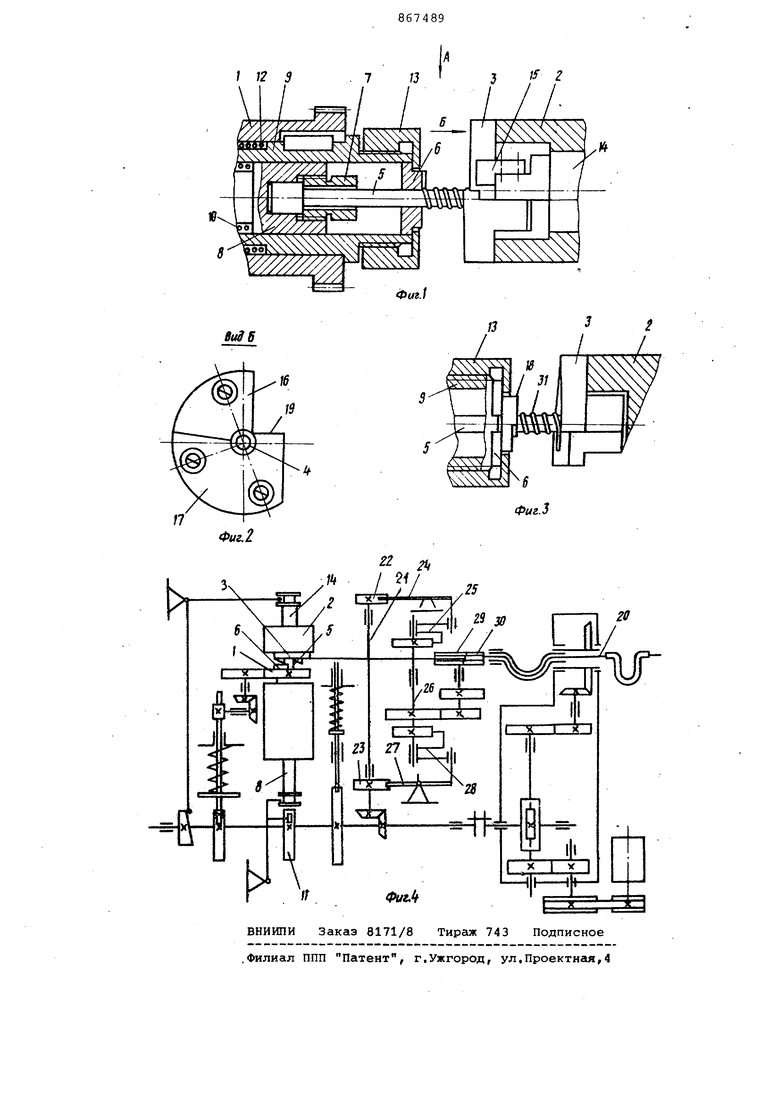
Изобретение относится к машиностроению, в частности к оборудованию для изготовления пружин круче™ , ния, широко испольэуелялх во всех областях народного хозяйства. Известно устройство для изготовления пружин кручения, содержащее смонтированные на станине с приводом механизмы подачи проволоки, навивки, резки и съема пружин l., Однако устройство имеет невысокую производительность, в нем отсутствует механизм-правки проволоки, проволока на навивку вытягивается вращающимся шпинделем, поэтому отсутствует регулироька подачи длины проволоки. Известно также устройство для изготовления пружин кручения с прямыми концами, содержащее смонтированные на станине с приводом механизмы пода чи проволоки, навивки, резки, обработки концов пружины, съема пружин .В устройстве механизм навивки состо ит из. шпинделя и прижима с пуансоном которые подходят к подаваемой проволоке с двух сторон 2. Недостатком этого устройства явля ется то, что его механизм навивки не обеспечивает жесткую фиксацию проволоки, так как к поданной механизмом подачи проволоке подходит пиноль шпмнделя, а навстречу перемещается прнжим. Встречное перемещение шпинделя и прижима относительно проволоки зафиксировать трудно. За счет упругих сил проволока мэжет выйти из захвата пиноли шпинделя на первом витке пружины, так как при навивке пиноль шпинделя перемещается от проволоки. Цель изобретения - повышение производительности автомата. Для достижения поставленной цели прижим жестко закреплен на станине и имеет втулку с торцовой винтовой поверхностью, а захват пиноли имеет Г-образную форму с рабочими поверхностями, плоскость одной из которыхсовпадает с осевой линией, а другая перпендикулярна ей и выполнена под острым углом к торцовой поверхности пиноли. На фиг. 1 представлен механизм навивки пружины с разрезом, общий вид на фиг. 2 - вид В на фиг.1, на фиг. 3 - вид А на фиг.1; на фиг. 4 кинематическая схема предлагаемого автомата (бункер для приема пружин условно не показан).
