(54) МЕХАНОГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механогидравлический привод пресса | 1981 |
|
SU967855A1 |
| Механогидравлический привод кузнечно-прессовой машины | 1982 |
|
SU1071454A1 |
| Гидравлический пресс | 1981 |
|
SU1031762A1 |
| Механогидравлический приводКузНЕчНО-пРЕССОВыХ МАшиН | 1979 |
|
SU795974A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 1991 |
|
RU2006369C1 |
| Гидромеханический пресс | 1992 |
|
SU1819182A3 |
| Устройство для производства разделительных операций | 1982 |
|
SU1050819A1 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| Механогидравлический пресс | 1990 |
|
SU1784473A1 |
| Механогидравлический пресс | 1990 |
|
SU1784472A1 |
1
Изобретение относится к машиностроению, а именно к конструкциям приводов для прессов.
Известен механогидравлический привод пресса, состоящего из станины со смонтированным в ней гидравлическим рабочим цилиндром с плунжером, амортизатора и регулируемого упора, содержащий эксцентриковый насос с нагнетательной камерой, соединенной гидролинией с полостью рабочего цилиндра и через перепускной клапан с приводом от электромагнита - со сливной магистралью. В данном устройстве рабочий ход совершается при подаче импульсного давления от эксцентрикового насоса в полость рабочего давления 1.
Недостаток устройства заключается в том, что оно не обеспечивает работу пресса в режиме пульсирующего изменения величины рабочего усилия с той частотой, на которой привод работает в режиме автоматических ходов с постоянной величиной закрытой высоты, что снижает техно югические возможности машин, так как не позволяет осуществлять на нем таких операций, как пробивка отверстий в толстолистовом материале.
Цель изобретения - расширение технологических возможностей за счет пульсирующего изменения рабочего усилия.
Указанная цель достигается за счет того, что механогидравлический привод пресса, состоящего из станины со смонтированным
5 в ней гидравлическим рабочим цилиндром с плунжером, амортизатора и регулируемогоупора, содержащий эксцентриковый насос с нагнетательной камерой, соединенной гидролинией с полостью рабочего цилиндра
,« и через перепускной клапан с приводом от электромагнита - со сливной магистралью, снабжен дополнительным эксцентриковым насосом с управляемым гидрораспределителем, дополнительным гидроцилиндром с корпусом и плунжером и промежуточным
15 звеном, выполненным в виде рамки. При этом дополнительный гидроцилиндр установлен соосно с рабочим цилиндром и в его корпусе смонтирован регулируемый упор, плунжеры упомянутых гидроцилиндров связаны между собой промежуточным звеном,
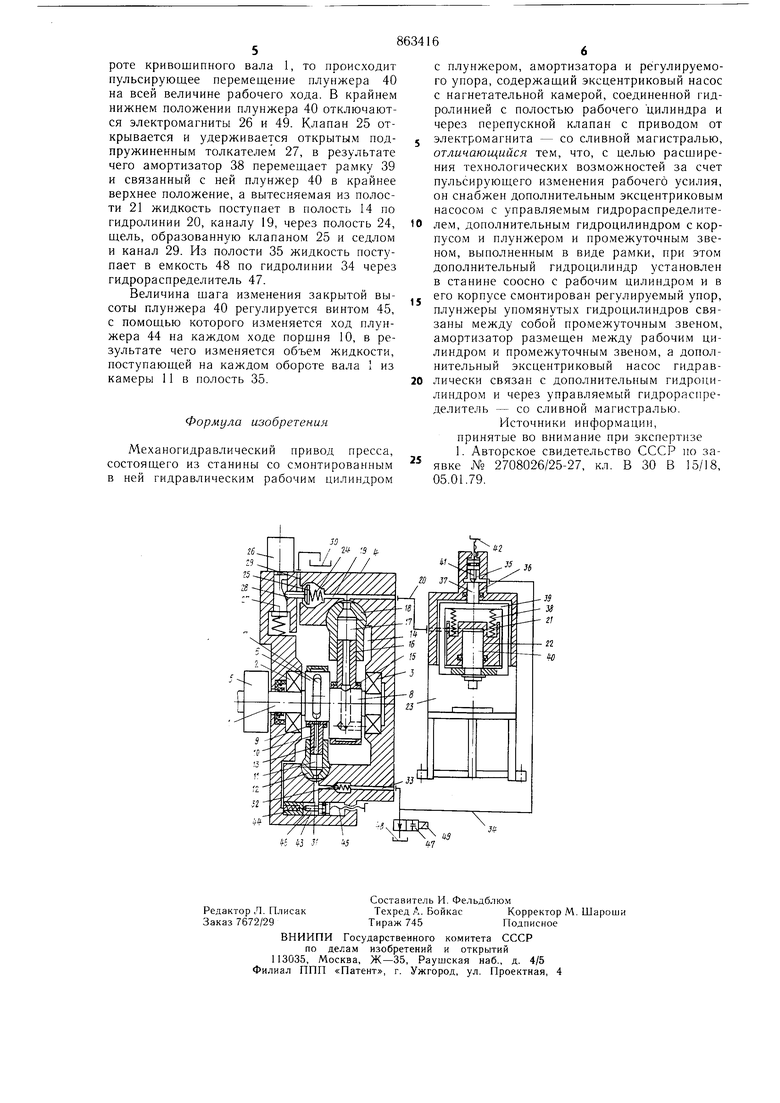
20 амортизатор размещен между рабочим цилиндром и промежуточным звеном, а дополнительный эксцентриковый насос гидравлически связан с дополнительным гидроцилиндром и через управляемый гидрораспределитель - со сливной магистралью. На чертеже приведена схема предлагаемого привода. Механогидравлический привод содержит кривошипный вал 1, установленный на подшипниках 2 и 3 в корпусе 4. На кривошипном валу 1 размешены маховик 5, эксцентрик 6 с пазом 7 и эксцентрик 8. На эксцентрике 6, жестко связанном с кривошипным валом 1, размешен удерживаемый кольцом 9поршень 10 дополнительного эксцентрикового насоса, приводимый указанным валом, образуюший камеру И в цилиндре 12, установленном своей сферической частью в корпусе 4. В поршне 10 выполнен канал 13, соединяюший через паз 7 камеру 11 с полостью 14 корпуса 4 при движении поршня 10на увеличение объема камеры 11. На кривошипе 8 размещен удерживаемый кольцом 15 поршень 16 эксцентрикового насоса, образующий нагнетательную камеру 17 в цилиндре 18, установленном своей сферической частью в корпусе 4. Нагнетательная камера 17 каналом 19 и гидролинией 20 соединена с полостью 21 гидравлического рабочего цилиндра 22, установленного на станине 23 пресса. Канал 19 соединен с полостью 24, в которой установлен подпружиненный перепускной клапан 