(54) УСТРОЙСТВО ДЛЯ ВВОДА КОНТЕЙНЕРОВ
В ТРУБОПРОВОД ГИДРОТРАНСПОРТНОЙ УСТАНОВКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода контейнеров в трубопровод гидротранспортной установки | 1978 |
|
SU749765A1 |
| Устройство для контроля и транспортировки деталей | 1986 |
|
SU1416968A1 |
| Весовой расходомер сыпучих материалов | 1983 |
|
SU1164556A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| Автоматизированный комплекс мониторинга процесса транспортирования нефтепродуктов по наземному сборно-разборному полевому магистральному трубопроводу с соединением "раструб" | 2023 |
|
RU2812007C1 |
| Устройство для учета суммарного веса объектов по мере их поступления | 1981 |
|
SU993041A1 |
| АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА | 1973 |
|
SU389756A1 |
| Устройство для счета плоских деталей | 1988 |
|
SU1532955A1 |
| Автоматизированное устройство для очистки бытовых сточных вод | 2019 |
|
RU2711619C1 |
| Устройство для программного регулирования термообработки в автоклаве | 1988 |
|
SU1621008A2 |
I
Изобретение относится к контейнерному гидротранспорту грузов по магистральным трубопроводам, а именно к устройствам для ввода контейнеров в трубопровод,
По основному авт. св. № 749765 известно устройство для ввода контейнеров в трубопровод ги,а1 отранспортной установки, содержащее камеру запуска с изменяемым поперечным сечением, имеющую концевой затвор и подающий лоток и соединен-.
lO
ную через запорную арматуру с магистра- .
пьным трубопроводом, при этом подающий лоток смонтирован с возможностью; вертикального перемещения в камерю запуска на штюке по меньшей мере одногю силового цилиндра, рабочая полость которюго сообщена с внутренней полостью камеры запуска, силовой цилинар снабжен механизмом регулировки хода поршня, а к торцу подающего лотка и к нижней стенке камеры запуска герметично прикреплен гофрированный фартук 1}.
Однако в таком устройстве не обеспечен контроль процесса запуска, т.е. контpojib наличия контейнеров внутри, камеры после их ввода в камеру и контроль отwrcTBHH их после операции запуска в трубопровод, что ведет к , ненадежности работы по запуску контейнеров в трубопровод.
При вводе контейнеров в камеру один из них может оказаться в месте .располо жения входной за.цвижки, а при запуске может остаться в зоне действия выХодвой задв11жки, т.е. создается аварийная ситуация, когда какая-либо задвижка не может быть полностью закрыта.
Кроме того, механическое воздействие задвижкой на контейнер ведет к ©го - раз- рущению, потерям транспортируемого груза и загрязне)1шо перекачиваемого нефтепродукта, яаляюшегося несушей жидкостью.
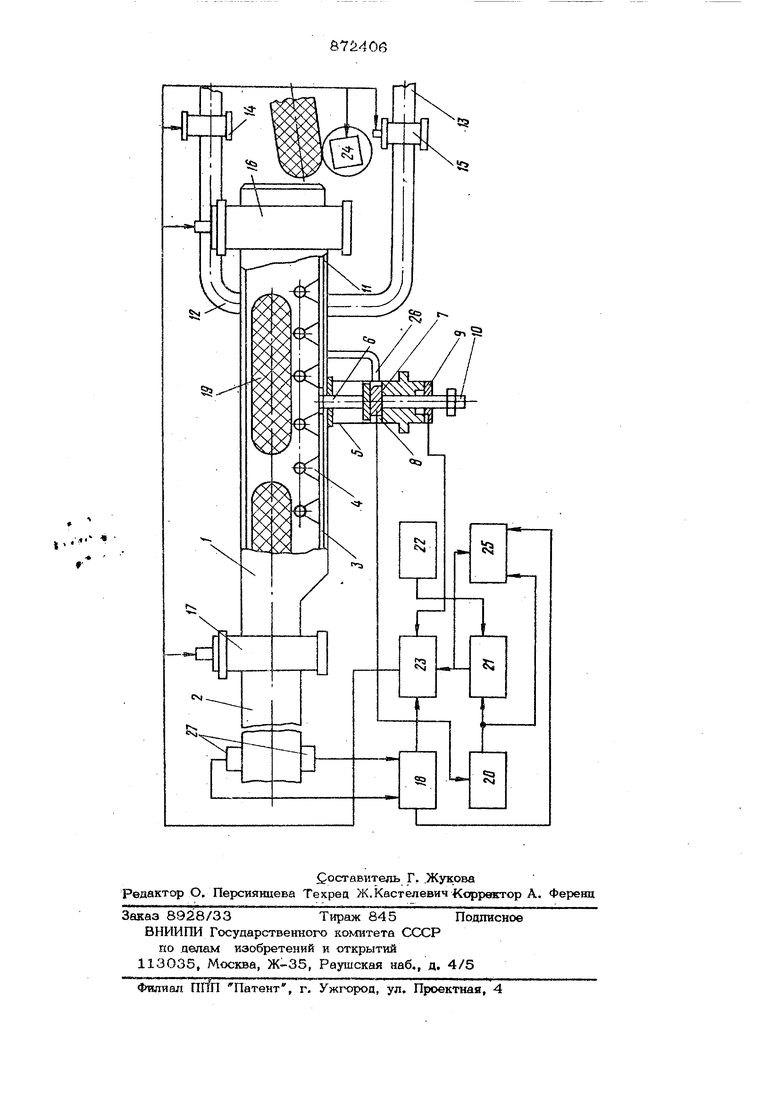
Для повышения про11зводительностн трубопроводной системы на один тру6опрс®од устанавливается два и более послваова-. тельно работающих таких устройства в связи с чем важна их аычэматнэгисвй, обеспечивающая необходимый ритм работы. Цель 1-1Эобретекия - повышение надежности и автоматизацяи полного цикла работы. Поставленная uejtb достигаетсй тем, что устройство шш ввоца контейнеров в трубопровод гиаротранспортной установки снаб.