(54) ГИДРАВЛИЧЕСКОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление транспортного средства | 1978 |
|
SU688368A1 |
| Система рулевого управления транспортного средства (ее варианты) | 1982 |
|
SU1022853A1 |
| Рулевое управление транспортного средства | 1980 |
|
SU893662A1 |
| Транспортное средство | 1983 |
|
SU1154117A1 |
| Гидромеханическая трансмиссия транспортного средства | 1989 |
|
SU1646919A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидравлическое рулевое управлениеТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU797943A1 |
| Система рулевого управления транспортного средства с передними и задними управляемыми колесами | 1980 |
|
SU943063A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2157774C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138418C1 |
1
Изобретение относится к машиностроению, в частности к системам рулевого управления транспортных средств.
Известно гидравлическое рулевое управление транспортного средства, содержащее дозирующий насос-мотор, подвижный элемент которого кинематически связан с рулевым колесом, и распределитель рулевого управления, гидравлически соединенный с гидронасосом, полостями дозирующего насоса-мотора, гидробаком и полостями исполнительного гидроцилиндра, выходное звено которого кинематически связано с управляемыми колесами 1.
Недостатком известного гидравлического рулевого упрдвлеиия транспортного средства является невозможность обеспечения переменного передаточного отношения рулевого управления при повороте, что ухудшает управляемость и маневренность транспортного средства.
Цель изобретения - улучшение управляемости и маневренности транспортного средства путем получения переменного передаточного числа рулевого управления.
Указанная цель достигается тем, что дозирующий rtacoc-MOTOp выполнен в виде гидРомашины с регулируемой производительностью, орган управления которой кинематически связан с управляемыми колесами транспортного средства.
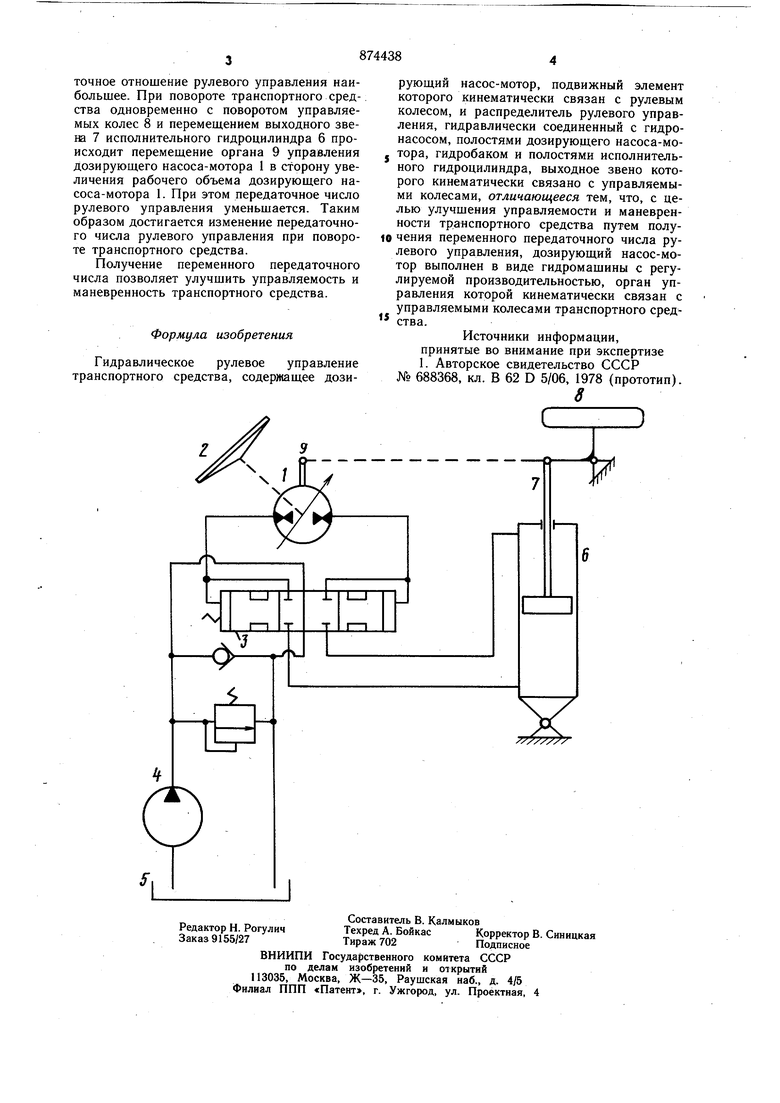
На чертеже представлена схема гидравлического рулевого управления транспортного средства.
Гидравлическое рулевое управление содержит дозирующий насос-мотор 1, ротор которого кинематически связан с рулевым колесом 2, и распределитель 3 рулевого управления, имеющий гидравлическую связь
10 с гидронасосом 4, полостями дозирующего насоса-мотора 1, гидробаком 5 и рабочими полостями исполнительного гидроцилиндра 6 выходное звено 7 которого кинематически связано с управляемыми колесами 8 транспортного средства. В качестве дозирующе15го насоса-мотора 1 применена гидромашина регулируемой производительности, орган 9 управления которой связан с управляемыми колесами 8 транспортного средства.
При прямолинейном движении транспортного средства орган 9 управления дозирующего насоса-мотора 1 находится в положении, соответствующем наименьшему рабочему объему последнего. При этом переда