25, управляемый электромагнитом 26 через подпружиненный толкатель 27 и хвостовик 28. Подклапанная полость клапана 25 соединена каналом 29 с полостью 14 и со сливной магистралью с емкостью 30. Камера 11 дополнительного эксцентрикового насоса соединена каналом 31 через обратный клапан 32, каналом 33 и гидролинией 34 с полостью 35 дополнительного гидроцилиндра, содержащего корпус 36 и плунжеры 37, ограничивающие подъем амортизатором 38 промежуточного звена, выполненного в виде рамки 39, закрепленной на плунжере 40 рабочего гидроцилиндра 22. В корпусе 36 дополнительного гидроцилиндра установлен регулируемый упор 41, перемещаемый с помощью винта 42. В корпусе 4 выполнена полость 43, в которой размещен прдпружиненный плунжер 44 и, перемещаемый винтом 45, упор 46. Гидролиния 34 соединена через управляемый гидрораспределитель 47 с емкостью 48. Управление гидрораспределителем 47 осуществляется от электромагнита 49. Привод работает следующим образом. При вращении кривошипного вала 1, например, от электродвигателя (на чертеже не показан) эксцентрик 6 и кривошип 8 перемещают возвратно-поступательно, соответственно, поршень 10 в цилиндре 12 и поршень 16 в цилиндре 18. При движении поршня 10, обеспечивающем увеличение объема камеры 11, последняя заполняется рабочей жидкостью,-поступающей из полости 14 через паз 7 и по каналу 13, а при возвратном движении поршня 10 рабочая жидкость вытесняется из камеры 11 в емкость 48 по каналу 31 через обратный клапан 32, канал 33 и открытый распределитель 47. При движении порщня 16, обеспечивающем увеличение объема нагнетательной камеры 17, последняя заполняется рабочей жидкостью, поступающей из полости 14 по каналу 29 через щель, образованную клапаном 25 и седлом, полость 24 и по каналу 19. При движении поршня 16, обеспечивающем уменьшение объема нагнетательной камеры 17, жидкость вытесняется в полость 14 в обратном направлении. При минимальном объеме камеры 17 по команде включаются электромагниты 26 и 49. Электромагнит 26 перемещает толкатель 27, а электромагнит 49 - золотник гидрораспределителя 47 и отсоединяет магистраль 34 от емкости 48. При развороте кривошипа 8 в положение, соответствующее максимальному объему камеры 17j пружина закрывает клапан 25, а при дальнейшем развороте кривошипа 8 жидкость из нагнетательной камеры 17 поступает по каналу 19 и гидролинии 20 в полость 21 рабочего гидроцилиндра 22 и перемещает плунжер 40 в нижнее положение. Одновременно с перемещением плунжера 40 перемещается и плунжер 37 дополнительного гидроцилиндра под воздействием жидкости, вытесняемой поршнем 10 из камеры И по каналу 31 через обратный клапан 32, по каналу 33 и гидролинии 34 в полость 35. Величина перемещения плунжера 37 меньше величины перемещения плунжера 40 из-за соответствующего подбора диаметров поршней 10 и 16 и плунжеров 37 и 40, а также величин эксцентриситета эксцентрика 6 и кривошипа 8. Возвращение поршня 16 в положение, соответствующее максимальному объему нагнетательной камеры 17, происходит в два этапа, отличающихся другот друга направлением потока жидкости, заполняющей камеру 17. На первом этапе - заполнение происходит за счет жидкости, вытесняемой амортизатором 38 из полости 21 по гидролинии 20 и каналу 19, а после того, как рамка 39 упрется в плунжер 37 и плунжер 40 остановится заполнение происходит за счет разрежения, создаваемого в камере 17 поршнем 16, в результате чего клапан 25 поднимается и жидкость из полости 14 поступает в рабочую камеру 17 по каналу 29 через щель, образованную клапаном 25 и седлом, полость 24 и по каналу 19. Таким образом, за один оборот кривошипного вала 1 происходит перемещение плунжера 40 в нижнее положение и возвращение его в верхнее положение, которое отличается от предыдушего положения на ве зичину перемещения под воздействием жидкости, поступившей из камеры 11, плунжера 37, а так как величина перемещения плунжера 40 от верхнего положения в нижнее положение постоянна на каждом обо
