(54) ВЕРТИКАЛЬНЫЙ Z-ОБРАЗНЫЙ КОНВЕЙЕР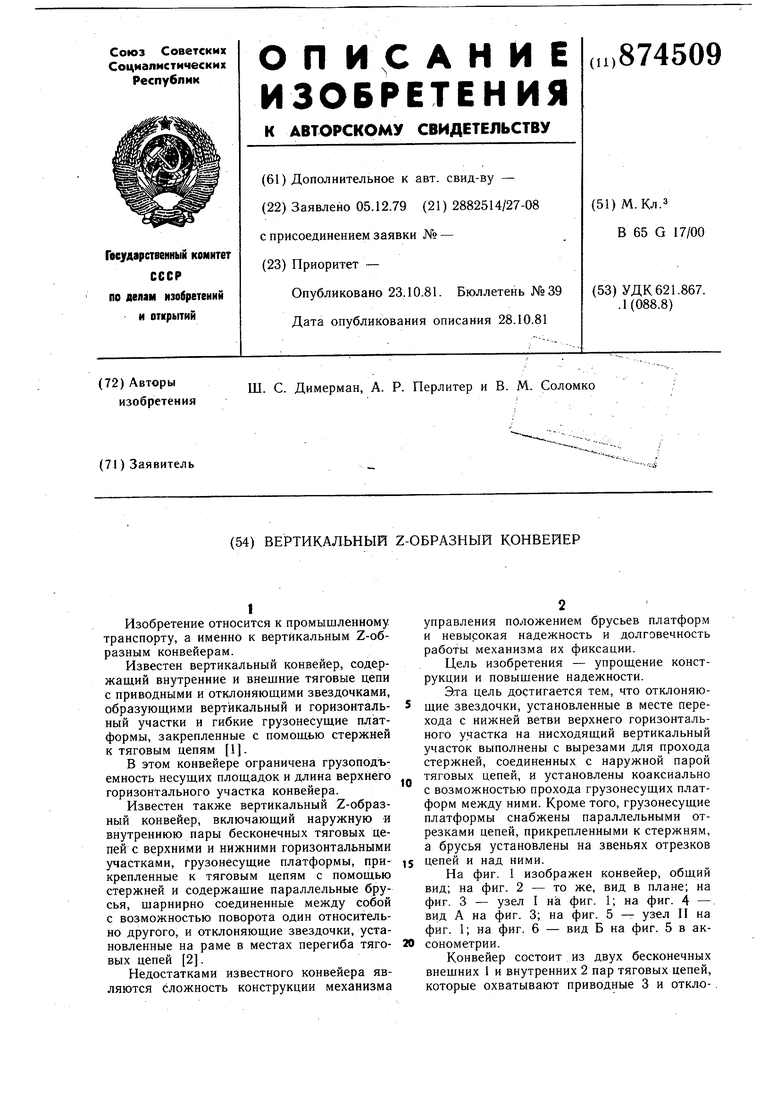
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный @ -образный конвейер для штучных грузов | 1984 |
|
SU1217731A1 |
| Вертикальный @ -образный конвейер | 1984 |
|
SU1221089A1 |
| Вертикальный цепной конвейер | 1985 |
|
SU1315368A1 |
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1549863A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1982 |
|
SU1071537A1 |
| Конвейерная система | 1985 |
|
SU1298145A1 |
| Вертикальный цепной конвейер | 1990 |
|
SU1776247A3 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1972 |
|
SU466157A1 |
| Подъемное устройство | 1990 |
|
SU1722981A1 |
| Вертикальный цепной конвейер | 1983 |
|
SU1113325A1 |
1
Изобретение относится к промышленному транспорту, а именно к вертикальным Z-образным конвейерам.
Известен вертикальный конвейер, содержащий внутренние и внешние тяговые цепи с приводными и отклоняющими звездочками, образующими вертикальный и горизонталь- 5 ный участки и гибкие грузонесущие платформы, закрепленные с помощью стержней к тяговым цепям 1.
В этом конвейере ограничена грузоподъемность несущих площадок и длина верхнего горизонтального участка конвейера.
Известен также вертикальный Z-образный конвейер, включающий наружную и внутреннюю пары бесконечных тяговых цепей с верхними и нижними горизонтальными участками, грузонесущие платформы, при- 5 крепленные к тяговым цепям с помощью стержней и содержащие параллельные брусья, щарнирно соединенные между сооой с возможностью поворота один относительно другого, и отклоняющие звездочки, установленные на раме в местах перегиба тяго- 20 вых цепей 2.
Недостатками известного конвейера являются сложность конструкции механизма
управления положением брусьев платформ и невырокая надежность и долговечность работы механизма их фиксации.
Цель изобретения - упрощение конструкции и повышение надежности.
