(54) КОПИРОВАЛЬНЫЙ СТАНОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки криволинейных поверхностей деталей методом копирования | 1979 |
|
SU856752A1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| Копировальный станок | 1980 |
|
SU908551A1 |
| Копировальный станок | 1979 |
|
SU850358A1 |
| Копировальный станок | 1979 |
|
SU876383A2 |
| Ленточно-шлифовальное устройство | 1978 |
|
SU891364A2 |
| Ленточно-шлифовальный станок | 1977 |
|
SU704765A2 |
| Копировальный станок | 1979 |
|
SU821078A1 |
| Копировальный станок | 1980 |
|
SU1009719A1 |
| Станок для обработки деталей переменной ширины | 1981 |
|
SU952471A1 |
1
Изобретение относится к области металлообработки и предназначено для обработки маложестких деталей, например лопаток газотурбинных двигателей .
Известны копировальные станки, включающие привод вращения инструмента с гибкой связью, содержащей ведущую и ведомую ветви, и устройство для регулирования силы поджима следящего ролика к копиру 1.
Однако при изменении сил в зоне обработки в процессе обработки детали на известном станке появляется несоответствие силы Р силе давления следящего ролика на копир, в результате чего сказываются разными деформаций копира и обрабатываемой детали, что снижает точность обработки ..
Цель изобретения - повышение точности обработки.
С этой целью предлагаемый станок снабжен устройством для изменения силы натяжения ведущей ветви гибкой связи, кинематически связанным с устройством для регулирования силы поджима следящего ролика к копиру.
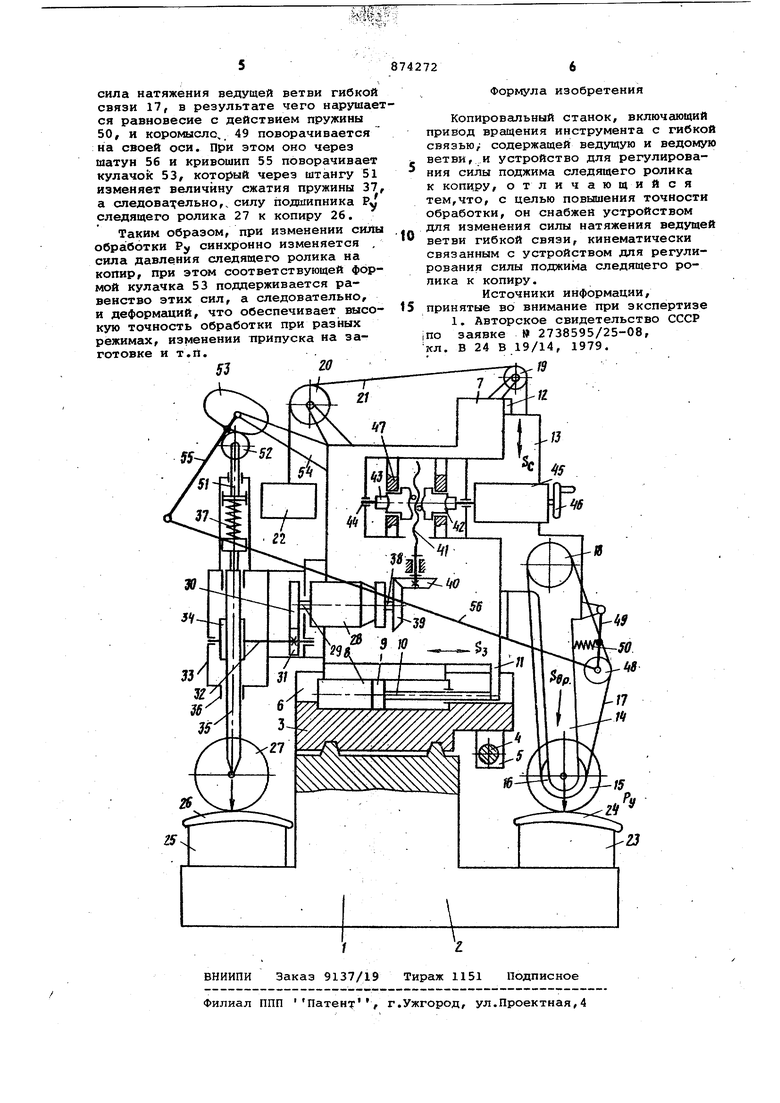
На чертеже представлен станок.
Станина 1 станка имеет направляющие 2, в которых установлен стол 3 продольной подачи, осуществляемой, например, вращением от привода (на чертеже не изображен) ходового винта 4, взаимодействующего с закрепленной на столе 3 продольной подачи гайкой 5.
В направляющих 6 стола 3 продольtoной подачи установлен с возможностью горизонтального (поперечного) перемещения корпус стола 7 задающей подачи S, которая осуществляется, например , силовым гидроцилиндром 8,
15 поршень 9 которого штоком 10 через кронштейн 11 соединен со столом 7 (элементы управления возвратно-поступательными движениями поперечной подачи БЗ т.е. гидроцилиндра 8, на
20 чертеже не изображены).
В направляющих 12 корпуса стола 7 установлен с возможностью вертикального перемещения стол 13 следящей подачи.
