Изобретение относится к промышленному транспорту, а именно к конвейерным системам, предназначенным для складов и цехов, и может быть использовано в различных отраслях промышленности и народного хозяйства для транспортирования с одного уровня на другой штучных грузов, например, мешков, пакетов, ящиков, а также в гибких автоматизированных производствах в качестве транспортно-накопи- тельных устройств,
Целью изобретения является унрош,ение конструкции.
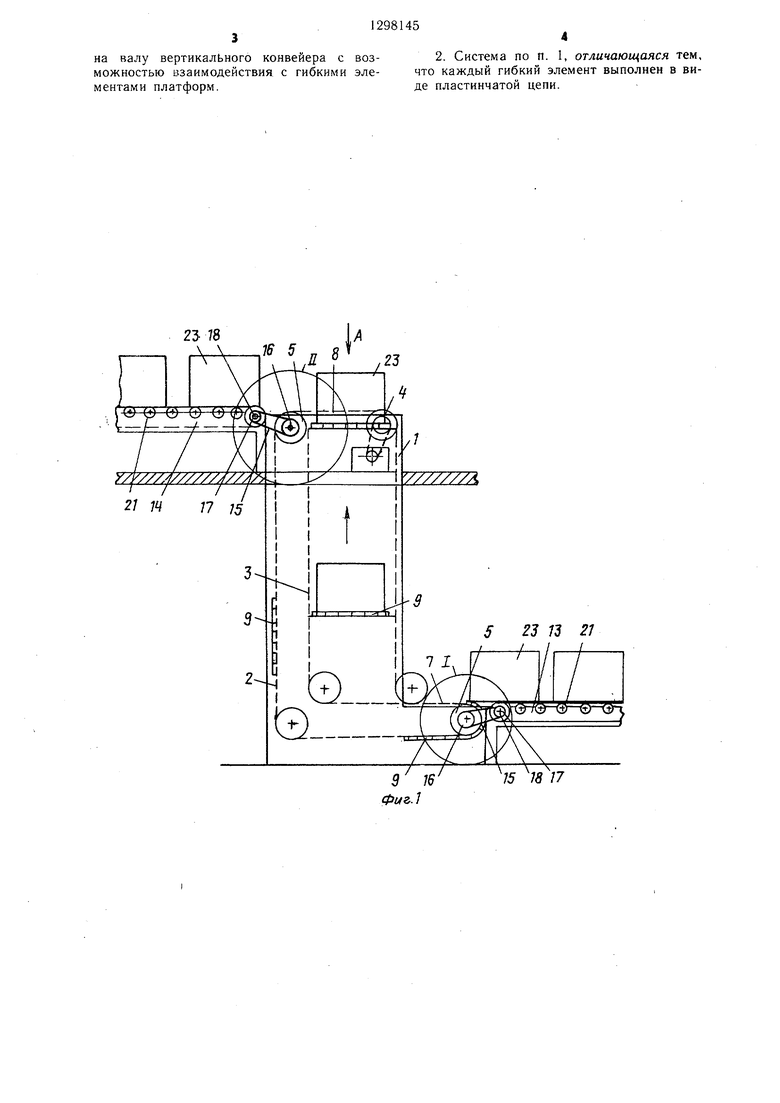
На фиг. 1 изображена конвейерная система; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Конвейерная система содержит вертикальный конвейер 1, включающий четыре тяговых органа, состоящих из наружной пары тяговых цепей 2 и внутренней пары тяговых цепей 3. Тяговые цепи 2 и 3 оги- бают приводные звездочки 4 и отклоняющие звездочки 5, свободно сидящие на валах 6 (фиг. 2), образуя Z-образный контур с горизонтальными участками 7 и 8 (фиг. 1).
Платформа 9 имеет стержни 10 и состоит из параллельных брусьев И, закрепленных на двух гибких элементах в виде пластинчатых цепей 12. Как продолжение горизонтальных участков 7 и 8 вертикального конвейера 1 установлены горизонталь- ные конвейеры в виде рольгангов 13 и 14.
Механизмы согласования установлены в зонах ногрузо-разгрузочных операций между рольгангами 13 и 14 и вертикальным конвейером 1.
