(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ
ТРАКТОРА ПО ПРОГРАММНОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического направления движения трактора | 1991 |
|
SU1766291A1 |
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Система автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU635910A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для автоматического вождения трактора по замкнутой траектории | 1983 |
|
SU1134126A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для испытания трактора на полигоне | 1980 |
|
SU932348A1 |
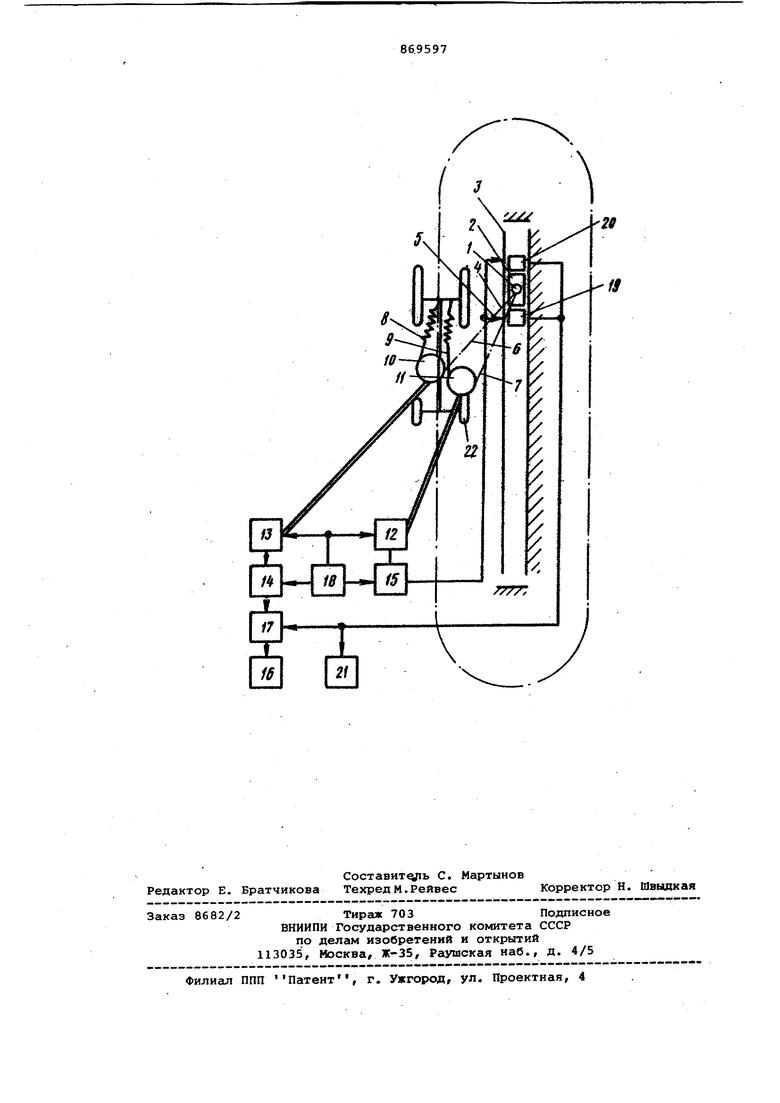
Изобретение относится к испытательному оборудованию, в частности, устройствам для автоматизации вожде ния тракторов при ресурсных или про ностных испытаниях на полигонах. Известно устройство для автомати ческого вождения трактора при испытаниях на треке, содержащее направляющую с тележкой, соединенной шарнирно тягой с кронштейном, установленным в передней части трактора, и систему изменения направления дви жения 11 . Недостатком устройства является большая металлоемкость и громоздкос Наиболее близким по Технической сущности к предложенному являемся устройство для автоматического вождения трактора по программной траек тории движения, включающее механическую связь трактора с осью, содер жащую ползун, преобразо1затели угло вых перемещений, амплитудно-Фазовые преобразователи и регуляторы с исполнительными механизмами 2. Недостатком устройства является ненадежная привязка щупа копира к маркерному следу. Целью изобретения является обеспечение автоматического ушгдвления трактором при движении по непересекающимся траекториям. Цель- достигается тем, что устройство снабжается сравнивающим устройстве, входы которого соединены с выходами амплитудно-фазовых преобразователей, а выход - с регулятором. Кроме того, с целью обеспечения управления на участке разворота прогpa « oй траекторий устрюйство снабжено концевыми выключателями, установленными на ползуне между одним из амплитудно-фазовых преобразовате-i лей и сравнивающим устройство. При этом с целью обеспечения устойчивости трактора на участке разворота программной траектории устройство снабжено регулятором скорости движения, вход которого соединен с конечными включателяАШ. На чертеже изображена схема устройства для автоматического вождения трактора по програидалной траектории двиисения. Устройство содержит механическую связь трактора с осью 1, включаюиую ползун 2 и неподвижные направляющие 3, причем ось посредством тросов 4 и 5 через втулочно роликовые, цепи 6,7, натянутыми пружинами 3, 9 соединяются с шестернями 10, 11, преобраэователи угловых перемещений 12 и 13, которые кинематически связаны с соответствующими шестерняьш 11 и 10, амплитудно-фазовые преобразовате ли 14, 15, регулятор с исполнительными механизмами 16, сравнивающее устройство 17, входы которого соедин ны с выходами амплитудно-Фазовых преобразователей 14 и 15, а выход с регулятором с исполнительными механизмами 16, источник питания 18, концевые выключатели 19, 20, установленные на ползуне 2 между амплитудно-фазовым преобразователем 15 и сравнивающим устройством 17, и регулятор 21 скорости движения, вход которого соединен с концевыми выключателями 19 и 20. При движении трактора 22 на прямо линейном участке программной траекто рии и сохранении заданного расстояния между продольными осями трактора 22 и направляющей 3, а также центра ми шестерен 10, 11 и оси 1 на выходе преобразователей угловых перемещений 12 и 13 сигналы равны нулю. Коэффициенты передачи амплитуднофазовых преобразователей 14 и 15 устанавливают пропорционально заданным расстояниям между центрами оси и шестерен 10 и 11 соответственно. При сохранении расстояния между продольными осями трактора 22 и направляющей 3 за счет выбора коэффициента передачи амплитудно-фазовых преобразователей 14, 15 сигнал на выходе сравнивающего устройства 17 равен нулю, т.