(5А) СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ БУМАГОДЕЛАТЕЛЬНЫХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для продольной и поперечной резки бумажного полотна | 1987 |
|
SU1532306A1 |
| Транспортное средство для перевозки длинномерных грузов | 1989 |
|
SU1668179A1 |
| Устройство для поперечной резки рулонных материалов | 1979 |
|
SU962382A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Конвейерный гусеничный привод | 1990 |
|
SU1778047A1 |
| Устройство для перегрузки бытовых отходов из мусоропровода в транспортное средство | 1989 |
|
SU1752692A1 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| Устройство для передвижения по вертикальным опорам Л.Н.Бульмана | 1991 |
|
SU1796217A1 |
| Устройство для передвижения каретки со стеклом | 1983 |
|
SU1142458A1 |
| Устройство для передвижения каретки со стеклом | 1982 |
|
SU1049442A1 |
Изобретение относится к машино строению и может быть использовано в тех областях народного хозяйства, где требуется непрерывный контроль ф зических характеристик материалов в процессе их производства, например в целлюлозно-бумажной проилшленности где в процессе отлива бумажного поло на требуется непрерывный контроль таких характеристик, как влажность, вес 1 м -белична, толщина и т.п. Известно сканирующее устройство, содержащее одну или две каретки с размещенными на них датчиками. В сл ча.