Способ управления асинхронным двигателем шахтной подъемной машины, работаюшей с постоянной статической нагрузкой (например, скип с донной разгрузкой и уравновешиваюший канат), с при.менением динамического торможения до определенной скорости, известен.
Известные способы управления требуют установки механического рабочего тормоза, что приводит к усложнению схемы.
Предложенный способ отличается телг, что после динамического торможения двигатель переводят в тяговый режим до полной его остановки.
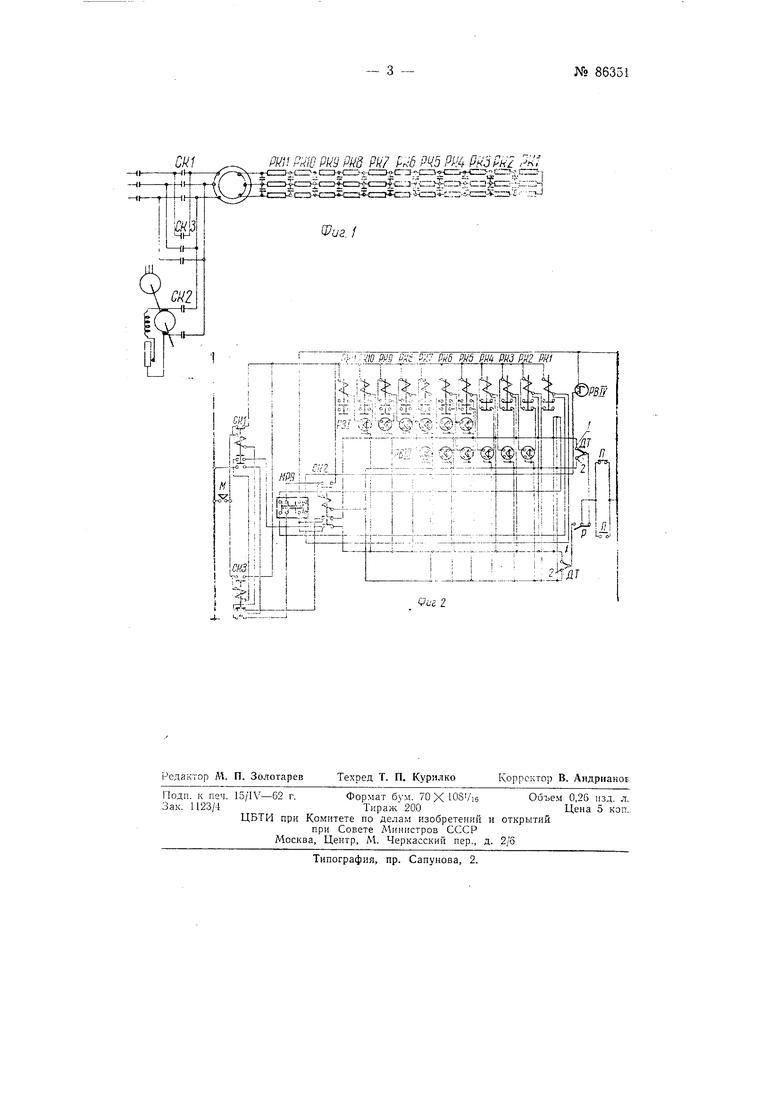
На фиг. 1 приведена принципиальная схема с ;ловой .цепи асинхронного двигателя подъемной машины, управляемой по предлагаемому способу; на фиг. 2 - электрическая схема его цепи управления.
Двигатель подъемной машины работает па четырехпериодному циклу: в первый период происходит его ускорение по времени; во второй период-работа при постоянной скорости; в третий период динамическое торможение по времени и в четвертый период - во время движения скипа В- криволинейных направляющих - тяговый режим ,на определенных реостатных характеристиках до полной остановки.
