Изобретение относится к автоматически управляемым транспортным средствам и может быть использовано для движения по траектории, заданной линией.
Цель изобретения-улучшениеуправляемости при движении по траектории переменной кривизны.
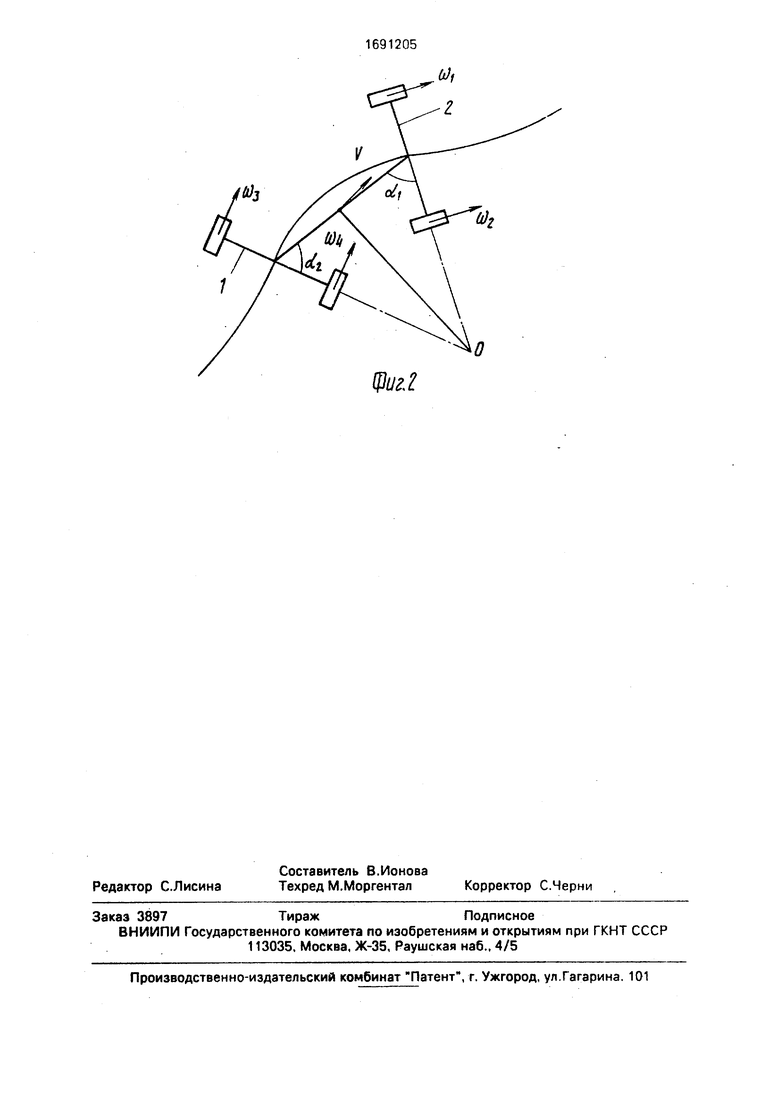
На фиг.1 схематически изображена самоходная тележка и ее основные блоки; на фиг,2 - то же, схема ее движения по направляющей линии.
Автоматическая самоходная тележка содержит два поворотных моста 1 и 2 с мотор-колесами 3-6, датчики 7 и 8 отклонения центров мостов от заданной траектории дпижения, датчики 9 и 10 углов поворота мостов, блок 11 определения частот вращения мотор-колес, автономные системы 12- 15 регулирования частот вращения мотор-колес.
