элемента И
последующего блока коммутации соединен с прямым выходом элемента «Память, другие входы элементов И подключены к входам блоков пуска механизмов загрузки и разгрузки бункера, третий вход второго элемента И подключен к инверсному выходу элемента «Память, прямой и обратный входы которого соединены с выходами датчика уровня, выходы элементов И и пульта управления с элементами сигнализации подключены- через элемент ИЛИ к входу датчиков уровня.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 445844, кл. G 01 F 23/10, 1972.
2.Авторское свидетельство СССР № 325636, кл. В 65 G 63/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство для автоматической загрузки материала в бункера | 1979 |
|
SU889577A1 |
| Устройство управления вибрационным питателем для загрузки железнодорожных вагонов | 1989 |
|
SU1791288A1 |
| Устройство для управления дозатором | 1986 |
|
SU1413436A2 |
| Устройство управления загрузкой расходного бункера | 1979 |
|
SU774949A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗАГРУЗОЧНОГО МЕХАНИЗМА | 1971 |
|
SU293743A1 |
| Система автоматического управления роторным конвейером | 1986 |
|
SU1361506A1 |
| Устройство для управления дозатором | 1985 |
|
SU1283537A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАЗГРУЗКОЙ БУНКЕРОВ | 1991 |
|
RU2040491C1 |
| Устройство управления дозатором | 1988 |
|
SU1606874A1 |