Изобретение относится к средствам механизации и автоматизации перегрузки паковок в производстве химволокон.
Цель изобретения - расширение функциональных возможностей путем обеспечения позиционирования каретки манипулятора при ее разгрузке.
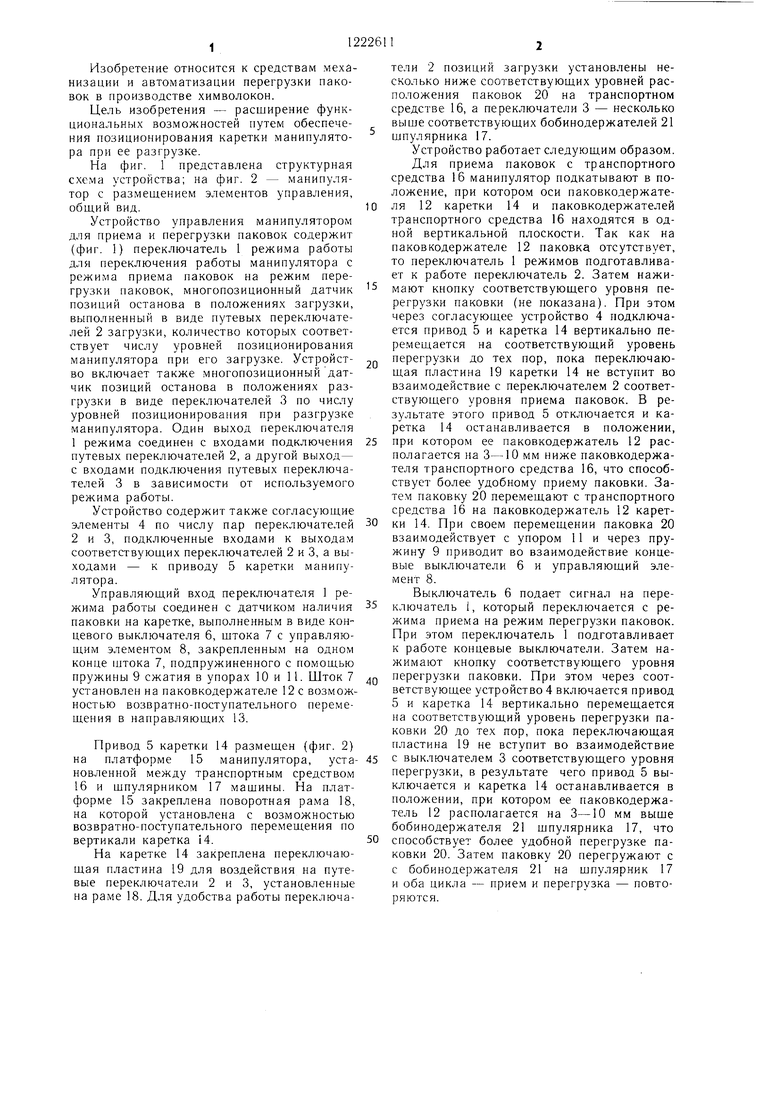
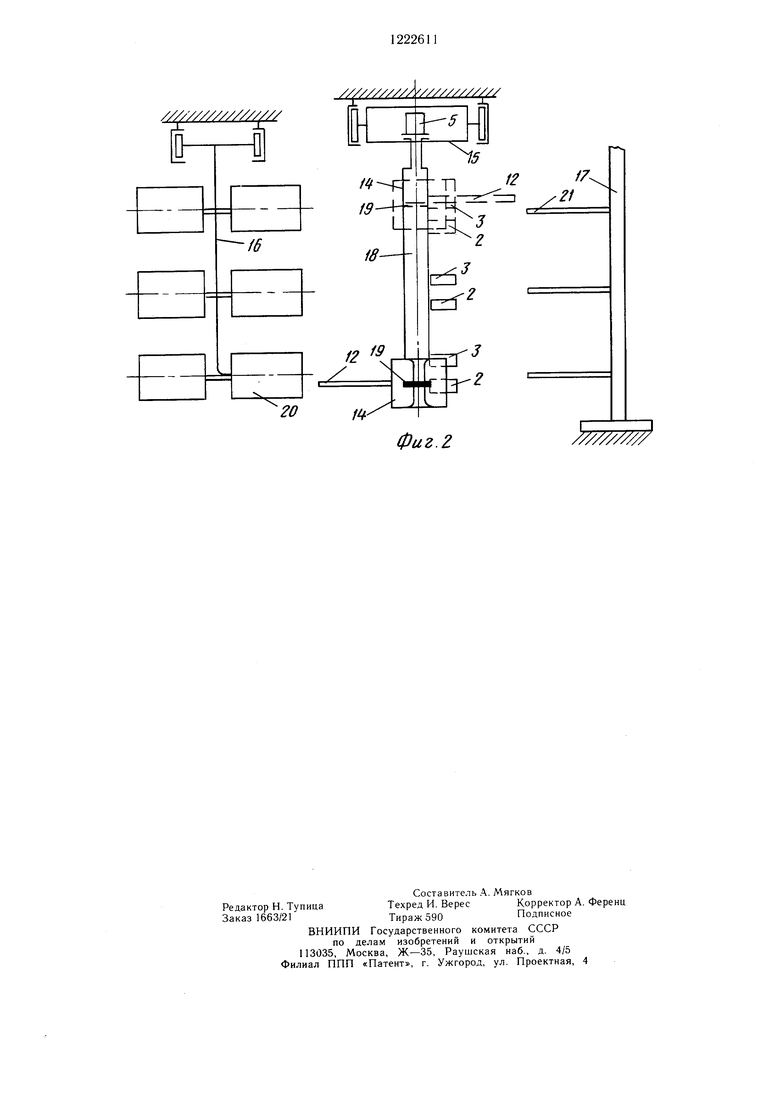
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - манипулятор с размещением элементов управления, общий вид.