жено установленным на нижней торцовой стенке бесштоковой полости силового цилинара силоизмеритепьным аатчиком, счет чиком контейнеров установленным на выходе магистрального трубопровода из камеры запуска, весоизмерительным блоком, аацатчиком чвспа контейнеров, блоком сра внения, инцикатором и связанным с запоркой арматурой блоком управления, а меха низм регулировки хода поршня содержит цатчик высоты подъема лотка, при этом входы блока сравнен1ет соединены с задатчиком. числа контейнеров и весоизмери тельным блоком, связанным с силоизмеригельным датчиком,, входы индикатора соединены с весоизмерительным блоком, блоком сравнения и счетчиком контейнеров, входы блока управления соединены с блоком сравнения, счетчиком контейнеров и датчиком высоты подъема лотка. На чертеже изображено , устройство, общйй виц с функциона/ ьной блок-схемой автоматики. Устройство состоит из камеры запуска 1, циаметром большим, чем диаметр трубопровода 2, который расположен эксцентрично камере 1 с совпадением их верхни образующих, В камере 1 установлен подвюкной подаюигай лоток 3 коробчатой форг.Сы, на основании которого смонтированьт сеюшонкыо рольганги 4, В нижней части камеры 1 установлен силовой цилиндр 5, шток 6 которого связан с лотком 3. На нижней торцовой стенке 7 цилинцра 5 в бесштоковой полости установлен сило измерительный датчик 8, а с внешней стороны стенки 7 - датчик 9 высоты подъема лотка 3, Цилиндр 5 снабжен меха- низмом 10 регулировки хода поршня силового цилинцра 5. Нижняя часть камеры 1 и лоток 3 соединены гофрированным фартуком 11 из; резинотканевого матеркала. Камера 1 связана с напорным трубо провоцок 12,, свивЁЕЫМ трубопроводом 13 и оборудована задвижками 14-17, За зацвйжкой 17 на трубопроводе 2 установлен счетчик 18 контейнеров 19. Функциональная схема автоматики состоит VI3 весоизмерительного блока 2О, блока сравнения 21, задатчика 22 числа контейнеров в партии запуска, блока уп-равления 23., связанного с исполнител)ными органами зацвижек 14-17 и поцающего транспортера 24 к блока индикации 25. В исходном состоянии блок индикации 2.5 показывает ноль. Оператор устанавливает в задатчике 22 нужное число контейнеров 19 запускаемой партии, а с помощью механизма 10 - необходимую высоту подъема лотка 3. По сигналу с блока управления 23 закрывается задвижка 17, открывается зацвижка 16 и включается подвижный транспортер24, Контейнеры загружаемой партии подаются в камеру запуска 1. При этом на выходе весозмерительного блока 2О появляются импульсы напряжения, соответствующие числу контейнеров на лотке 3. Импульсы поступают на вход блока сравнения 21 вход блока индикации 25. Когда число имп льсов на входе блока сравнения 21 совпадает с числом, ранее установленным оператором в задатчике 22, на выходе блока сравнения 21 появляется импульс напряжения, поступающий в блок индикации 25 и устанавливающий его на ноль. Этот же импульс напряжения поступает на вход блока управления 23, с выхода которого подается сигнал на остановку транспортера 24, закрытие заавижки 16. После закрытия задвижки 16 сигнал из блока управления 23 дает разрешение на открытие задвижки 14, и в камеру 1 подается перекачиваемая жидкость. Камера 1 заполняется, давление в ней