Эл-а цель достигается тем, что отклоняющие звездочки, установленные в месте перехода с нижней ветви верхнего горизонтального участка на нисходящий вертикальный участок выполнены с вырезами для прохода стержней, соединенных с наружной парой тяговых цепей, и установлены коаксиально с возможностью прохода грузонесущих платформ между ними. Кроме того, грузонесущие платформы снабжены параллельными отрезками цепей, прикрепленными к стержням, а брусья установлены на звеньях отрезков цепей и над ними.
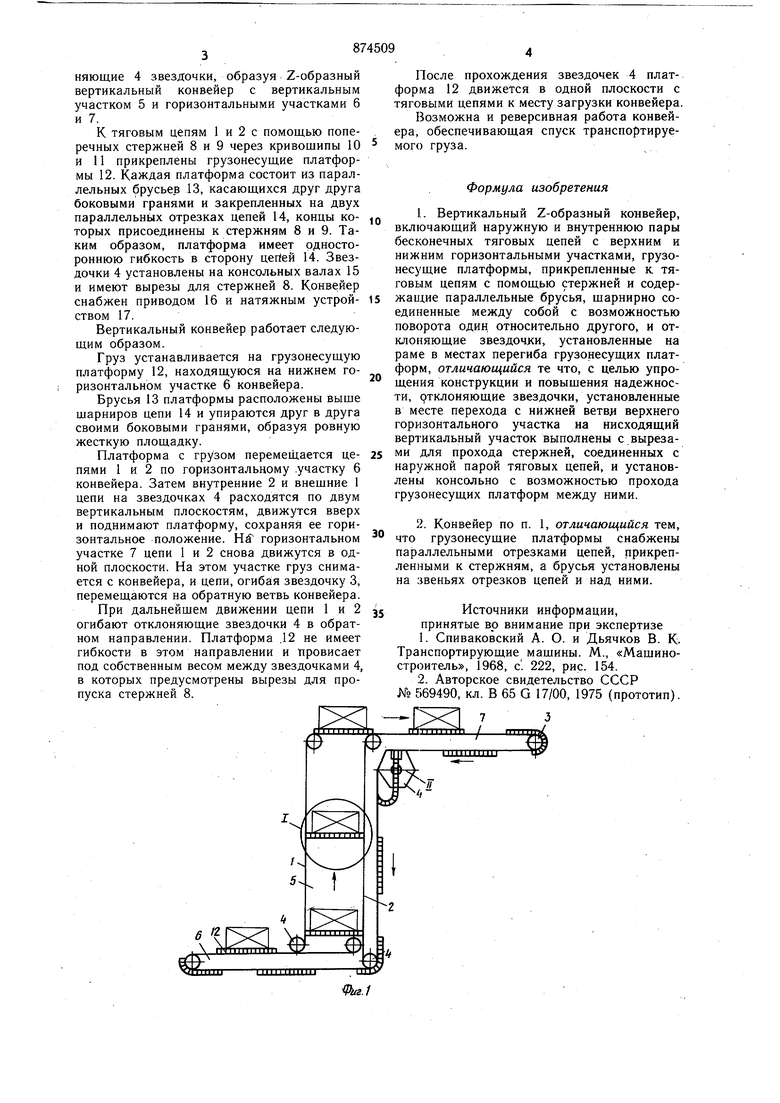
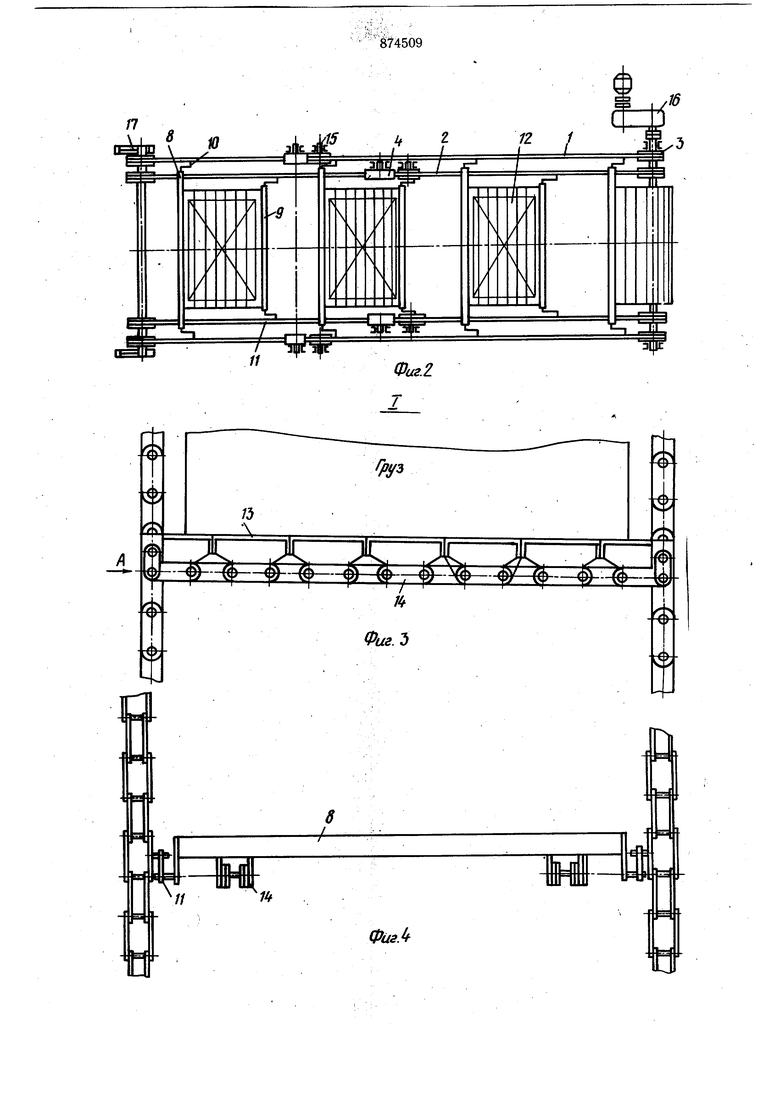
На фиг. 1 изображен конвейер, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - узел II на фиг. 1; на фиг. 6 - вид Б на фиг. 5 в аксонометрии.