Устройство управления манипулятором для приема и перегрузки паковок содержит (фиг. 1) переключатель 1 режима работы для переключения работы манипулятора с режима приема паковок на режим перегрузки паковок, многопозиционный датчик позиций останова в положениях загрузки, выполненный в виде путевых переключателей 2 загрузки, количество которых соответствует числу уровней позиционирования манипулятора при его загрузке. Устройст- во включает также мпогопозиционный датчик позиций останова в положениях разгрузки в виде переключателей 3 по числу уровней позиционирования при разгрузке манипулятора. Один выход переключателя
1режима соединен с входами подключения путевых переключателей 2, а другой выход-
с входами подключения путевых переключателей 3 в зависимости от используемого режима работы.
Устройство содержит также согласующие элементы 4 по числу пар переключателей
2и 3, подключенные входами к выходам соответствующих переключателей 2 и 3, а выходами - к приводу 5 каретки манипулятора.
Управляющий вход переключате тя 1 режима работы соединен с датчиком наличия паковки на каретке, выполненным в виде концевого выключателя 6, щтока 7 с управляющим элементом 8, закрепленным на одном конце ujTOKa 7, подпружиненного с помощью пружины 9 сжатия в упорах 10 и 11. Шток 7 установлен на паковкодержателе 12 с возможностью возвратно-поступательного перемещения в направляющих 13.
Привод 5 каретки 14 размещен (фиг. 2) на платформе 15 манипулятора, уста новленной между транспортным средством 16 и щпулярником 17 мащины. На платформе 15 закреплена поворотная рама 18, на которой установлена с возможностью возвратно-поступательного перемещения по вертикали каретка 14.
На каретке 14 закреплена переключающая пластина 19 для воздействия на путевые переключатели 2 и 3, установленные на раме 18. Для удобства работы переключа5
Q
5
0
д
5 0
тели 2 позиций загрузки установлены несколько ниже соответствующих уровней расположения паковок 20 на транспортном средстве 16, а переключатели 3 - несколько выще соответствующих бобинодержателей 21 щпулярника 17.
Устройство работает следующим образом.
Для приема паковок с транспортного средства 16 манипулятор подкатывают в положение, при котором оси паковкодержате- ля 12 каретки 14 и паковкодержателей транспортного средства 16 находятся в одной вертикальной плоскости. Так как на паковкодержателе 12 паковка отсутствует, то переключатель 1 режимов подготавливает к работе переключатель 2. Затем нажимают кнопку соответствующего уровня перегрузки паковки (не показана). При этом через согласующее устройство 4 подключается привод 5 и каретка 14 вертикально перемещается на соответствующий уровень перегрузки до тех пор, пока переключающая пластина 19 каретки 14 не вступит во взаимодействие с переключателем 2 соответствующего уровня приема паковок. В результате этого привод 5 отключается и каретка 14 останавливается в положении, при котором ее паковкодержатель 12 располагается на 3-10 мм ниже паковкодержа- теля транспортного средства 16, что способствует более удобному приему паковки. Затем паковку 20 перемещают с транспортного средства 16 на паковкодержатель 12 каретки 14. При своем перемещении паковка 20 взаимодействует с упором 11 и через пружину 9 приводит во взаимодействие концевые выключатели 6 и управляющий элемент 8.
Выключатель 6 подает сигнал на переключатель 1, который переключается с режима приема на режим перегрузки паковок. При этом переключатель 1 подготавливает к работе концевые выключатели. Затем нажимают кнопку соответствующего уровня перегрузки паковки. При этом через соответствующее устройство 4 включается привод 5 и каретка 14 вертикально перемещается на соответствующий уровень перегрузки паковки 20 до тех пор, пока переключающая пластина 19 не вступит во взаимодействие с выключателем 3 соответствующего уровня перегрузки, в результате чего привод 5 выключается и каретка 14 останавливается в положении, при котором ее паковкодержатель 12 располагается на 3-10 мм выще бобинодержателя 21 щпулярника 17, что способствует более удобной перегрузке паковки 20. Затем паковку 20 перегружают с с бобинодержателя 21 на щпулярник 17 и оба цикла - прием и перегрузка - повторяются.
//////////////////
Фиг.г
///////////
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки паковок | 1990 |
|
SU1710475A1 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Устройство для перегрузки паковок | 1990 |
|
SU1726347A1 |
| Устройство для приема с намоточной машины и перегрузки наработанных паковок на транспортные средства | 1983 |
|
SU1105434A1 |
| Устройство для приема наработанных паковок с намоточной машины и перегрузки их на транспортные средства | 1985 |
|
SU1326531A1 |
| Механизм съема паковок с мотальных машин с двухместными паковкодержателями | 1981 |
|
SU1011482A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ПАКОВОК С ТРАНСПОРТЕРА И ПЕРЕГРУЗКИ ИХ НА ТРАНСПОРТНЫЙ МОДУЛЬ | 1992 |
|
RU2036830C1 |
| Устройство для приема и отвода паковок от машин формования химических нитей | 1983 |
|
SU1138377A2 |
| Автоматизированный шпулярник для сновальных машин | 1985 |
|
SU1266905A2 |
| Устройство для ориентированной установки паковок текстильной машины на накопитель | 1977 |
|
SU679661A1 |
| Устройство управления манипулятором для приема и перегрузки паковок с рабочих мест | 1979 |
|
SU861260A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