Каждый механизм согласования включает управляющее приспособление и цепную передачу, которая имеет цепь 15, охватывающую звездочки 16 и 17, установленные соответственно на валу 6 вертикального кон- вейера 1 и валу 18 одного из рольгангов 13 или 14.
Управляющее приспособление выполнено в виде двух дополнительных звездочек 19 и 20, закрепленных на валу 6 вертикального конвейера 1 с возможностью взаимодействия с пластинчатыми цепями 12 платформы 9.
Рольганги 13 и 14 имеют ролики 21, связанные между собой кинематической связью 22. Конвейерная система транспор- тирует грузы 23.
Конвейерная система работает следующим образом.
При включении привода конвейерной системы грузонесущая платформа 9 под- ходит к одному из рольгангов 13 (зона I фиг. 1). Огибая отклоняющие звездочки
5, платформа 9 двумя параллельными пластинчатыми цепями 12 вступает в зацепление с дополнительными звездочками 19 и 20, жестко сидящими на валу 6, которые, поворачиваясь под воздействием пластинчатых цепей 12, передают вращение на сидящую на то.м же валу 6 звездочку 16, .которая через цепь 5 приводит во вращение звездочку 17. Звездочка 17 жестко связана с приводным валом 8 рольганга 13.
Грузы 23, находящиеся на рольгангах 13, начинают перемегцаться в сторону вертикального конвейера I со скоростью, равной скорости движения платформ 9. Первый по ходу движения рольганга 3 груз 23 плавно переходит на платформу 9, находящуюся на горизонтальном участке 7, без изменения скорости. Как только пластинчатые цепи 12 платформы 9 выйдут из зацепления с дополнительными звездочками 19 и 20, рольганг 13 останавливается вместе с находящимся на нем очередным грузом 23.
Груз 23, размещенный на платформе 9, поднимается вместе с ней по вертикальному конвейеру 1. На горизонтальном участке 8 .вертикального конвейера I пластичча- тые цепи 12 при движении платформы 9 вступают в зацепление с дополнительными звездочками 19 и 20, жестко сндяаи ми на валу 6 (зона II). Как указано выше, вращение от дополнительных звездочек 19 и 20 через звездочку 16, охватывающую ее .цепь 15, передается на приводной вал 18 рольганга 14, который начинает рабогать. Груз 23 плавно переходит на рольганг i4, а платформа 9, огибая отклоняющие звездочки 5, перемещается вертикальным конвейером 1. Как только пластинчатые цепи 12 выходят из зацепления с дополнительными звездочками 19 и 20, рольганг 14 останавливается вместе с грузом 23.
При подходе следующей платформы 9 к рольгангу 13 цикл повторяется.
Формула изобретения