Механизм навивки автомата имеет шпиндель 1 и прижим 2, на котором установлена втулка 3, имеющая центральное отверстие 4, в которое входит соосная оправка 5 шпинделя 1.
Поводок 6 зафиксирован на оправк 5, которая гайкой 7 жестко закреплена на оправке 8, установленной внутри пиноли 9. Оправка 8 зажата пружиной 10 и кулачком 11. Между торцами шпинделя 1 и пиноли 9 установлена пружина 12 сжатия. Поводок б закреплен гайкой 13 на пиноли 9. Внутри прижима 2 с возможностью возвратно-поступательного движения помещен шток 14, на котором закреплен пуансон 15. Втулка 3 имеет вертикальную плоскость 16 и торцовую винтовую поверхность 17. На поводке 6 выполнен Г-образный захват 18. Уступ 19 втулки 3 расположен параллельно подаваемой проволоке 20. Механизм подачи имеет индивидугшьный распределительный вал 21 с кулачками 22 и 23. Кривошипно-шатунный механизм 24 с храповым механизмом 25 кинематически связан с валом 26, а механизм 27 через храповой механизм 28 также связан с валом 26, кинематически соединеннЕлм с ведущим роликом 29, к которому подпружинен ролик 30. На оправке 5 находится навиваемая пружина 31.
Автомат работает следующим образом.
Проволока 20 вручную заправляетс в ручьи роликов 29 и 30. Кулачок 23 через кривошипно-шатунный механизм 27 вращает посредством храпового механизма 28 вал 26 и проволока 20 подается в сторону шпинделя 1. Кри ошипно шатунным механизмом 27 выста ляется необходимая длина концов навиваемой пружины 31. По уступу 19 жестко установленной втулки 3 подаеся проволока 20, которая проходит НБ1Д выдвинутой оправкой 5. Осевое перемещение оправки 5 совместно с оправкой 8 к прижиму 2 продолжается под действием пружины 10. Более сильнйя пружина 10 поджимает пружину 12 и перемещает пиноль 9 с накидной гайкой 13 и поводком 6 до вертикальной плоскости 16 втулки, 3, Г-образный захват 18 поводка 6 встае над КОНЦО1.1 проволоки 20. Захват 18 поводка б и поверхность 16 втулки 3 фиксируют конец навиваемой пружины
31. За счет торцовой винтовой поверхности 17 втулки 3 зазор между втулкой 3 и захватом 18 поводка 6 минимальный. Таким образом, производится навивка первого витка пружины 31, с исключая сбег конца пружины 31 изпод Г-образного ззхвата 18. Второй конец пружины 31 фиксируется пуансоном 15, который выдвигается штоком 14, В процессе навивки пружины 31 кулачок 22 через кривошипно-шатунный механизм 24 посредством храпового механизма 25 вращает вал 26, ролик 29 и проволока 20 подается вперед.
Навитая пружина 31 отрезается от проволоки 20 механизмом отрезки. При
5 этом угол между концаинш пружины 31 может быть доведен автоматом до тре.буемой величины при помощи пуансона 15 и поводка 6. Оправка 8, перемещаясь к шпинделю 1 вместе с поводком
0 6, втягивает в него оправку 5 и навитая пружина 31 сбрасывается в бункер.
Использование предлагаемого устройства позволит значительно повысить
5 производительность навивки пружин за счет более надежной фиксации механизма формообразования и механизма подачи проволоки.
Формула изобретения
Автомат для изготовления пружин кручения, содержащий смонтированные на станине, кинематически связанные
с с механизмом правки и подачи проволоки, механизм навивки, состоящий из шпинделя, пиноли с захВ(атом на торцовой поверхности, оправки и прижима с пуансоном, и механизм отрезки, отличающийся тем, что, с
целью повышения производительности, прижим жестко закреплен на станине, и имеет втулку с торцовой винтовой поверхностью, а захват пиноли имеет Г-образную форму с рабочими поверх5 ностями, плоскость одной из которых совпадает с осевой линией, а другаяперпендикулярна ей и выполнена под острым углом к торцовой поверхности пинали.
0Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 375122, кл. В 21 F 3/04, 1973.
2.Авторское свидетельство СССР № 580934, кл. В 21 F 35/02, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Автомат для изготовления пружин кручения | 1987 |
|
SU1416250A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН ПРЕИМУЩЕСТВЕННО С МАЛЫМ ИНДЕКСОМ | 1990 |
|
RU2010652C1 |
| Автомат для изготовления пружин кручения | 1987 |
|
SU1416249A1 |
| Автомат для изготовления пружин кручения | 1976 |
|
SU580934A1 |
| ОСЬСОЮЗНАЯ mmm-jimriu'im | 1973 |
|
SU384278A1 |
| Автомат для изготовления изделий из проволоки | 1977 |
|
SU737080A1 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| Устройство для навивки плоских спиральных пружин | 1980 |
|
SU1016767A1 |