При движении по траектории, заданной направляющей линией, сигналы от датчиков 7 и 8 отклонения, пропорциональные отклонению от траектории, воздействуют на автономные системы 12-15 регулирования, рассогласовывая частоты вращения мотор- колес, при этом мосты поворачиваются до положения, перпендикулярного к направляющей линии и отклонение сводится к нулю. Одновременно сигналы датчиков 9 и 10 углов поворота мостов поступают в блок 11 определения частот вращения мотор-колес, с выхода которого сигналы, пропорциональные частотам вращения мотор-колес и определенные согласно приведенным выражениям, поступают на соответствующие входы автономных систем 12-15 регулирования:
Гк
Гк
1 а (tg a 4- tg «2 ) slnai 21 tgcti tg ojz ,
М +-2Г (ctg a - ctg «2 f
О) 1 ± a (tg ai + tg да )
sin «2 21 tg a tg 0.2
1 + -7j- (ctg d - ctg «2 )2
(2)
где v - постоянная линейная скорость геометрического центра тележки;
0)1,2 -частоты вращения мотор-колес гереднего моста:
шз,4 частоты вращения мотор-колес заднего моста;
ОД , 05 - углы поворота переднего и заднего мостов;
а - колея тележки;
I - база тележки;
гк - радиус колеса,
Формулы (1) и (2) для определения частот вращения мотор-колес получены исходя из равенства угловых скоростей движения мотор-колес относительно мгновенного центра поворота тележки при установившемся режиме,
Прямолинейное движение является частным случаем движения по криволинейной траектории, когда сигналы отдатчиков 7 и 8 отклонения и датчиков 9 и 10 углов поворота мостов равны нулю. При этом частоты вращения мотор-колес равны.
Формула изобретения
Самоходная тележка, содержащая платформу и ходовую часть, выполненную в виде двух управляемых мостов с мотор-колесами, имеющими автономные системы регулирования частот вращения колес, датчики положения управляемых мостов и датчики отклонения платформы от заданной траектории движения, выходы которых соединены с входами автономных систем
регулирования частот вращения мотор-колес, отличающаяся тем, что, с целью улучшения управляемости при движении по траектории переменной кривизны, она снабжена блоком определения частот вращения мотор-колес, входы которого электрически соединены с датчиками положения управляемых мостов, а его выходы - с соот- ветствую14ими входами автономных систем регулирования частот вращения мотор-колес, причем определение частот вращения колес в упомянутом блоке осуществлено согласно следующим выражениям;
0)1,2
ВД3.4 - Гк
1 ± а (tg a + tg 02 ) sin «1 21 tgai tga2
М + -2f (ctg ai - ctg 05 )2
1 ± а (tg ai +tg as ) sin ai 21 tg 01 tg 02
V
1 -f -25- (ctg ai - ctg 02 f
0
где , Юг и Шз , (щ - частоты вращения мотор-колес переднего и заднего мостов соответственно;
v -линейная скорость геометрического центра тележки;
гк - радиус колеса;
а , ai - углы поворота переднего и заднего управляемых мостов относительно продольной оси платформы;
I - база тележки;
а - колея тележки.
О
Щи г
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| Полноприводная транспортная платформа с электроприводом поворота колес и регулируемой колеёй | 2021 |
|
RU2764857C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| РОБОТ-ТЕЛЕЖКА | 2018 |
|
RU2689049C1 |
| Самоходное шасси | 1979 |
|
SU872359A2 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2778064C1 |
| Устройство для управления транспортным средством | 1987 |
|
SU1527068A1 |
| СТЕНД И СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ РОБОКАРА | 2013 |
|
RU2561405C2 |
Изобретение относится к автоматически управляемым транспортным средствам и может быть использовано для движения по траектории, заданной линией. Цель изобретения - улучшение управляемости при движении по траектории переменной кривизны. Тележка содержит платформу и ходовую часть, выполненную в виде двух поворотных мостов 1,2 с мотор-колесами 3-6, датчики 7,8 отключения центров мостов от заданной траектории движения, датчики 9,10 углов поворота мостов, блок 11 определения частот вращения мотор-колес и автономные системы 12-15 регулирования частот вращения мотор-колес. Поворот мостов производится посредством задания различных частот вращения мотор-колесами 3-6 по сигналам датчиков 7 и 8 отклонения центров мостов от заданной траектории движения. Мгновенные значения углов поворота мостов измеряют посредством датчиков 9 и 10 и в зависимости от значений этих углов через автономные системы 12-15 регулирования задают мотор-колесам частоты вращения, определенные в блоке 11, согласно выражениям, приведенным в тексте описания изобретения. 2 ил. СП с сь ч ю о ел
| Групповая сосковая поилка для телят | 1960 |
|
SU132908A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| . | |||