поднимается и подается по импульсным трубкам 26 в рабочую полость цилиндра 5, что обеспечивает подъем лотка 3. При достижении штоком механизма 1О крайнего верхнего положения срабатывает датчик 9, который через блок управления 23 подает с ягнал на открытие задвижки 17, и контейнеры 19 выходят в магистральный трубопровод 2. В счетчике 18, содержащем ультразвуковые излучатели-приемники 27, устанавливается посредством задатчика его вторичной аппаратуры число контейнеров вводимой в трубопровод партии. При совпадении числа установленного и числа прошедших контейнеров 19 через акустический тракт излучателей-приемников 27 на выходе счатчГЕка 18 появляется импульс напряжения, который поступает в блок управления 23, с выхода которого подается команда на закрытие задвижки 17 и затем на открытие задвижки 15 и начинается слив жидкости в дренаж. Если по каким-либо причинам не все контейнеры 19 из партии прошли акусти58ческий- тракт излучателей-приемников 2Т,. то ультразвуковой счетчик 18 не выдает импульс напряжения в блок управления 23 а регистрирует только число прошедших контейнеров. Таким образом, оператор получает данные о числе контейнеров ушедших в магистральный трубопровод. По окончании слива лоток 3 опускается в первоначальное положение и сигнал с выхода датчика 9 перестает поступать в блок управления 23, и если все Загруженные в камеру контейнеры ушли, то сигнал на выходе весоизмерительного блока 2О отсутствует, а в блоке инцикации 25 зафиксирован ноль, следовательно, камера пуста. Процесс запуска другой партии аналогичен описанному. Если же, хотя бы один контейнер из партии остался в камер то по сигналу от весоизмерительного блока 20 в блоке индикации 25 это регистри руется соответствующей цифрой, и в этом случае дальнейшее решение принимает оператор. Использование предложенного, устройства дает возможность производить контроль и учет объектов, запускаемых в магистральный трубопровод, что позволяет автоматизировать операции запуска и обеспечить безаварийную работу устройства, тем самым повышая его надежность. 6 6 Формула изобретения Устрюйство для ввода контейнеров в трубопровод гидротранспортной установки |по авт. св. М 749765, отл нчагош е е с я тем, что, с целью повышения надежности и автоматизации полного цикла работы, устройство снабжено установленным на нижнейторцовой стенке бесштоковой полости силового цилиндра силоизмерительным датчиком, счетчиком контейнв ров, установленным на выходе магистрального трубопровода из камеры Збшуска, весоизмерительнь1М блоком, задатчшсом чкола контейнеров, блоком сравнения, индикатором и связанным с запорной арматурой блоком управления, а механизм регулировки хода поршня содержит датчик высоты подъема лотка, при этом входы блока сравнения соединены с задатчиком числа контейнеров и весоизмерительным блоком, связанным с силоизмерительным датчиком, входы индикатора соединены с весоизмерительным блоком, блоком сравнения и счет чиком контейнеров, входы блоКа управления соединены с блоком сравнения, счетчиком контейнеров и датчиком высоты подъема лотка. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 749765, кл. В 65 G 51/28, 198О.