1. Конвейерная система, содержащая горизонтальные загрузочный и разгрузочный конвейеры, вертикальный конвейер с четырьмя тяговыми органами и с монтиро- ванньши на них гибкими элементами 1лат- форм и-механизмы согласования с управляющими приспособлениями и цепными передачами, одна из звездочек каждой из которых установлена на валу соответствующего горизонтального конвейера, а другая - на валу вертикального конвейера, отличающаяся тем, что. с целью упрощения конструкции, каждое управляющее приспособление выполнено Е виде двух дополнительных звездочек, закрепленных
1298145 34
на валу вертикального конвейера с воз-2. Система по п. 1, отличающаяся тем,
можностью взаимодействия с гибкими эле- что каждый гибкий элемент выполнен в ви- ментами платформ.де пластинчатой цепи.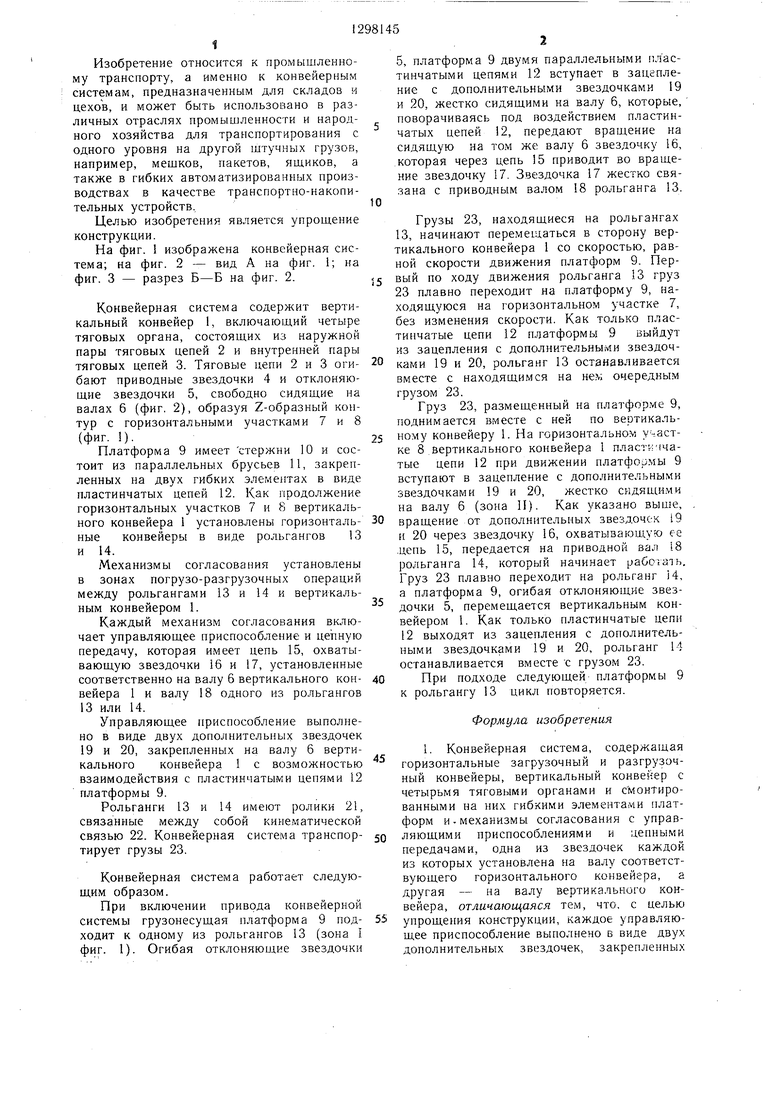
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВЫГРУЗКИ СЫПУЧИХ ГРУЗОВ из КРЬ1ТЬ!Х ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1969 |
|
SU235624A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1257031A1 |
| Вертикальная конвейерная система | 1990 |
|
SU1738743A1 |
| Вертикальный цепной конвейер | 1990 |
|
SU1776247A3 |
| МАШИНА ДЛЯ РАЗГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ ПОЛУВАГОНОВ | 2005 |
|
RU2279396C1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1602814A1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU198225A1 |
| Устройство для загрузки конвейера штучными грузами | 1980 |
|
SU945019A1 |
| Вертикально замкнутый тележечный конвейер | 1981 |
|
SU1002201A1 |
Изобретение относится к промышленному транспорту и позволяет упростить конструкцию устр-ва. Оно включает рольганги (Р) с кинематически связанными между собой роликами 21, вертикальный конвейер с четырьмя тяговыми органами 2, 3 и механизм согласования с управляюш,ими приспособлениями и цепной передачей. Она имеет цепь 15, охватывающую звездочки 16 и 17, установленные соответственно на валу 6 и на валу 18 одного из Р. Каждое управляюш.ее приспособление выполнено в виде двух дополнительных звездочек 19 и 20, закрепленных на валу 6 вертикального конвейера. Звездочки 19 и 20 взаимодействуют со смонтированными на тяговых органах гибкими элементами платформ (П). Каждый гибкий элемент выполнен в виде пластинчатой цепи 12. При включении привода П подходит к одному из Р и цепями 12 вступает в зацепление со звездочками 19 и 20. Они передают через вал 6 врашение на звездочку 16, которая через цепь 15 приводит во враш.ение звездочку 17. Звездочка 17 жестко связана с приводным валом 18 одного из Р. Груз перемешается на П, находящуюся на горизонтальном участке. Цепи 12 выходят из зацепления с звездочками 19 и 20 и Р останавливается. Аналогично происходит разгрузка груза с П на приемные Р. 1 З..П.Ф-ЛЫ, 3 ил. (Л tc ;о сх 4; ел
г ,23
% V«/7
Б-Б
2д
-+
ХЯ псжтигутагу дг
% ъ- / -s
/
72 77 .З
| Пертен Ю | |||
| А | |||
| Крутонаклонные конвейеры | |||
| М.: Машиностроение, 1977, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1257031A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