е. трактор 22 не откл няется от программной траектории. В случае, изменения этого расстояния сигнал На выходе сравнивающего устройства 17 будет отличен от нуля, так как - 20 Д 2 ду где лу- отклонение расстоян между продольной ос трактора и неподвиж ной направляющей, расстояние между О 20 центрами оси 3 и ше терен 10, 11. йг„ - приращение расстоян о 20 попе речном смещении тра тора. Таким образом, при отклонении трактора 22 от программной траектории движения на выходе сравнивающего устройства 17, следовательно, и выходерегулятора с исполнительными механизмами 16 появится сигнал упра ления, воздействующий на исполнител ные механизмы трактора 22 так, что последний возвратится к программной траектории движения. При достижении ползуном 2 конца неподвижных направляющих 3 срабатывает соответствующий концевой вылючатель 19 (20), отключающий выод амплитудно-фазового преобразоваеля 15 от сравнивающего устройства 17, что обеспечивает движение тракора по круговому участку программной раектории и разворот трактора 22 ля движения в обратном направлении. ля обеспечения устойчивости трактора 22 на разворотном участке программной раектории по достижению ползуном 2 конца неподвижных направляющих 3, включается в работу также регулятор скорости движения 21. По окончании разворота концевой выключатель 19 вновь включает выход амплитудно-фазового преобразователя 15 к сравнивакмцему устройству 17, обеспечивая движение трактора по следующему участку программной траектории. Применение устройства позволяет автоматизировать вождение испытываемых тракторов на полигонах с любой непересекающейся программной траекторией движения, существенно снизить металлоемкость испытательного оборудования, максимально использовать площадь отводимого участка с заданным рельефом, приблизить условия испытаний на полигоне к эксплуатационным. Формула изобретения 1.Устройство для автоматического вождения трактора по программной траектории движения, содержащее механическую связь трактора с осью, включающую ползун, преобразователи угловых перемещений, амплитудно-фазовые преобразователи и регуляторы с исполнительными механизмами, о тличающееся тем, что, с целью обеспечения автоматического управления трактором при движении по непересекающимся траекториям, оно снабжено сравнивающим устройством, входы которого соединены с выходами амплитудно-фазовых преобразователей, а выход с регулятором. 2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения управления на участке разворота программной траектории, оно снабжено концевыми выключателями, установленными на ползуне между одним из амплитудно-фазовых преобразователей и сравнивающим устройством. 3.Устройство по п. 1, отличающееся тем, что, с целью обеспечения устойчивости трактора на участке разворота программной Т13аектории, оно снабжено регулятором скорости движения, вход которого соединен с конечными выключателями. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 599757, кл. А 01 В 69/04, 1975. 2.Авторское свидетельство СССР 320253, кл. А 01 В 69/04, 1970.
26
