(54) МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автопоезд для транспортировки тяжелых крупногабаритных изделий | 1972 |
|
SU753697A1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| РУЧНАЯ ТЕЛЕЖКА | 1992 |
|
RU2022857C1 |
| Мшина для мойки транспортных средств | 1974 |
|
SU562455A1 |
| МЕХАНИЗИРОВАННАЯ АВТОМОБИЛЬНАЯ ПАРКОВКА | 2012 |
|
RU2490409C1 |
| Многоопорное гусеничное транспортное средство | 1986 |
|
SU1373611A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Ходовая часть грузоподъемного средства | 1980 |
|
SU933611A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
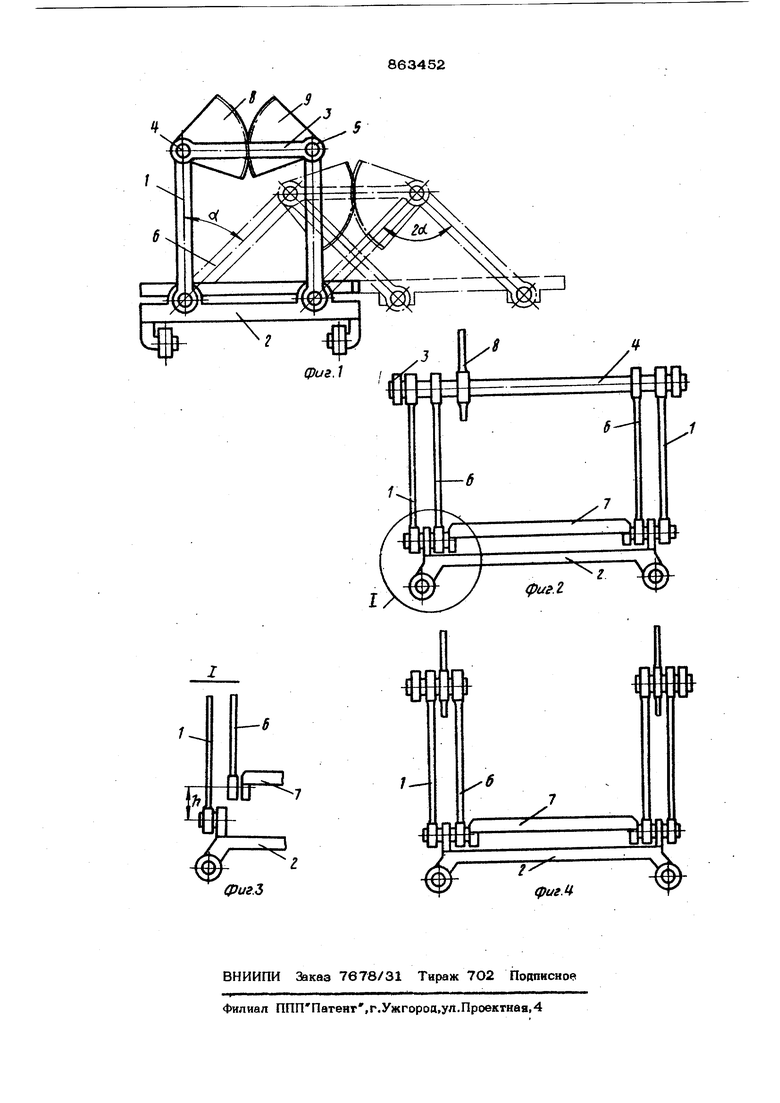
Изобретение относитх:я к транспорту, а именно, к механизмам перемещения грузовых платформ, например ручных тележек Известен механизм подъема грузовой платформы тележки, содержащий пары рычагов, одни концы которых шарнирно прикреплены к раме, а другие связаны с тягами, несущими грузовую Платформу Недостаток указанного механизма заключается в том, что он обеспечивает только строго прямолинейное вертикальное перемещение, что сужает технологические возможности. Наиболее близким техническим решением к изобретению ывляется механизм перемещения грузовой платформы, преимущественно тележек, содержащий щарнирно прикрепленные к раме пары параллелыных рычагов равной длины, соединительны элементы, к каждому из которых щарнир- но прикреплены концы указанных рычагов каждой пары, прикропленные к соединитель ным элементам с возможностью поворота в плоскостях, параллельных плоскостям поворота рычагов, пары параллельных тяг равной длины, свободные концы которых щарнирно связаны с грузовой платформой, по крайней мере одну пару зубчатых секторов, один из которых установлен на оси шарнирного соединения одного из рычагов с соединительным элементом и жестко связан с указанным рычагом, а другой - на оси шарнирного соединения одной из тяг с соединительным элементом и жестко связан с указанной тягой 2}. Недостаток указанного механизма заключается в том, что он не обеспе ивает возможности перемещения грузовой платформы в заданное положение, а обеспечивает лишь прямолинейное плоско-параллельное перемещение. Цель изобретения - расширение технологических возможностей, путем обеспечения установки грузовой платформы в требуемом положении. Для этого тяги и рычаги выполнены различной длины. На фиг. 1 изображен механизм перемещения грузовой платформы, установленной на тележке, общий вид; на фиг. 2 то же, вид сбоку; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - общий вид механизма сбоку, вариант выполнения. Механизм перемещения грузовой платформы состоит из поворотных в параллель ных вертикальных плоскостях пар парал, лельных друг другу рычагов 1, прикрепляемых, например, к раме 2 тележки, соединенных элементов 3, к каждому из которых шарнир но прикреплены концы одной из пар рычагов 1 посредством осей 4 и 5, пар параллельных тяг 6, 1Ч икрепленных посредством ocei 4 и 5 К соединительным элементам 3 в поворота ных в плоскостях, параллельных плоскостям поворота рычагов 1, грузовой платформы 7, к которой шарнирно