е наличия одной каретки она располагается над бумажным полотном, а в случае наличия двух кареток одна из них располагается над полотном, а другая под бумажным полотном. Каретки соединены с тяговым элементом, представляющим собой бесконечную замкнутую втулочно-роликовую цепь, получающую движение от привода, в состав которого входит элеки) двигатель и редуктор. Изменение на правления движения каретки осуществляется реверсированием электродвигателя til Недостатком устройства является низкая надежность его работы и невозможность реверсирования каретки на любом участке контролируемого полотна. Цепь изобретения заключается в повышении надежности работы устройства за счет исключения реверсирования двигателя, а также обеспечение реверсирования каретки на любом . участке контролируемого полотна. Поставленная цель достигается тем, что сканирующее устройство, содержащее гибкий тяговый орган и соединенную с Ю1М каретку с датчиком, редуктор и электродвигатель, содержит механизм переключения каретки, включающий {шчаг с пазом, жестко связаншлй с кареткой, и ролик, закрепленый на тяговом органе и установленный пазу рычага.
Кроме того, устройство содержит ополнительный гибкий тяговый орган и ополнительньй механизм переключения ода каретки, включающий жестко закепленные на каретке верхнюю и нижнюю оси, звездочки, свободно установенные на осях, и тягу с электромагнитом, соединенную со звездочками осредством муфт сцепления.
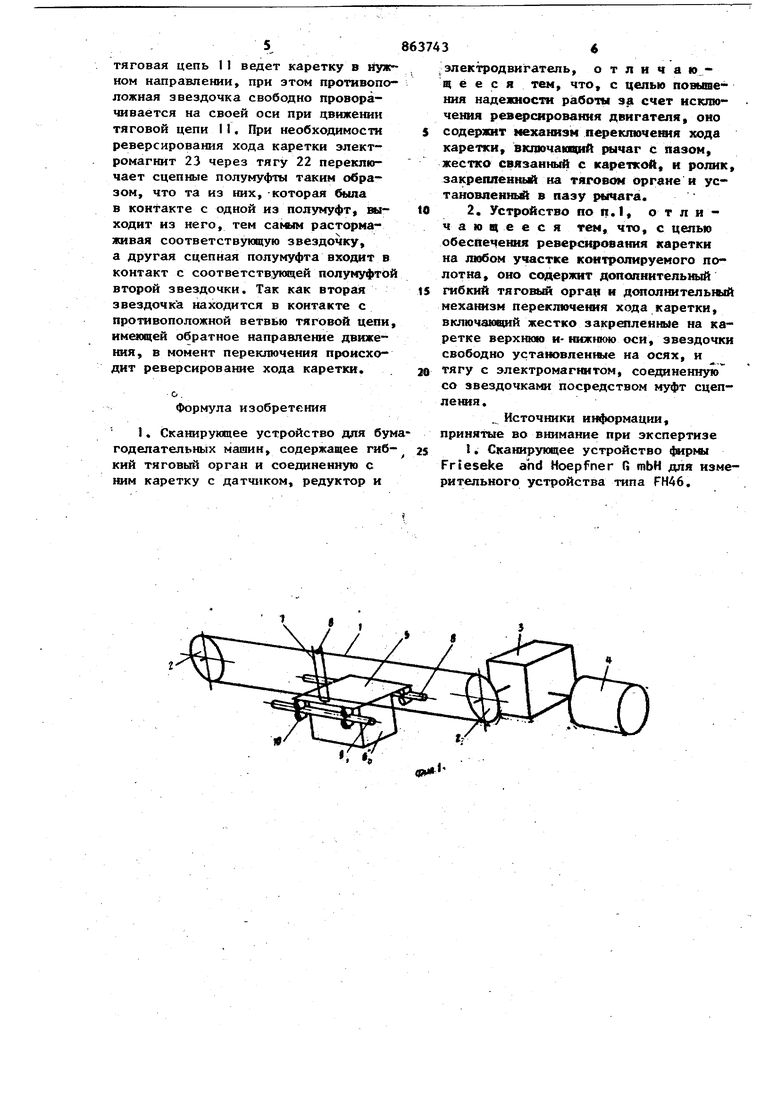
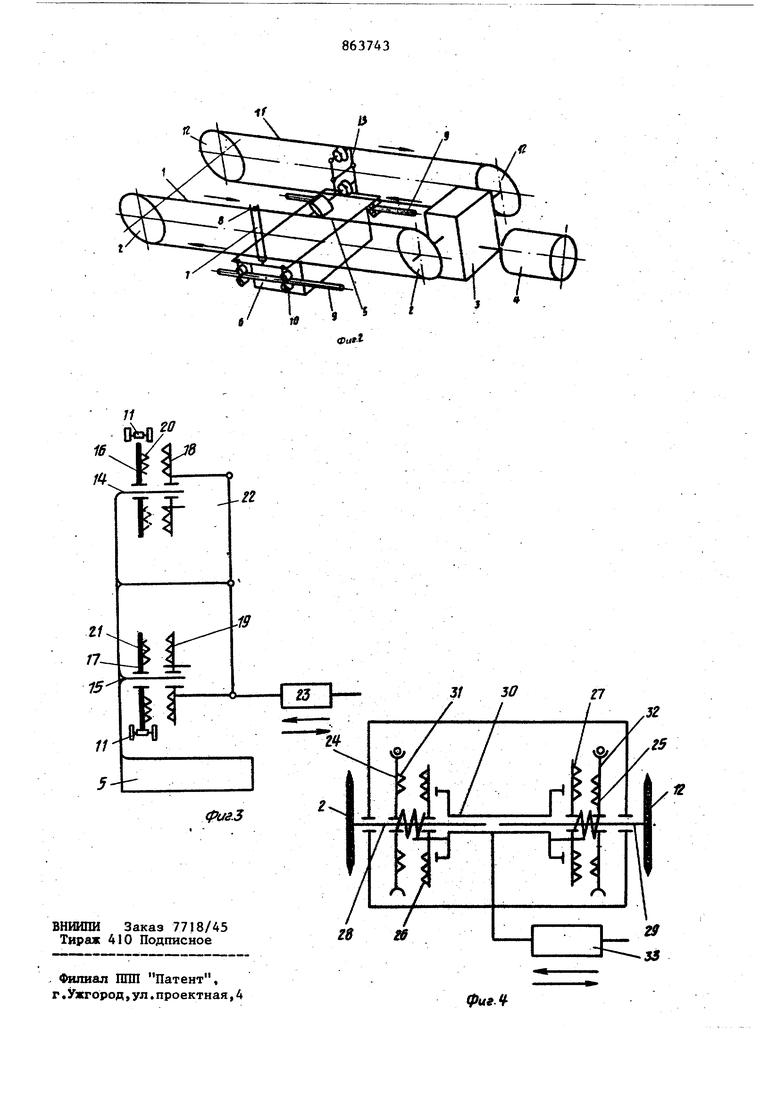
На фиго изображено сканирующее стройство, общий вид; на фиг.2 вариант выполнения устройства для сканирования по всей ширине и на любых участках контролируемого материаа; на фиг.З - механизм переключения хода каретки; на фиг.4 - редуктор сканирукмдего устройства.