Конвейер состоит из двух бесконечных внещних 1 и внутренних 2 пар тяговых цепей, которые охватывают приводные 3 и откло- . няющие 4 звездочки, образуя Z-образный вертикальный конвейер с вертикальным участком 5 и горизонтальными участками 6 и 7. К тяговым цепям 1 и 2 с помощью поперечных стержней 8 и 9 через кривошипы 10 и 11 прикреплены грузонесущие платформы 12. Каждая платформа состоит из параллельных брусьев 13, касающихся друг друга боковыми гранями и закрепленных на двух параллельных отрезках цепей 14, концы которых присоединены к стержням 8 и 9. Таким образом, платформа имеет одностороннюю гибкость в сторону цейей 14. Звездочки 4 установлены на консольных валах 15 и имеют вырезы для стержней 8. Конве;йер снабжен приводом 16 и натяжным устройством 17. Вертикальный конвейер работает следующим образом. Груз устанавливается на грузонесущую платформу 12, находящуюся на нижнем горизонтальном участке 6 конвейера. Брусья 13 платформы расположены выше шарниров цепи 14 и упираются друг в друга своими боковыми гранями, образуя ровную жесткую площадку. Платформа с грузом перемещается цепями 1 и 2 по горизонтальному .участку 6 конвейера. Затем внутренние 2 и внешние 1 цепи на звездочках 4 расходятся по двум вертикальным плоскостям, движутся вверх и поднимают платформу, сохраняя ее горизонтальное положение. Ни горизонтальном участке 7 цепи 1 и 2 снова движутся в одной плоскости. На этом участке груз снимается с конвейера, и цепи, огибая звездочку 3, перемещаются на обратную ветвь конвейера. При дальнейшем движении цепи 1 и 2 огибают отклоняющие звездочки 4 в обратном направлении. Платформа .12 не имеет гибкости в этом направлении и провисает под собственным весом между звездочками 4, в которых предусмотрены вырезы для пропуска стержней 8. После прохождения звездочек 4 платформа 12 движется в одной плоскости с тяговыми цепями к месту загрузки конвейера. Возможна и реверсивная работа конвейера, обеспечивающая спуск транспортируемого груза. Формула изобретения 1.Вертикальный Z-образный конвейер, включающий наружную и внутреннюю пары бесконечных тяговых цепей с верхним и нижним горизонтальными участками, грузонесущие платформы, прикрепленные к тяговым цепям с помощью стержней и содержащие параллельные брусья, щарнирно соединенные между собой с возможностью поворота один относительно другого, и отклоняющие звездочки, установленные на раме в местах перегиба грузонесущих платформ, отличающийся те что, с целью упрощения конструкции и повышения надежности, ртклоняющие звездочки, установленные в месте перехода с нижней ветвл верхнего горизонтального участка на нисходящий вертикальный участок выполнены с вырезами для прохода стержней, соединенных с наружной парой тяговых цепей, и установлены консольно с возможностью прохода грузонесущих платформ между ними. 2.Конвейер по п. 1, отличающийся тем, что грузонесущие платформы снабжены параллельными отрезками цепей, прикрепленными к стержням, а брусья установлены на звеньях отрезков цепей и над ними. Источники информации, принятые во внимание при экспертизе 1.Спиваковский А. О. и Дьячков В. К. Транспортирующие машины. М., «Машиностроитель, 1968, с . 222, рис. 154. 2.Авторское свидетельство СССР № 569490, кл. В 65 G 17/00, 1975 (прототип). А, Л А -€Ф-@-(J)-(О Е3 /4 . 3
.ш Фиг Л §