прикреплены концы тяг 6, зубчатых секторов 8 и 9, прк этом сектор 8 установлен на оси 4 и жестко связан с одним из рычагов t, а сектор 9 установлен на оси 5 и жестко связан с одной иэ тяг 6. В зависимос ти от того, в какое положение необходимо переместить грузовую платформу 7, тяги б выполняют либо длиннее рычагов 1, либо короче kx. Механизм работает следующим образом. При повороте рычага 1, жестко связанного с сектором 8, на угол об вместе с ним поворачивается и упомянутый зубчатый сектор 8, который находится в зацеплении с зубчатым сектором 9, в результате чего жестко связанная с ним тяга 6 повернется вместе со всеми остальными тягами 6 на угрл с(,. При этом угол, образовавшийся между рычагами 1 и тягами 6, будет равен 2, а грузовая платформа 7 переместится в требуемое положение. В зависимости от соотношени длин рычагов 1 и тяг 6 характер и вели чина перемещения могут быть различным В случае, когда длина рычагов 1 боль ше длины тяг 6, грузовая платформа будет перемещается по криволинейной трае тории в сторону и вверх, Щ)И равной длине рычагов 1 и тяг б траектория переме щения будет прямолинейной Я грузовая платформа будет перемещатьсятолько в сторону на одном и том жеуровне. В случае, когда длина рычагов 1 мень ше длины тяг б, грузовая платформа 7 будет перемещаться по криволинейной траектории в сторону и вниз. Следует отметить, что при перемещении грузовой платформы 7 оси 4 и 5 опускаются, ограничивая тем с:амым высоту перемещаемого груза. Это можно устранить если установить две пары зубчатых секторов 8 и 9 на отдельных осях 4 и 5, как это изображено на фиг. 4. Применение описанного механизма, наiqjHMep на тележках, позволяет сократить затраты времени на погрузочно-разгрузочных работах. Примение механизма перемещения грузовой платформы на тележках 4-тележечных транспортеров обеспечит получение экономического эффекта на изготовление нх в размере около 17 500 руб. Формула изобретения Механизм перемещения грузовой платформы, преимущественно тележек, содержащий шаршрно прикрепляемые к раме параллельных равной длнны, соединительные элементы, к каждому из которых шарнирно прикреплены концы указанных рычагов каждой пары, прикрепленные к соединительным элементам с возможностью поворота в плоскостях, параллельных плоскостям поворота рычагов, пары параллельных тяг равной длины, свободные концы которых шарнирно связаны с грузовой платформой, по крайней мере одну пору зубчатых секторов, один из которых установлен на оси шарнирного соединения одного из рычагов с соединительным элементом и жестко связан с указанным рычагом, а другой - на оси шарн фного соединения одной из тяг с соединительным элементом и жестко связан с указанной тягой, отличак -ш и И с я тем, что, с целью расширения технологических возможностей путем обеспечения установки грузовой платформы в требуемом положении, тяги и рычаги выполнены различной длины. Источники информации, принятые во внимание прн экспертизе 1.Авторское смдетельство СССР N 42O5SO, кл. 66 F 7/26, 1972. 2.Патент США М 3116910, кл. 254126, 19641лрототкп). .
S
(риг. г
фиг.З
&
2 фиг Л