Сканирунндее устройство содержит бесконечно замкнутую тяговую цепь 1, установленную на концевых звездочках 2, связанных с редуктором 3, двигатель 4,. каретку 5, на которой крепится датчик 6, механизм переключения хода каретки с попеременной связью каретки с прямой и обратной ветвью гибкого тягового органа, включающий рычаг 7, жестко связанный с кареткой 5, и ролик 3, закрепленный на тяговой цепи 1 и установленный в пазу рычага 7. Каретка установлена на направляющих 9 посредство ходовых роликов 10. Сканирующее устройство может содержать дополнительную тяговую цепь 11, установленную на звездочках 12, дополнительный механизм 13 переключения хода каретки, содержащий две оси 14 и 15, жестко связанные с кареткой 5, на кото1}ых свободно посажены звездочки 16 и 17 и жестко установлены сцепные полумуфты 18 и 19 с возможностью продольного перемещения вдоль оси. На звездочках 16 и 17 расположены полумуфты 20 и 21, которые вхвдят в зацепление соответственно с полумуфтами 18 и 19 тяги 22, управляемой электромагнитом 23. Звездочки 16 и 17 находятся в зацеплении с верхней и нижней ветвью гибкой тяговой цепи П. Редуктор сканирукяцего устройства может содержать два приводных червячных колеса 24 и 25, две сцепные полумуфты 26 и 27, два вала 28 и 29, толкатель 30. Приводные червячные колеса 24 и 25 снабжены полумуфтами 31 и 32, соответственно. Приводное червячное колесо 24 свободно посажено на валу 28. Полумуфта 31
входит в зацепление с полумуфтой 26, установленной также на валу 28 с возможностью продольного перемещения вдоль вала посредством толкателя 30,
управляемого электромагнитом 33. Аналогично выполнена другая часть редуктора.
Устройство работает следуюодам образом.
В основном режиме работы сканирую щего устройства с реверсированием хода каретки в крайних положениях тяговый орган 1, подключенный к электродвигателю 4 через редуктор 3, перемещает каретку 5 с датчиком 6 посредством механизма переключения хода каретки с попеременной связью каретки с прямой и обратной ветвью гибкого тягового органа, а именно рычага 7
с ропиком 8. При достижении кареткой крайнего положения, что соответствует положению звена тяговой цепи 1 с роликом 8 на горизонтальной оси одной из звездочек 2, происходит реверсирование хода каретки вследствие перехода звена цепи с роликом на обратную ветвь цепи, имеющую направление движения, .противоположное прямой ветви. При круговом перемещении звена цепи с роликом вместе со звездочкой при переходе с верхней на нижнкж) ветвь тяговой цепи ролик перемещается Braia по пазу рычага, а при переходе с. нижней на верхнюю ветвь ролик перемещается по пазу рычага вверх. При режиме работы с реверсированием хода каретки на любом участке контролируемого материала к электродвигателю 4 через редуктор 3 подключается цепь I1. Толкатель 30, управляемый электромагнитом 33, nepeN ta ет сцепную полумуфту 27 вдоль вала 29 до соединения с полумуфтой 32. При этом происходит передача движения от электродвигателя через червячную передачу 25 к валу 29, на котором закреплена звездочка 12, которая приводит в движение гибкую тяговую цепь. При этом в зависимости от йеобходимого направления двиасениь i apencH
0 стопорится звездочка 16 иди IT.nocpeflCT BOM электромагнита 23 через тягу 22 одна из сцепных полумуфт 18 или 19 входит в зацепление с соответствую щей полумуфтой 20 или 21. При этом
5 соответствукнцая звездочка 16 или 17 стопорится относительно своей оси 14 или 15 и вьшолняет функцию толкателя, посредством которого
тяговая цепь I1 ведет каретку в нуж ном направлении, при этом противоположная звездочка свободно проворачивается на своей оси при движении тяговой цепи II. При необходимости реверсирования хода каретки электромагнит 23 через тягу 22 переключает сцепные полумуфты таким образом, что та из них, -которая была в контакте с одной из полумуфт, выходит из него, тем самям растормаживая соответствующую звездочку, а другая сцепная полумуфта входит в контакт с соответствующей полумуфтой второй звездочки. Так как вторая звездочка находится в контакте с противоположной ветвЬю тяговой цепи, имшощей обратное направление движения, в момент переключения происходит реверсирование хода каретки. .
о. Формула изобретения
, электродвигатель, о т л и ч а ё е с я тем, что, с цепью повышения надежности работы за счет исключения реверсирования двигателя, оно содержит неханиэм переключения хода карепсиу включающий рычаг с пазом, жестко связанный с кареткой, и ролик закрепленный на тяговом органе и установленньД в пазу рычага.
Источники и} ормации, принятые во внимание при экспертизе
I. Сканирующее устройство фирмы Frieseke and Hoepfner R тЬН для измерительного устройства типа FH46. I «: ;
6 ia
e
