Изобретение относится к испытательной технике и может быть использовано при ресурсных испытаниях тракторов на полигоне.
Известна система автоматического вождения трактора при испытаниях на полигоне, содержащая трос, одним концом соединенный с закрепленнь1М в центре полигона поворотным устройством, а другим - через натяжной механизм с рулевым приводом трактора fll.
Недостатком этой системы, является невозможность одновременного испытания нескольких тракторов.
Известна также система автоматического вождений тракторов при испытаниях на полигоне, содержащая поворотное устройство, связанное с трактором посредством троса, активные и пассивные датчики и программные блоки 21.
Недостатком известной системы является сложность конструкции поворотного устройства.
Цель изобретения - упрощение конструкции. Это достигается тем, что поворотное устройство выполнено из нескольких независимых секций, причем на каждой секции установлены пассивные и активные датчики, а выходы последних соединены с соответствующими программными блоками, кроме того поворотное устройство вьшолнено в виде вертикальной стойки, на которую насажены независимые секции.
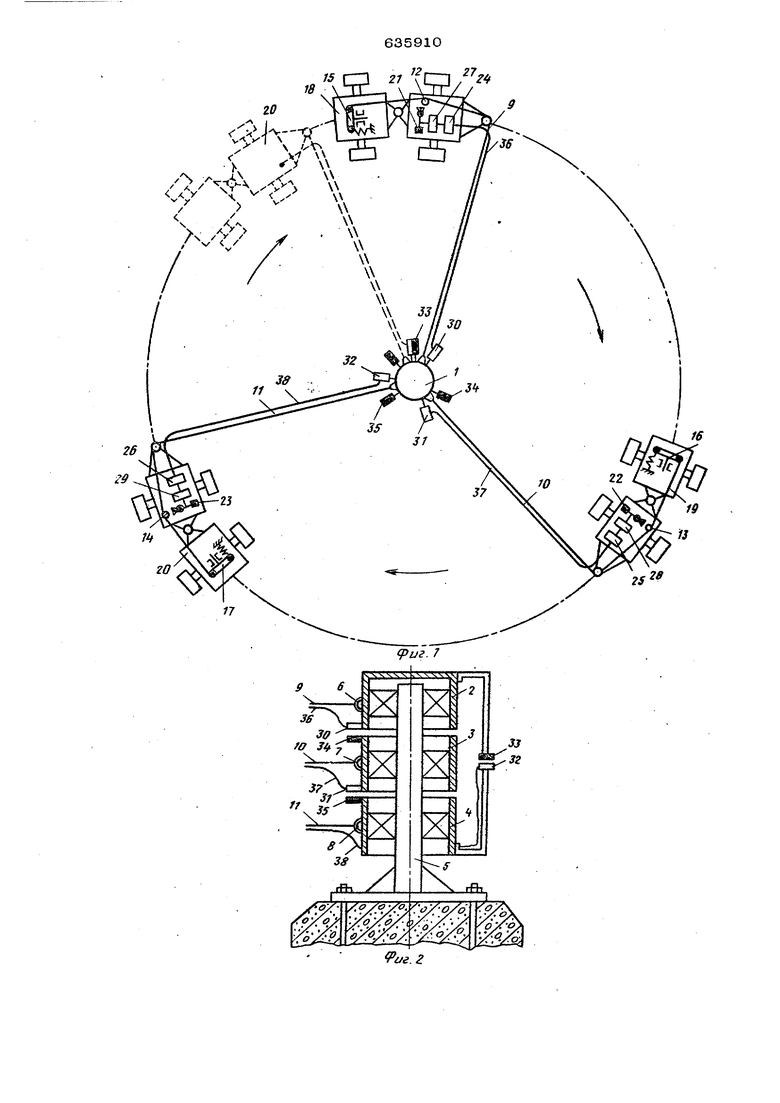
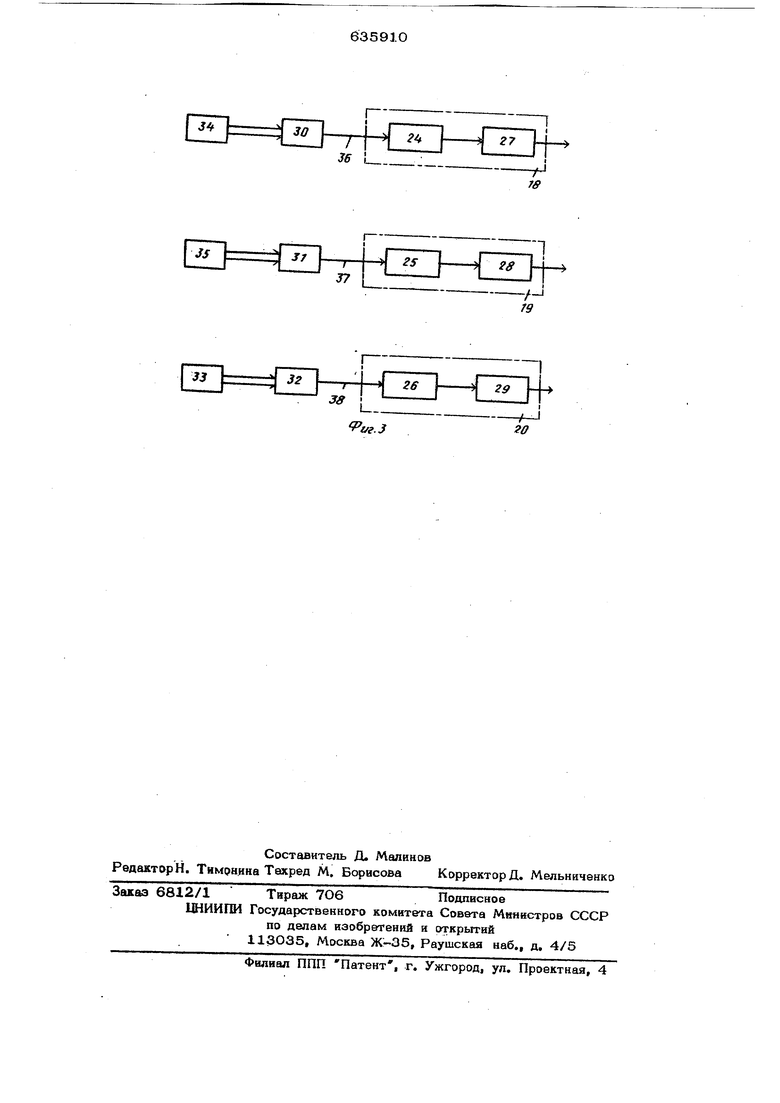
На фиг. 1 изображена схема предлагаемой системы; на фкг. 2 - поворотное устройство, обший вид; на фиг. 3 структурная схема связи датчиков с программными блоками.
