(54) АВТООПЕРЛТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Минипулятор | 1990 |
|
SU1743849A1 |
| Автоматическая линия изготовления прутковых длинномерных изделий | 1980 |
|
SU920343A1 |
| Устройство для останова иглы в заданном положении на швейной машине | 1980 |
|
SU979545A2 |
| Автооператор к автомату контроля магнитопроводов | 1984 |
|
SU1259347A1 |
| Устройство для установки клиньев в пазы якорей электрических машин | 1980 |
|
SU920969A1 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| Механизм зигзага швейной машины | 1979 |
|
SU857318A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Автоматическое устройство для изготовления электродных блоков химического источника тока | 1980 |
|
SU902114A1 |
1
Изобретение относится к машиностроению, а именно к автооператорам для автоматизации вспомогательных операций на предприятиях при штамповке, механической обработке, литье, сборке и т.д.
Известен автооператор, содержащий механическую руку с передними и задними жесткими упорами, привод продольного пермещения, выполненный в виде силового цилиндра, регулируемые упоры, расположенные на поворотном блоке, и механизм поворота блока, вьтолненный в виде копирного устройства, содержащего втулку с пазами, толкатель и кулачок 1.
Недостатком известного автооператора является сложность конструкции.
Цепь изобретения - устранение указанного недостатка. Цель достигается тем, что толкатель выполнен корончатым, а кулачок жестко связан с пово- ротным блоком, причем один конец кО рончатого толкателя контактирует с передними жесткими упоргши, а дру гой - с кулачком.
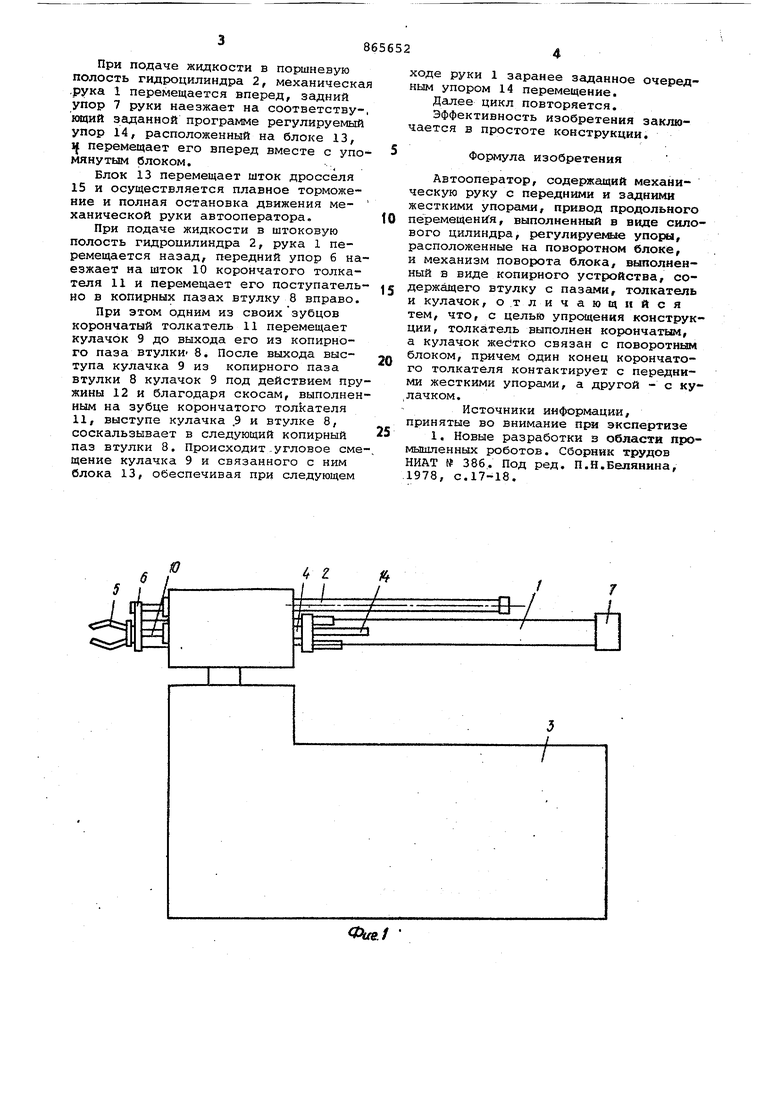
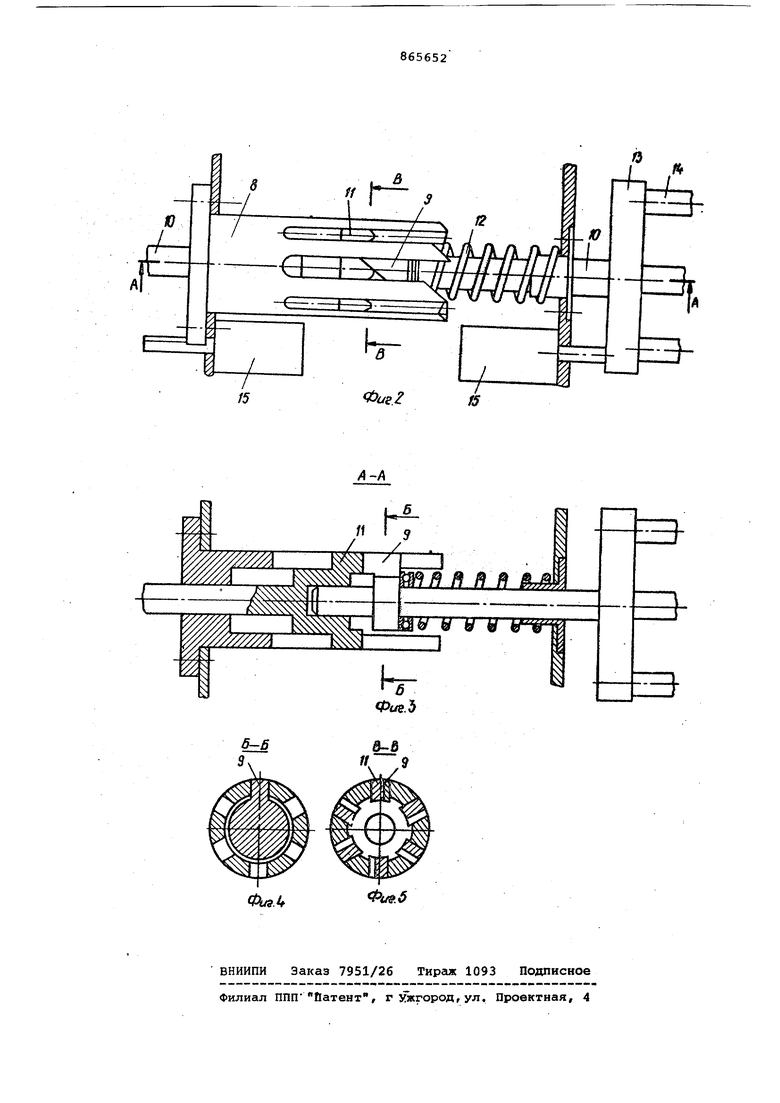
На фиг. 1 изображен aBTOonepSTOpj общий вид; на фиг. 2 - механизм управления величиной перемещения меха.нической руки; на фиг. разрез
А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг.5 - сечение В-В на фиг. 2.
А.втооператор содержит механическую руку.1,гидроцилиндр 2 привода руки, основание 3,в котором смонтированы .механизмы подъема и поворота (не показаны) , механизм 4 управления величиной перемещения механической руки 1,
10 захват 5,передний жесткий упор б руки,задний.жесткий упор 7 руки.
Механизм 4 управления величиной перемещения механической руки включает в себя втулку 8 с копирными паза15ми, в одном из пазов установлен кулачок 9, который имеет скошенный выступ и возможность продольного и углового перемещений. Кулачок9 жестко связан со UITOKOM 10, контактирует с корончатым толкателем Ни подпружи20нен пружиной 12.
На конце штока 10 жестко закреплен блок 13 с регулируемыми упорами 14. Дроссели 15 служат для обеспечения торможения в конце хода руки (впер1ед25назад) и взаимодействуют - один с блоком 13 упоров, а другой - с жестким упором 6.
Автооператор работает следующим
30 образом.
при подаче жидкости в поршневую полость гидроцилиндра 2, механическая .рука 1 перемещается вперед, задний упор 7 руки наезжает на соответству-, кяций заданной программе регулируемый упор 14, расположенный на блоке 13, 1 перемещает его вперед вместе с упомянутым блоком.
Блок 13 перемещает шток дросселя 15 и осуществляется плавное торможение и полная остановка движения механической руки автооператора.
При подаче жидкости в штоковую полость гидроиилиндра 2, рука 1 перемещается назад, передний упор 6 наезжает на шток 10 корончатого толкателя 11 и перемещает его поступательно в копирных пазах втулку 8 вправо.
При этом одним из своих зубцов корончатый толкатель 11 перемещает кулачок 9 до выхода его из копирного паза втулки- 8. После выхода выступа кулачка 9 из копирного паза втулки 8 кулачок 9 под действием пружины 12 и благодаря скосам, выполненным на зубце корончатого толкателя 11, выступе кулачка .9 и втулке 8, соскальзывает в следующий копирный паз втулки 8. Происходит.угловое смещение кулачка 9 и связанного с ним блока 13, обеспечивая при следующем
ходе руки 1 заранее заданное очередным упором 14 перемещение.
Далее цикл повторяется.
Эффективность изобретения заключается в простоте конструкции.
Формула изобретения
Автооператор, содержащий механическую руку с передними и задними жесткими упорами, привод продольного перемещения, выполненный в виде силового цилиндра, регулируелале упоры, расположенные на поворотном блоке, и механизм поворота блока/ выполненный в виде копирного устройства, содержащего втулку с пазами, толкатель и кулачок, отличающийся тем, что, с целью упрощения конструкции, толкатель выполнен корончатым, а кулачок жейтко связан с поворотным блоком, причем один конец корончатого толкателя контактирует с передними жесткими упорами, а другой - с ку,лачком.
Источники информации, принятые во внимание при экспертизе
Фие./
А
15
Фие.г