Подача в статор подъемного двигателя переменного тока при прямом и обратном двил сении и подача в статор постоянного тока соответственно производится трехполюсными контакторами С/С/ и СКЗ и двухполюсным контактором СК.2. Невозможность одновременного включения контакторов С/С/. СК2 и СКЗ обеспечивается электрической блокировкой.
Для получения требуюш,ейся от двигателя диаграммы моментов контактор СК (или СКЗ) должен быть включен в первом, втором и четвертом периодах, контактор СК2 - в третьем периоде.
Включение роторных сопротивлений осуществляется во всех периодах одной системой роторных контакторов (РК.1... РКП). Последовательность и-продолжительность включения этих контакторов опредеNO 86351
ляется либо установкой реле времени РВ для запуска, окаг ывающегося в первый период под напряжением от блок-контактов включенного статор.ного контактора СК (или СКЗ), либо реле времени PBIII торможения, которое оказывается под напряжением после переключения замыкателя динамического торможения ДТ с контакта / на контакт 2 от блок-контактов включающегося при этом статорного контактора СК2.
В начале четвертого периода, т. е. после динамического торможения, происходит включение контактора СК2 и вновь контактора С/С/ (или СК.З), осуществляемое реле времени МРВ, включающимся вместе с контактором СК2 и имеющем установку по времени, соответствующую всей продолжительности третьего периода движения. Включение необходимых при работе в четвертом периоде сопротивлений в цепь ротора производится соответствующим ротором контактором РК1 через его реле времени PBIV и через блок-контакты реле времени МРВ, замыкающиеся при его срабатывании. Невключение в этот момент других роторных контакторов обеспечивается размыкающимися блок-контактами реле времени.
Необходимое в первом и третьем периодах мгновенное включение контактора РК,1 на всю продолжительность этих периодов обеспечивается нормально замкнутыми блок-контактами реле времени МБР, нормально же разомкнутые блок-контакты реле времени AIPB при этом выключают реле времени PBIV контактора РК.}. При работе в четвертом периоде срабатывание реле времени РВ} контактора РК.1 вызывает переход на следующую реостатную характеристику, если это требуется.
Замыкатель динамического торможения ЦТ устанавливается в стволе в точке, соответствующей пути, пройденному скипом в первом и втором периодах.
Разгрузка скипов фиксируется переключателем Р. Его включенные очередным скипом контакты подготавливают систему к реверсированию. При его выключении снимается напряжение с соответствующего замыкателя погрузки П, контакты последнего размыкаются и система подготавливается к следующему циклу подъема того же направления движения.
Система работает автоматически при замыкалии контактов М мащинистом, чем исчерпывается участие последнего в управлении. Включение может быть произведено один раз на всю смену, если погрузка происходит по расписанию.
Контакты погрузки Я блокируются с главным сетевым выключателем, выключая последний через определенный промежуток времени в случае, если в течение этого времени погрузка скипа не произощла.
Предмет изобретения
Способ управления асинхронным двигателем щахтной подъемной машины, работающей с постоянной статической нагрузкой (например, скип с донной разгрузкой и уравновещивающий канат), с применением динамического торможения до определенной скорости, о т л и ч а ю ui и йся тем, что, с целью отказа от механического рабочего торможения, после динамического торможения двигатель переводят в тяговый редким до полной его остановки. РШ1 Рт - - Pl Д% РмРн2 ./ -vcro -cr scTi Kzrs-crrb rjr:;--. .a fcr trvjczilcr; ;fczH з-5-1.-м:пп ггз r,T-i
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Устройство для автоматического управления электроприводом подъемных установок | 1949 |
|
SU87377A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПАУНДНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 1935 |
|
SU46970A1 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| Тиратронное устройство для автоматического управления асинхронным двигателем | 1960 |
|
SU139412A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277747C1 |
| Устройство для контроля динамического торможения шахтных автоматизированных подъемных установок | 1961 |
|
SU141536A1 |
| Асинхронный электропривод подъемнойМАшиНы | 1979 |
|
SU801212A2 |