25
На кронштейне 14 стола 13 установлен обрабатывающий инструмент 15, например, алмазный круг, привод шпинделя 16 которого во вращении осуществлен гибкой (ременной) передачей
30 17 от электродвигателя 18, также
усаановленного на 13 следящей подачи.
На столе 7 с помощью кронштейнов установлены с возможностью свободного вращение ролики 19 и 20, через которые перекинут трос 21, бдин конец которого закреплен на столе 13, ,а второй несет груз 22, уравновешивающий вес стола 13.
На станине 1 с помощью приспособления 23 крепится обрабатываемая деталь (лопатка) 24, а с помощью приспособления 25 - копир 26, с которым взаимодействует контактный элемент - ролик 27 следящего устройства, в качестве которого использован например гидроусилитель крутящего момента 28, установленный на корпусе стола 7.
На входном валу 29 гидроусилителя 28 закреплена шестерня 30, взаимодействующая с шестерней 31, закрепленной на валу 32, установленном на подшипниках в корпусе редуктора 33, который закреплен на корпусе стола 7. На валу закреплена шестерня 34, входящая в зацепление с зубчатой рейкой 35, контактный (следящий) ролик 27. Зубчатая рейка имеет возможность перемещаться в направляющих 36 корпуса редуктора 33 и поджимает ролик 27 к копиру 26 под действием пружийы 37.
Выходной вал 38 гидроусилителя 28 коническими шестернями 39 и 40, кинематически соединен с винтом 41, подшипниковые опоры которого размещены на корпусе 7. На винте 41 с по,мощью шариковых опор установлена гайка 42, выполненная в виде червячного колеса, взаимодействующего с червяком 43, опоры которого установлены с возможностью вращения в подшипниках 44, закрепленных на столе 13 следящей подачи. С червяком 43 кинематически соединен через редуктор 45 задающий элемент 46 подачи врезания , например, маховичок ручной подачи. При этом в качестве механизма врезания использован стол следящей подачи. Червячное колесо гайки 42 установлено в подшипниковых опсзрах 47 стола 13.
Кинематическая связь входного вала 29 гидроусилителя 28 со следящим роликом 27 и выходного вала 38 со столом следящей подачи осуществлена кинематическими цепями 30 - 31 - 32 - 34 - 35 и 39 - 40 - 41 - 43 соответственно с отношением передаточный чисел, равным 1. При этом масштаб копирования равен 1, т.е. смещения контактного ролика 27 и инструмента равны, что позволяет использовать в качестве копира эталонную деталь. Жесткость копира 26, идентичного по размерам обрабатываемой детали 24, равна жесткости обрабатываемой детали, для чего он
изготовлен из того же материала, что и деталь, способ крепления и базы крепления копира одинаковы с обрабатываемой деталью, что позволяет силу поджима Р следящего ролика 27 к копиру 26 принять равной радиально составляющей силы шлифования Р.. , . т.е. силе поджима инструмента к летали.
Отличительной особенностью заявляемого станка является то, что он снабжен установленным в цепи ведущей ветви гибкой связи 17 устройством для измерения силы ее натяжения, выполненным в виде сгибаемого гибкой связью ролика 48, расположенного на имеющем возможность начаться на оси коромысле 49, поворот которого в направлении натяжения гибкой связи осуществлен взаимодействующей с ним пружиной -50. Пружина 3.7, поднимающая ролик 27 к КОПИРУ 26, вторым концом упирается в штангу 51, несущую ролик 52, взаимодействующий ,с кулачком 53, ось вращения которого закреплена с помсяцью кронштейна 54 на корпусе 7 стола поперечной подачи. С кулачком 53 жестко связан кривошип 55, шарнирно соединенный шатуном 56 с коромыслом 49.
При работе станка от силового цилиндра В стол 7 задающей подачи совершает поперечные перемещения S в направляющих 6 стола 3 продольной подачи, кото)йый перемещается периодицески (на строку) или непрерывно рт вращения ходового винта 4. Зубцатая рейка 35 совершает перемещения направляющих 36 от взаимодействия рледящего ролика 27 с копиром 26. Перемещения рейки через шестерню 34, вал 32, шестерни 31 и 30 передаются на входной вал 29 гидроусилителя 28, выходной вал 38 которого вращается синхронно с входным валом 29 и увеличенный крутящий момент через конические шестерни 34 и 40 передает винту 41, который, вращаясь, смещает в направленииSf- червячное колесо гайки 42, а вместе с ним через подшипник 47 стол 13 задающей подачи. Вместе со столом в направляющих 12 смещается инструмент 15, который, вращаясь от двигателя 18, обрабатывает деталь 24, придавая ей форму копира 26. Так как копир имеет такую же жесткость, как и деталь 24, а также идентичен ей по размерам, базам крепления и способу зажима, то его деформация от силы pj равна деформации детали 24 от силы шлифования Р, что усз раняет погрешность обработки, возникающую от разности деформаций детали и копира, когда эти силы не равны между собой.
При изменении силы шлифования Р , например, в результате затупления инструмента, неравномерности припусг ка на заготовке и т.п., изменяется