В центре полигона закреплено поворотное устройство 1, выполненное из несколких независимьгс секций 2, 3 и 4, шарнирно установленных на вертикальной стойке 5 поворотного устройства и снабженных проушинами 6, 7 и 8 для закрепления тросов 9, 1О, 11. Другой конец тросов соединен с подпружиненными с по- 36 мощью пружин 12, 13 и 14 рулевыми колесами 15, 16, 17 испытываемых трак торов 18, 19, 2,0. Каждый трактор оборудован регулятором 21, 22, 23 скорости движения, соединенным с соответствующим программным блоком 24, 25, 26 через исполнительный меосавнзм 27, 28, 29. На каждой секции по обе стороны от проушины установлены активные 30, 31, 32 и пассивные 33, 34, 35 датчики. Каждый активный датчик каналом связи 36, 37, 38 соединен с соответствующим программным блоком 24, 25, 26, Активные и пассивные датчики установлены на с&клкях. на опреде ленных уров- НИХ относительно плоскости полигона, обеспечивающих возможность взаимодействия активного датчика рредьщушей сек ции с пассивным датчиком последующей. При этом сдвиг по углу пассивного датчика каждой секции относительно проушивы противоположен сдвигу по углу активного датчика. При движении испытываемых тракторо 18, 19 20 по полигону в направлении, указанном стрелкой на фиг. 1, секции 2, 3, 4 будут вращаться в том же направлении, а датчики 30-35 будут перемешаться вместе с соответствующими секдкями. Если испытьшаемые тракторы удалены друг от друга на безопасное рас стояние то взаимодействия соответствуюших датчиков не происходит, н регуляторы 21, 22, 23 скорости двкжания тра торов неподвижны. Если, например, скорость движения трактора 2О будет превышать скорость трактора 18, то расстояние между ними будет уменьшаться. Одновременно будет уменьшаться и расстояние между активным датчиком 32 и пассивным датчиком 33. Когда расстояние между тракторами 20 и 18 уменьшится до определенной величины, активный датчик 32, связанный с трактором 2О, приблизится к пассивному датчику 33, связанному с трактором 18 на рас10стояние, допускающее их взаимодействие. В результате взаимодействия активный датчик 32 посылает сигнал о каналу связи 38 в программный блок 26, который через исполнительный механизм 29 воздействует на регулятор 23 скорости движения трактора 2О, уменьшая подачу топлива. Скорость движения трактора 20 уменьшится, и расстояние между тракторами 18 и 20 увеличится. Программный блок 26 может быть снабжен реле времени, с помощью которого ок может через требуемое время воздействовать на регулятор 23 т восстанавливать первоначальную скорость трактора 20, а также выключать подачу топлива в аварийных ситуациях (например, в случае остановки трактора 18 при выходе из строя какого-либо его узла). о рмула изобретения 1.Система автоматического вождения тракторов при испытаниях на полигоне, содержащая поворотное устройство, связанное с трактором посредством троса, активные и пассивные датчики, программные блоки, отличающаяся тем, что, с целью упрощения конструкции, поворотное устройство выполнено из нескольких независимых секлий, причем на каждой секции установлены пассшные и активные датчики, а вькоды последних соединены с соответствующи ми программными блоками. 2.Система по п. 1, о т л и ч а а я с я тем, что поворотное устройство выполнено в виде вертикальной стойки, на которую насажены независимые сешши. Источники информации, принятые во внимание при экспертиза: 1.Авторское свидетельство СССР № 464284, КЛ..А О1 в. 69/04, 1972. 2.Авторское свидетельство СССР № 202605, кл. А 01 в 69/04, 1966.
. 4r
.S Jt
://4v ; ,
IS 1
иг.З
90
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ресурсных испытаний тракторов на полигоне | 1980 |
|
SU875238A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1982 |
|
SU1059470A2 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Система автоматического вождения тракторов при испытаниях на кольцевом треке | 1988 |
|
SU1630626A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство для автоматического вождения тракторов при испытании на треке | 1981 |
|
SU957781A1 |
| Устройство для автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU648155A1 |
| Устройство для автоматического вождения трактора по программной траектории движения | 1980 |
|
SU869597A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |